一种用于更换机械臂夹具的衔接装置的制作方法
本发明涉及机械臂,尤其涉及一种用于更换机械臂夹具的衔接装置。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性,因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。其中,装设有夹具的机械臂则是工业上常见的机械臂类型之一,当需要对不同的制品进行夹持时,则使得机械臂上的夹具型号也会随制品进行更换,以适应不同的制品;然而,在需要更换夹具时,都是工作人员进行更换,具体如下:
2、公开号为cn217413998u的中国专利文献公开了一种便于快速更换夹具的机械臂,具体公开了:包括滑台,所述滑台的内部插设有机械底座,且机械底座的顶部固定安装有机械臂主体,所述机械臂主体的外端固定安装有固定箱,且固定箱的内部插设有连接块,所述连接块的外部固定安装有夹持头,所述连接块的底部固定安装有螺杆,且螺杆插设在固定箱的内部,所述螺杆的外部啮合有螺帽。通过设置有连接块插设在固定箱的内部,使得人员能够快速的对夹持头进行定位,并通过连接块底部固定安装的螺杆穿透在固定箱的内部,使得螺帽能够将连接块紧紧的固定在固定箱的内部,并且能够方便人员对夹持头的快速更换工作,有效节省人员的时间。
3、由上可知,目前现有的机械臂在需要更换夹具时,是先拧动螺帽,将螺帽从螺杆上拧下,随后再将安装有夹持头的连接块从固定箱上取下,即可更换不同的夹持头。但是,该机械臂不能对夹具进行自动更换,当需要更换不同的夹具时,则要工作人员将夹具拆卸下来进行更换,以使得不仅增加了工作人员的工作强度,还影响了机械臂的工作效率。因此,现提供一种用于更换机械臂夹具的衔接装置以解决上述技术问题。
技术实现思路
1、本发明的目的在于针对现有技术的不足提供一种用于更换机械臂夹具的衔接装置,以解决现有机械臂不能自动更换夹具等技术问题。
2、为实现上述目的,本发明的技术方案如下:
3、一种用于更换机械臂夹具的衔接装置,包括机械臂本体,机械臂本体上设有固定块,且固定块上装设有安装块;还包括有设置在安装块底部的支撑块和装设在夹具上的衔接部件,支撑块内部设有空腔,且空腔内部设有用于将衔接部件固定住的锁紧机构;
4、衔接部件包括有固定设在夹具上的连接块,且连接块顶部设有带圆柱状凹槽的凸块,凸块的凹槽内部侧壁上设有若干与锁紧机构配合的卡槽,且卡槽绕凹槽中心点等距布置;
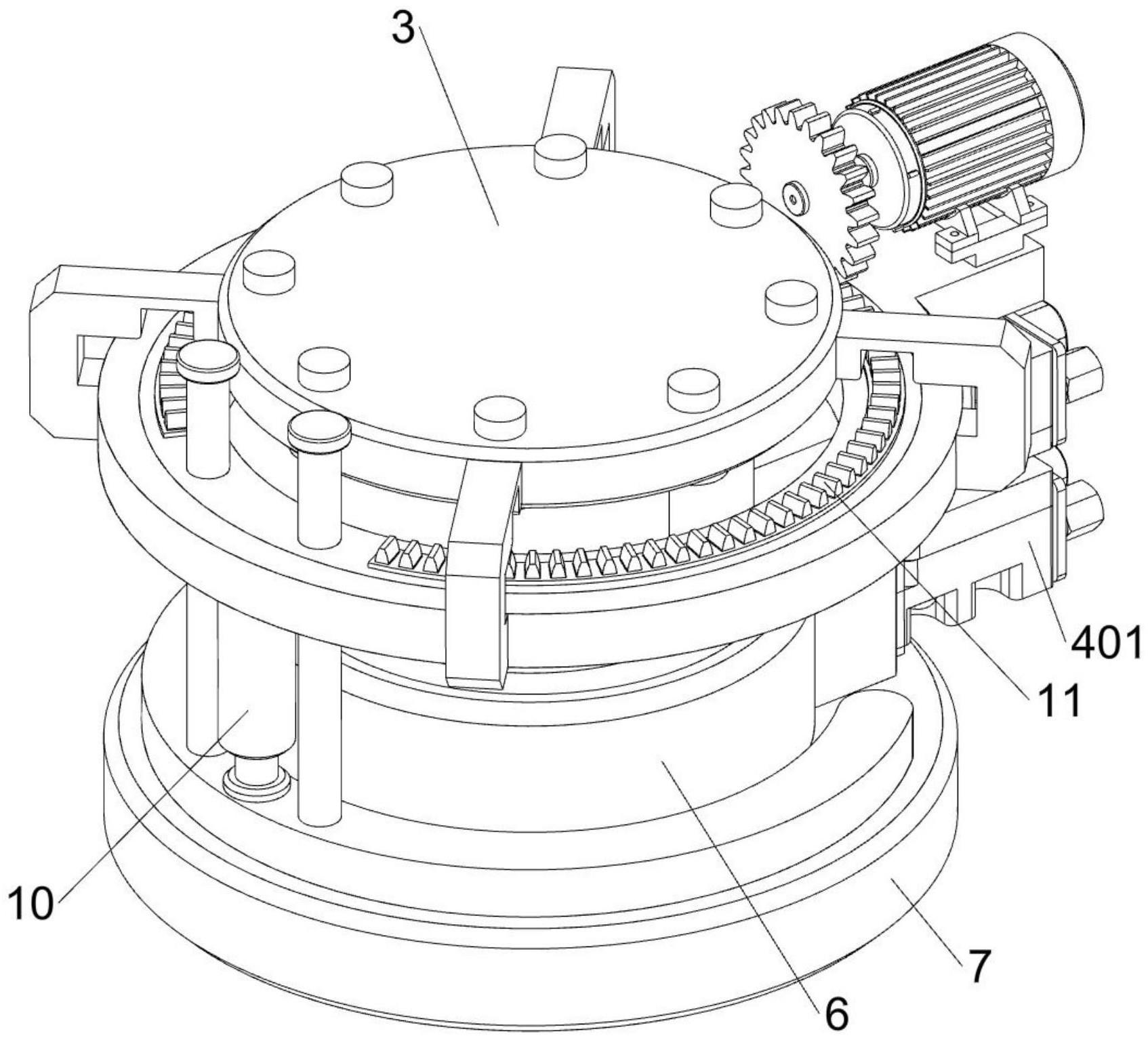
5、安装块上还设有用于吸住连接块的磁吸机构,且磁吸机构上设有对连接块的位置进行调整的调节机构,以使卡杆对准卡槽。
6、进一步,安装块可拆卸的装设在固定块上。
7、进一步,支撑块侧边上设有数据接口。
8、进一步,锁紧机构包括有固定设置在支撑块空腔内部的环形总管和连通设置在环形总管上的连接管,且连接管的一端延伸至支撑块外侧;空腔内部设有数量与卡槽一致的卡紧组件,卡紧组件绕环形总管中心点等距布置且与环形总管连接。
9、进一步,卡紧组件包括有活塞缸和与活塞缸配合使用的活塞杆,活塞缸与环形总管通过支管连通设置;卡紧组件还包括有固定设置在支撑块内部侧壁上的导向杆,且导向杆上滑动设有一端与活塞杆端部固定连接的卡杆,卡杆另一端则延伸至支撑块外侧且卡进卡槽内,卡杆在导向杆上可朝环形总管的径向偏心方向进行滑动。
10、进一步,磁吸机构包括有通过固定杆固定设置在安装块上的环形撑架,环形撑架上转动地设有中心点与凸块上凹槽中心点一致的旋转环,且旋转环上设有可进行竖向滑动的滑杆,滑杆底端上固定设有用于与连接块接触的弧形杆;环形撑架上设有纵向布置的电动推杆,且电动推杆的伸缩杆与弧形杆顶部固定连接;弧形杆底部设有第一磁铁,且连接块顶部设有与第一磁铁配合的第二磁铁。
11、进一步,调节机构包括有固定设置在旋转环顶部的弧形齿带和装设在环形撑架上的步进电机,步进电机的输出轴上设有齿轮,且齿轮与弧形齿带啮合。
12、本发明的有益效果:当需要更换夹具时,控制锁紧机构松开凸块,夹具则自动脱离机械臂本体,再运行机械臂本体,带动支撑块到另一个夹具的上方,使得磁吸机构吸住连接块,随后运行磁吸机构,则带动连接块向上移动,以使得锁紧机构伸入到该夹具上的凸块凹槽内,再启动调节机构,从而调整连接块的位置,以使得凹槽内的卡槽能对准锁紧机构,最后控制锁紧机构卡进卡槽内以锁住凸块,即自动完成夹具的安装,无需工作人员操作,实现自动化,大大提高了夹具更换的效率。
技术特征:
1.一种用于更换机械臂夹具的衔接装置,包括机械臂本体(1),其特征在于:机械臂本体(1)上设有固定块(2),且固定块(2)上装设有安装块(3);还包括有设置在安装块(3)底部的支撑块(4)和装设在夹具上的衔接部件,支撑块(4)内部设有空腔,且空腔内部设有用于将衔接部件固定住的锁紧机构(5);
2.根据权利要求1所述的一种用于更换机械臂夹具的衔接装置,其特征在于:安装块(3)可拆卸的装设在固定块(2)上。
3.根据权利要求1所述的一种用于更换机械臂夹具的衔接装置,其特征在于:支撑块(4)侧边上设有数据接口(401)。
4.根据权利要求1所述的一种用于更换机械臂夹具的衔接装置,其特征在于:锁紧机构(5)包括有固定设置在支撑块(4)空腔内部的环形总管(501)和连通设置在环形总管(501)上的连接管(502),且连接管(502)的一端延伸至支撑块(4)外侧;空腔内部设有数量与卡槽(8)一致的卡紧组件,卡紧组件绕环形总管(501)中心点等距布置且与环形总管(501)连接。
5.根据权利要求4所述的一种用于更换机械臂夹具的衔接装置,其特征在于:卡紧组件包括有活塞缸(504)和与活塞缸(504)配合使用的活塞杆(505),活塞缸(504)与环形总管(501)通过支管(503)连通设置;卡紧组件还包括有固定设置在支撑块(4)内部侧壁上的导向杆(506),且导向杆(506)上滑动设有一端与活塞杆(505)端部固定连接的卡杆(507),卡杆(507)另一端则延伸至支撑块(4)外侧且卡进卡槽(8)内,卡杆(507)在导向杆(506)上可朝环形总管(501)的径向偏心方向进行滑动。
6.根据权利要求1所述的一种用于更换机械臂夹具的衔接装置,其特征在于:磁吸机构(10)包括有通过固定杆(1001)固定设置在安装块(3)上的环形撑架(1002),环形撑架(1002)上转动地设有中心点与凸块(6)上凹槽中心点一致的旋转环(1003),且旋转环(1003)上设有可进行竖向滑动的滑杆(1004),滑杆(1004)底端上固定设有用于与连接块(7)接触的弧形杆(1005);环形撑架(1002)上设有纵向布置的电动推杆(1006),且电动推杆(1006)的伸缩杆与弧形杆(1005)顶部固定连接;弧形杆(1005)底部设有第一磁铁(1007),且连接块(7)顶部设有与第一磁铁(1007)配合的第二磁铁(1008)。
7.根据权利要求6所述的一种用于更换机械臂夹具的衔接装置,其特征在于:调节机构(11)包括有固定设置在旋转环(1003)顶部的弧形齿带(1101)和装设在环形撑架(1002)上的步进电机(1102),步进电机(1102)的输出轴上设有齿轮(1103),且齿轮(1103)与弧形齿带(1101)啮合。
技术总结
本发明涉及机械臂技术领域,尤其涉及一种用于更换机械臂夹具的衔接装置,机械臂本体上设有固定块,且固定块上装设有安装块;还包括有设置在安装块底部的支撑块和装设在夹具上的衔接部件,支撑块内部设有空腔,且空腔内部设有用于将衔接部件固定住的锁紧机构;衔接部件包括有固定设在夹具上的连接块,且连接块顶部设有带圆柱状凹槽的凸块,凸块的凹槽内部侧壁上设有若干与锁紧机构配合的卡槽,且卡槽绕凹槽中心点等距布置;安装块上还设有用于吸住连接块的磁吸机构,且磁吸机构上设有对连接块的位置进行调整的调节机构,以使卡杆对准卡槽。本发明自动完成夹具的安装,无需工作人员操作,实现自动化,大大提高了夹具更换的效率。
技术研发人员:刘照强,黎键,罗锐
受保护的技术使用者:广东博工医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!