一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人与流程
本发明涉及摄像机承载设备,具体的涉及一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人。
背景技术:
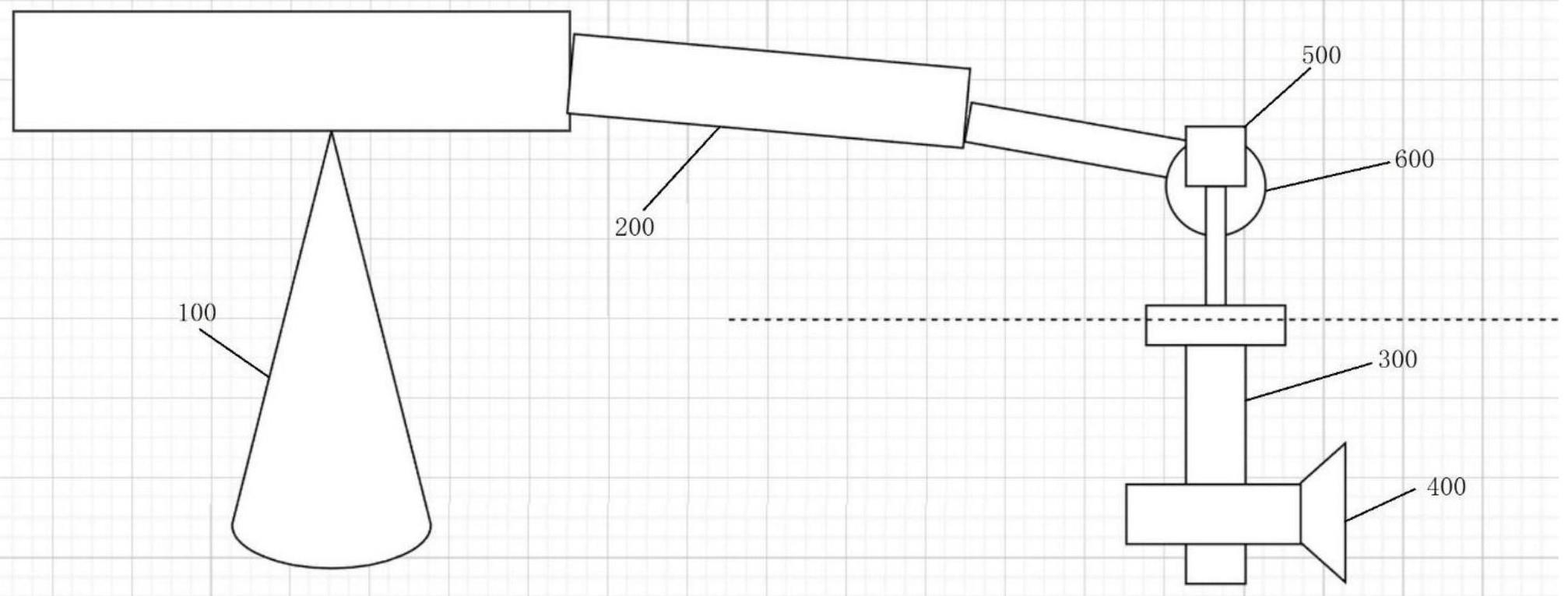
1、摄像机伸缩臂机器人用于在远程遥控拍摄演播室、直播间、教室、会议、户外、舞台剧场等多机位视频的自动化摄像摇臂系统。参见图1所示,现有的摄像机伸缩臂机器人一般包括支撑机构100、伸缩臂身200和摄像机云台构成300,所述伸缩臂身200可转动的设置在支撑机构100上构成杠杆结构,伸缩臂身200的一端设置云台平衡机构600,所述摄像机云台300连接所述云台平衡机构600,另一端装载用于平衡的配重块,摄像机400安装在所述摄像机云台300上,通过操作伸缩臂身200带动摄像机云台300及摄像机400运动从而满足拍摄要求。
2、理想伸缩臂身200的工作模型见图1及图2,将摄像机云台300安装在伸缩臂身200上之后,在伸缩臂身200伸缩过程中,通过监测伸缩臂身200俯仰角a发生改变,云台平衡机构根据所述俯仰角a调节摄像机云台300保持水平位置状态。但是实际情况下,参见图3所示,由于测量俯仰角a的传感器安装在伸缩臂身200的俯仰轴上,并且,伸缩臂身200在伸出长度较大(几米甚至十几米)后,会由于伸缩臂身200本身的重力、摄像机云台300的重力以及摄像机的重力,伸缩臂身200的末端会产生一定的形变而下垂,此时,如果云台平衡机构600继续根据俯仰角a进行角度调整,就会产生一定的角度偏差,使摄像机无法保持水平。如图3所示,角度差b产生的根源,是伸缩臂身200受重力影响产生形变所致。
3、由此可知,现有摄像机伸缩臂机器人的伸缩臂身端部由于重力会产生弯曲形变,从而使得摄像机云台300的实际位置与位置坐标发生偏差,造成摄像机云台300不能到达摄影师想要的拍摄位置坐标,影响拍摄效果。现有修正的方式包括:一,摄影师根据拍摄画面手动控制调整,该方式造成摄影师操作的不便;二、采用具有自动检测和调节功能的摄像机云台,但这种方式极度依赖具有自动检测和调节功能的摄像机云台的检测精度和调节灵敏度,增加设备成本。
4、有鉴于此,特提出本发明专利。
技术实现思路
1、为了解决上述技术问题,本发明提供一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人,能够检测出伸缩臂身端部形变偏差,根据形变偏差进行云台平衡机构的补偿,使摄像机云台保持水平位置状态。
2、具体地,采用了如下技术方案:
3、一种摄像机伸缩臂的位置补偿方法,摄像机伸缩臂包括摄像机云台和多级伸缩臂身,多级伸缩臂身之间可相对滑动连接,末级伸缩臂身的自由端安装云台平衡机构,所述摄像机云台连接所述云台平衡机构,通过控制伸缩臂身相对滑动,实现摄像机伸缩臂的伸缩调节:
4、所述的位置补偿方法包括:
5、在摄像机伸缩臂的伸缩过程中,获取摄像机云台的水平倾斜角度;
6、根据所述水平倾斜角度控制末级伸缩臂身上的云台平衡机构,带动所述摄像机云台进行俯仰调节,针对摄像机云台进行位置补偿,使其处于水平位置状态。
7、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法中,所述的云台平衡机构上设置倾角传感器,所述的倾角传感器用于监测摄像机云台的水平倾斜角度;
8、位置补偿方法中所述在摄像机伸缩臂的伸缩过程中,获取摄像机云台的水平倾斜角度包括:
9、在摄像机伸缩臂的伸缩过程中,实时获取摄像机伸缩臂的伸缩长度l;
10、根据公式c=(l/lmax)*(b-a)实时计算得到摄像机云台的水平倾斜角度c,其中,lmax为摄像机伸缩臂的最长伸出长度,b为摄像机伸缩臂伸出至最长伸出长度lmax时,倾角传感器检测的摄像机云台的水平倾斜角度,a为摄像机伸缩臂缩回至最短伸出长度lmin时,倾角传感器检测的摄像机云台的水平倾斜角度。
11、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法中,所述位置补偿方法包括初始化流程,所述初始化流程在按照输入参数控制摄像机伸缩臂伸缩运动之前执行,用于检测获取摄像机云台位置补偿的初始参数a、b;
12、所述初始化流程包括:
13、控制所述摄像机伸缩臂缩回至最短伸出长度lmin,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为a;
14、控制所述摄像机伸缩臂伸出至最长伸出长度lmax,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为b。
15、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法中,所述初始化流程中,所述摄像机伸缩臂处于最短伸出长度lmin状态时与所述摄像机伸缩臂处于最长伸出长度lmax状态时,控制所述云台平衡机构将所述摄像机云台保持在同一位置状态。
16、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法中,所述初始化流程中控制所述摄像机伸缩臂缩回至最短伸出长度lmin,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为a包括:
17、摄像机伸缩臂接收到控制其缩回至最短伸出长度lmin位置的控制指令;
18、获取摄像机伸缩臂的当前位置状态,控制摄像机伸缩臂进行缩回运动;
19、当所述摄像机伸缩臂缩回至最短伸出长度lmin位置时,且保持最短伸出长度lmin位置状态达到第一预设时间后,再获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为a。
20、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法中,所述初始化流程中控制所述摄像机伸缩臂伸出至最长伸出长度lmax,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为b包括:
21、摄像机伸缩臂接收到控制其伸出至最长伸出长度lmax位置的控制指令;
22、获取摄像机伸缩臂的当前位置状态,控制摄像机伸缩臂进行伸出运动;
23、当所述摄像机伸缩臂伸出至最长伸出长度lmax位置时,且保持最长伸出长度lmax位置状态达到第二预设时间后,再获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为b。
24、作为本发明的可选实施方式,本发明的一种摄像机伸缩臂的位置补偿方法,包括:在摄像机伸缩臂伸缩至伸出长度l的过程中,根据实时计算得到摄像机云台的水平倾斜角度c,控制云台平衡机构实时旋转补偿角度c,使摄像机云台处于水平位置状态。
25、本发明同时提供一种应用所述摄像机伸缩臂的位置补偿方法的摄像机伸缩臂机器人,包括摄像机云台和多级伸缩臂身,多级伸缩臂身之间可相对滑动连接,末级伸缩臂身的自由端安装云台平衡机构,所述摄像机云台连接所述云台平衡机构,通过控制伸缩臂身相对滑动,实现摄像机伸缩臂的伸缩调节:
26、在摄像机伸缩臂的伸缩过程中,获取摄像机云台的水平倾斜角度;
27、根据所述水平倾斜角度控制末级伸缩臂身上的云台平衡机构,带动所述摄像机云台进行俯仰调节,针对摄像机云台进行位置补偿,使其处于水平位置状态。
28、作为本发明的可选实施方式,本发明所述的云台平衡机构上设置倾角传感器,所述的倾角传感器用于监测摄像机云台的水平倾斜角度;
29、在摄像机伸缩臂的伸缩过程中,实时获取摄像机伸缩臂的伸缩长度l;
30、根据公式c=(l/lmax)*(b-a)实时计算得到摄像机云台的水平倾斜角度c,其中,lmax为摄像机伸缩臂的最长伸出长度,b为摄像机伸缩臂伸出至最长伸出长度lmax时,倾角传感器检测的摄像机云台的水平倾斜角度,a为摄像机伸缩臂缩回至最短伸出长度lmin时,倾角传感器检测的摄像机云台的水平倾斜角度。
31、作为本发明的可选实施方式,本发明所述摄像机承载装置内设置初始化流程,所述初始化流程包括:
32、控制所述摄像机伸缩臂缩回至最短伸出长度lmin,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为a;
33、控制所述摄像机伸缩臂伸出至最长伸出长度lmax,获取倾角传感器检测的摄像机云台的水平倾斜角度,记录为b;
34、所述的摄像机承载装置包括设置在末级伸缩臂身上的锁止机构,所述的锁止机构在摄像机承载装置执行初始化流程时锁定所述云台平衡机构,将所述摄像机云台保持在同一位置状态。
35、与现有技术相比,本发明的有益效果:
36、本发明的一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人,考虑到伸缩臂身在伸出以后受到重力作用发生形变这一现实问题,通过在在摄像机伸缩臂的伸缩过程中,获取摄像机云台的水平倾斜角度,再通过云台平衡机构针对水平倾斜角度进行位置补偿,从而使摄像机云台始终处于水平位置状态。这样,本发明的一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人,使得摄像机云台的实际位置能够到达摄影师想要的拍摄位置坐标,摄影师无需手动调整,确保拍摄效果。
37、综上可知,本发明的一种摄像机伸缩臂的位置补偿方法及摄像机伸缩臂机器人,能够检测出伸缩臂身端部形变偏差,根据形变偏差进行补偿,同时可以获取实际位置坐标,反馈给控制系统。
- 还没有人留言评论。精彩留言会获得点赞!