一种基于功能连接与图神经网络的驾驶意图识别方法
本发明涉及自动驾驶及脑电信号处理,具体涉及一种基于功能连接与图神经网络的驾驶意图识别方法。
背景技术:
1、人工智能技术的出现使得自动驾驶技术迅速发展,然而,由于道路环境的复杂性,在缺少人工干预的情况下,完全自动驾驶的实现仍面临着许多困难,就现阶段而言,人机同时控制车辆的情况将长期存在。人机共融技术因此成为这一过度阶段的重要支撑,即自动驾驶系统通过传感器等设备进行车辆与环境、车辆与车辆交互的同时,系统获取驾驶员对环境的感知、决策信息,进一步进行人与系统之间的交互,完成驾驶员与自动驾驶系统的协同作业。驾驶意图作为一种重要的决策信息,可以为自动驾驶系统提供重要的决策支持,驾驶意图准识别的准确性也成为是决定人机共融和自动驾驶的关键问题之一。
2、脑电(electroencephalogram,eeg)信号含有高频神经活动信息,可以充分反应驾驶员的生理和心理状态,从脑电中提取关键信息,不仅可以实现对驾驶员的状态感知,还可以通过搭建神经网络分类器,实现对驾驶意图的分类识别任务,为自动驾驶系统进行决策和感知提供新途径。
3、脑电信号电极之间自然存在着空间拓扑结构以及功能连接关系。驾驶行为同样涉及到大脑的多个区域,在驾驶过程中脑电信号之间的相互作用和功能联系在基于脑电信号的驾驶行为分析中十分重要。现有技术中对驾驶意图进行识别的方法,常通过频域分析、时域分析、时频分析及非线性分析等角度进行分类检测,而脑电信号中的上述空间特征以及各电极之间的功能连接关系往往被忽略,导致部分信息丢失,影响最终检测的准确率。
4、因此,亟需能够综合提取频域、空域及功能连接性多种特征的识别方法,以获得驾驶意图分类检测的最大效益。
技术实现思路
1、本发明旨在提供一种基于功能连接与图神经网络的驾驶意图识别方法,用于解决以上问题。
2、本发明的技术方案是:一种基于功能连接与图神经网络的驾驶意图识别方法,包括:
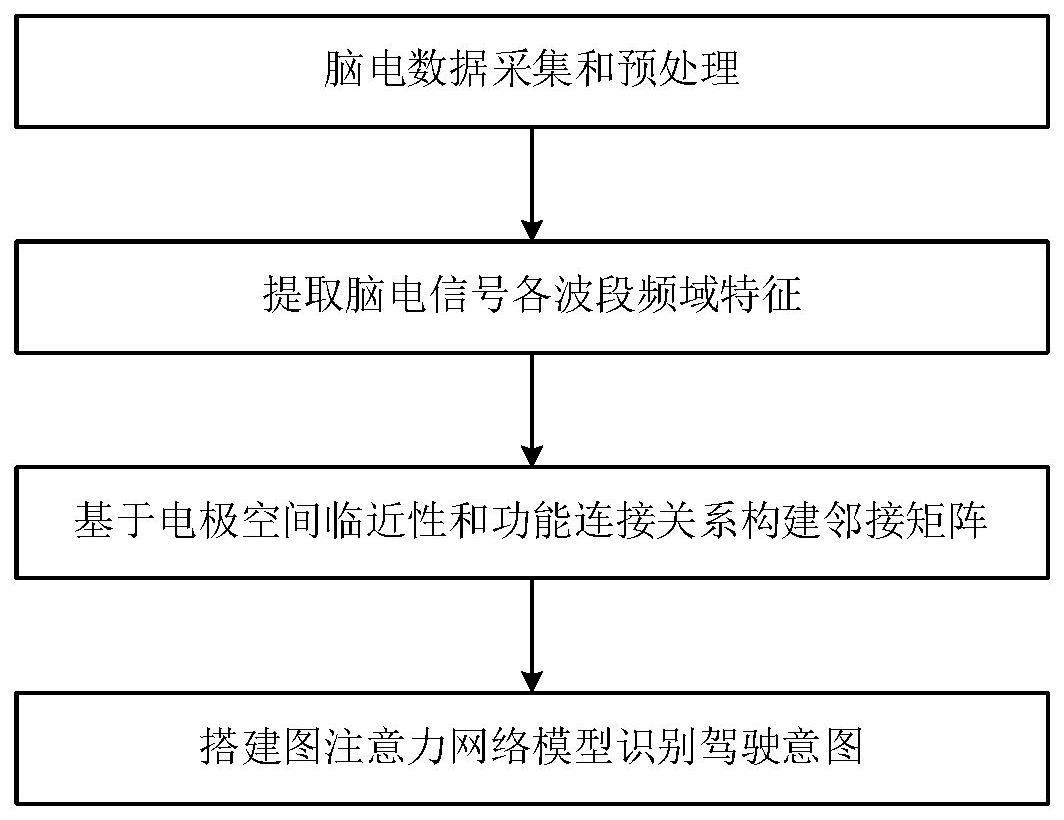
3、步骤s1,采集驾驶员驾驶时的脑电信号,并对原始脑电数据进行预处理;
4、步骤s2,针对预处理后的脑电信号,计算其各频率波段功率谱密度,作为脑电信号频域特征;
5、步骤s3,基于电极空间临近性和功能连接关系构建邻接矩阵作为初始图结构;
6、步骤s4,将步骤s2中频域特征及s3中所得邻接矩阵输入图注意力网络进行特征聚合,提取出的特征表达输入分类器对驾驶意图进行分类并输出结果。
7、优选地,步骤s1具体包括:
8、步骤s11,采集驾驶员匀速行驶和制动两类驾驶行为下的脑电数据,采集到的数据经过0.5hz至70hz的带通滤波处理;
9、步骤s12,利用独立分量分析法去除眼电伪迹成分;
10、步骤s13,剔除损坏电极并通过相邻电极内插值进行补充;
11、步骤s14,原始脑电数据依据匀速行驶和制动两类驾驶意图标签,划分为长为1秒的不重叠的时间窗,并划分训练集和测试集。
12、优选地,步骤s2具体包括:
13、步骤s21,通过快速傅里叶变换将脑电信号分解为五个波段,即delta波段(0.5-3hz),theta波段(4-7hz),alpha波段(8-13hz),beta波段(14-30hz)以及gamma波段(31-70hz);
14、步骤s22,分别计算s21中五个波段上的功率谱密度作为脑电信号的频域特征,功率谱密度计算公式为:
15、
16、式中,s(w)代表对应频段上的功率谱密度;n代表采样次数;δt代表采样周期;fs代表采样频率;x(w)代表s21中各波段脑电信号。
17、优选地,步骤s3具体包括:
18、步骤s31,将电极通道视为空间结构图中的节点,将每对节点进行连接作为网络的边,将欧式距离作为各边上的权重值,通过设定阈值构建空间连接矩阵a0(i,j):
19、
20、式中,a0(i,h)表示空间连接矩阵,dij表示任意两点之间的欧氏距离,threshold表示设定的距离阈值,这里取所有电极间距离的均值;
21、步骤s32,采用相位滞后指数计算各节点之间的关联关系作为各边权重,构建pli矩阵;其中,pli矩阵为相位滞后指数矩阵,通过计算各电极脑电信号之间的相位差异,表示电极间功能连接关系;
22、
23、式中,δφrel(tn)表示tn时间点处电极信号的相位差,n表示时间点数量,sign(number)为符号函数,如果number大于0,则sign返回1;如果number等于0,则sign返回0;如果number小于0,则sign返回-1;
24、步骤s33,通过设定阈值对s32中所得pli矩阵进行二值化处理得到功能连接矩阵a1(i,j);二值化处理具体为:在pli矩阵中,大于阈值的元素设定为1,表示两个电极脑电信号间存在功能连接关系;小于阈值的元素设定为0,表示两个电极脑电信号间不存在功能连接关系;
25、步骤s34,融合大脑各区域的功能连接性及空间临近性,构建最终邻接矩阵a(i,j),具体为:
26、
27、式中,a(i,j)表示最终邻接矩阵,a0(i,j)表示空间连接矩阵,a1(i,j)表示功能邻接矩阵。
28、优选地,步骤s4具体包括:
29、步骤s41,将频域特征及图结构输入图注意力网络进行特征聚合;
30、步骤s42,将特征聚合后得到的特征图通过全连接层展平读出,读出的特征表达z输入softmax层中得到制动、跟车两类驾驶意图分类任务的概率,输出结果为概率值最大的标签编码所代表的任务;其中softmax层具体为:
31、
32、式中,pk表示第k类任务的概率值;z表示输入的特征表达;c表示驾驶意图分类类别数量。
33、步骤s43,选取交叉熵损失作为损失函数,采用adam算法进行梯度下降,对模型进行优化;交叉熵公式如下:
34、
35、式中,c表示驾驶意图分类类别数量;c代表类别序号;pc为分类模型输出的制动、跟车两类驾驶意图标签的概率分布[p1,p2];y代表经独热编码后的真实类别标签,即独热编码后的c维向量,yc表示第c类的真实类别标签。
36、优选地,步骤s43中yc具体计算为:
37、选定第一类为跟车、第二类为制动的两类驾驶意图的分类实验,(c=2),样本真实类别标签为制动,经独热编码后得到标签yc是[0,1];样本真实类别标签为跟车,经独热编码后得到标签yc是[1,0]。
38、优选地,步骤s41具体包括:
39、步骤s411,将节点i、j的特征分别使用向量w做映射,并将其结果拼接,使用前馈神经网络a将拼接向量映射到实数上,用leakyrelu函数激活,得到节点j对节点i的重要性系数eij:
40、
41、其中,表示节点i、j的特征向量;ni表示节点i的所有邻居节点;w、a表示模型中可训练参数;
42、步骤s412,借助邻接矩阵a(i,j)更新重要性系数,即当邻接矩阵元素大于0时,表示两个节点有连接,该位置的重要性系数保留,否则设为负无穷。更新后的重要性系数经softmax归一化后得到节点i与它的邻居节点j∈ni的注意力系数aij:
43、
44、其中,k表示节点i的邻居节点,ni表示节点i的所有邻居节点;
45、步骤s413,得到注意力系数后,采用加权平均的方式对节点i的所有邻居节点j进行特征聚合:
46、
47、其中,h′i表示聚合后节点i的特征向量;hj表示邻居节点j的特征;σ表示向量聚合函数,这里是加权平均;aij表示注意力系数;w为可训练参数。
48、本发明的有益效果在于:解决现有驾驶意图预测方法中提取脑电特征单一且分类模型表达能力较差的问题,提高驾驶意图分类的准确率的同时提高分类结果的可解释性,更好地应用于人机共融驾驶系统的驾驶状态感知和辅助决策。
- 还没有人留言评论。精彩留言会获得点赞!