基于鼻颅镜的导航可视化方法、系统、设备及存储介质与流程
本发明属于图像数据处理领域,具体的说是一种基于鼻颅镜的导航可视化方法、系统、设备及存储介质。
背景技术:
1、在进行脑部肿瘤检测时,通常事先通过ct照射,对肿瘤的大致位置进行识别,将数据采集设备通过患者的鼻腔插入至距离肿瘤安全距离的位置,对肿瘤图片进行视频拍照,但是视频拍摄的只是局部的肿瘤图片,在对肿瘤的全景图片进行拍摄时,通过手动的方式控制数据采集模块的轨迹,无法对数据采集模块的轨迹进行事先规划和预测,这样极易导致数据采集模块在移动的过程与肿瘤发生挤压对肿瘤造成损伤,同时也易导致拍摄视频的质量较低。
2、如授权公告号为cn108921843b的中国专利公开提供一种检测车载导航仪性能的系统,包括图像采集装置,用于获取并发送标准图片;处理器,用于接收标准图片并通过车载导航仪的屏幕显示标准图片;还用于获取车载导航仪的显示图片;将显示图片与标准图片进行比较;若比较结果满足预设条件,则判定车载导航仪合格,否则不合格。可见,该申请的检测车载导航仪性能的系统能够自动检测车载导航仪的性能,无需人工检测,省时省力,检测结果是依据设定的标准得到的,非常可靠,从而提高了检测的准确度。该申请还公开了一种检测车载导航仪性能的方法,与上述检测车载导航仪性能的系统具有相同的有益效果。
3、如申请公开号为cn114877909a的中国专利公开了一种基于单目图片的路径导航方法、装置、设备及存储介质,所述方法获取相机采集的移动载具当前位姿的图片,并根据所述移动载具的可移动范围,在所述图片中确定路径规划区域;根据目标位置在图片坐标系中的点坐标和路径规划算法,在所述路径规划区域内生成所述移动载具到所述目标位置的导航路径。通过上述方法,通过路径规划区域限定用户的路径规划距离,使得移动载具的实际移动距离在可接收的误差范围内,避免因为误差过大导致移动载具偏航过大;通过路径规划算法在图片中的路径规划区域内直接生成导航路径,减小了计算量,加快路径计算速度,且路径显示更加便捷。
4、以上专利均存在本背景技术提出的问题:在进行脑部肿瘤检测时,通常事先通过ct照射,对肿瘤的大致位置进行识别,将数据采集设备通过患者的鼻腔插入至距离肿瘤安全距离的位置,对肿瘤图片进行视频拍照,但是视频拍摄的只是局部的肿瘤图片,在对肿瘤的全景图片进行拍摄时,通过手动的方式控制数据采集模块的轨迹,无法对数据采集模块的轨迹进行事先规划和预测,这样极易导致数据采集模块在移动的过程与肿瘤发生挤压对肿瘤造成损伤,同时也易导致拍摄视频的质量较低,为了解决这些问题,本技术设计了一种基于鼻颅镜的导航可视化方法、系统、设备及存储介质。
技术实现思路
1、针对现有技术的不足,本发明提出了一种基于鼻颅镜的导航可视化方法、系统、设备及存储介质,数据采集设备通过鼻腔插入至鼻颅部肿瘤位置,摄像模块对肿瘤部位进行拍照得到拍摄图像,将拍摄图像导入图像处理策略进行清晰化处理,得到肿瘤部位的清晰图片,将清晰图片代入图像识别策略中,将图片中的肿瘤图像进行提取,对肿瘤轮廓进行识别提取,将肿瘤轮廓导入数据拟合软件中进行轮廓曲线的拟合,得到以摄像模块位置为原点的肿瘤轮廓曲线公式,按照肿瘤轮廓曲线公式规划距离肿瘤轮廓安全距离的路径,数据采集设备按照规划的路径对肿瘤进行数据采集,通过对数据采集设备的路径进行规划,提高了拍摄质量的同时,避免了采集数据时对肿瘤的损伤。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于鼻颅镜的导航可视化方法,其包括以下具体步骤:
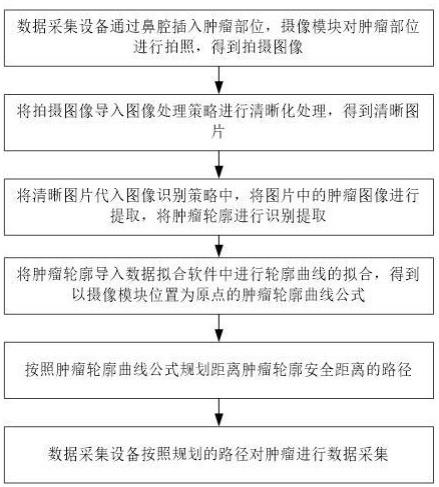
4、s1、数据采集设备通过鼻腔插入至鼻颅部肿瘤位置,摄像模块对肿瘤部位进行拍照得到拍摄图像;
5、s2、将拍摄图像导入图像处理策略进行清晰化处理,得到肿瘤部位的清晰图片;
6、s3、将清晰图片代入图像识别策略中,将图片中的肿瘤图像进行提取,对肿瘤轮廓进行识别提取;
7、s4、将肿瘤轮廓导入数据拟合软件中进行轮廓曲线的拟合,得到以摄像模块位置为原点的肿瘤轮廓曲线公式;
8、s5、按照肿瘤轮廓曲线公式规划距离肿瘤轮廓安全距离的路径;
9、s6、数据采集设备按照规划的路径对肿瘤进行数据采集。
10、具体的,所述s1的具体步骤为:
11、s101、事先通过ct照射,对肿瘤的大致位置进行识别,将数据采集设备通过患者的鼻腔插入至距离肿瘤安全距离的位置;
12、s102、摄像模块在距离肿瘤安全距离的位置对肿瘤部位进行拍照,得到肿瘤部位的拍摄图片。
13、具体的,所述s2的图像处理策略包括以下具体步骤:
14、s201、将拍摄的肿瘤部位的拍摄图片的每个像素的至少一个颜色通道的强度进行提取,构成有雾颜色强度集合,同时通过湿度检测组件得到拍摄位置的湿度,通过温度检测组件得到拍摄位置的温度,通过距离采集模块采集摄像模块至肿瘤位置的距离数据;
15、s202、将有雾颜色强度集合、摄像模块至肿瘤位置的距离数据、拍摄位置的温度数据和拍摄位置的湿度数据作为构建的机器学习模型的输入,获得机器学习模型输出的无雾清晰图片。
16、具体的,所述s202中机器学习模型的训练方式为:
17、s2021、使用摄像模块分别在有雾和无雾环境下获取肿瘤图像,得到至少一组有雾拍摄图片和无雾清晰图片,同时获得至少一组拍摄位置的湿度、拍摄位置的温度和摄像模块至肿瘤位置的距离数据;
18、s2022、将有雾拍摄图片、拍摄位置的湿度、拍摄位置的温度和摄像模块至肿瘤位置的距离数据组合为特征向量的形式,所有特征向量的集合作为机器学习模型的输入,所述机器学习模型以每组特征向量预测的无雾清晰图片作为输出,以每组特征向量对应的实际的无雾清晰图片作为预测目标,以最小化所有预测的无雾清晰图片预测准确度之和作为训练目标;
19、s2023、预测准确度的计算公式为:,其中下标i为特征向量的组数,上标j为拍摄图片中第j个像素,m为预测的无雾清晰图片,m为拍摄的无雾清晰图片,n为拍摄图片的像素点总数,为第i组特征向量预测的无雾清晰图片与拍摄的无雾清晰图片之间的预测准确度,对机器学习模型进行训练,直至预测准确度之和达到收敛时停止训练;
20、其中,所述机器学习模型为深度神经网络模型或深度信念网络模型中的任意一种。
21、具体的,所述s3中的图像识别策略的具体步骤为:
22、s301、将经过清晰化处理后得到的图像导入灰度化处理软件中,对图像进行灰度化处理,得到灰度化处理图像;
23、s302、对灰度化处理图像进行像素点的划分,计算每个像素点的灰度值与上面的相邻像素点的灰度值的差值,得到所述像素点的垂直梯度值,计算每个像素点的灰度值与左侧的相邻像素点的灰度值的差值,得到所述像素点的水平梯度值;
24、s303、将垂直梯度值和水平梯度值分别与梯度阈值进行对比,将垂直梯度值和水平梯度值大于梯度阈值的对应的像素点连线作为边界,将灰度化处理图像划分为至少一个区域,获取这些区域的清晰化处理后的图像,将这些区域图像的颜色和形态进行提取,与储存的肿瘤颜色和形态导入相似度对比公式中计算这些区域图像与肿瘤图像的相似度,以对肿瘤位置进行定位,对图片中的肿瘤轮廓进行提取。
25、具体的,所述s4的具体步骤为:
26、s401、将拍摄的肿瘤轮廓图片和轮廓至摄像模块的距离,导入三维模型构建软件中构建肿瘤轮廓图片对应的肿瘤三维图像,将肿瘤三维图像和对应的摄像模块的位置进行提取;
27、s402、以肿瘤三维图像和对应的摄像模块最近点之间的连线作为x轴,以x轴所在水平面内与x轴垂直的线为y轴,将肿瘤三维图像和对应的摄像模块的位置导入数据拟合软件中进行轮廓曲线的拟合,得到以摄像模块的位置为原点的肿瘤轮廓曲线公式,其中,为肿瘤三维图像的根部相对于摄像模块的位置坐标。
28、具体的,所述s5的具体步骤为:
29、s501、对肿瘤轮廓曲线进行采集,求肿瘤轮廓曲线各点的切线方程,其中为肿瘤轮廓曲线在点的导数值,其中为肿瘤根部图像在点的切线上的点,求与肿瘤轮廓曲线各点的切线垂直且经过对应的各切点的方程,的方程表达式为,化简得到,其中为与肿瘤轮廓曲线在点的切线垂直且经过的线的方程的点;
30、s502、求上与切点相差设定的安全距离d的点的轨迹方程,计算过程为:,,将其代入得到路径规划轨迹方程,且将轨迹计算后,将位于肿瘤内部的轨迹点去除。
31、一种基于鼻颅镜的导航可视化系统,其基于上述一种基于鼻颅镜的导航可视化方法实现,其包括控制模块、摄像模块、图像处理模块、轮廓拟合模块、路径规划模块和显示模块,所述控制模块用于控制数据采集设备按照规划的路径运行,所述摄像模块用于对肿瘤部位进行拍照得到拍摄图像,所述图像处理模块用于将拍摄图像导入图像处理策略进行清晰化处理,得到肿瘤部位的清晰图片,所述轮廓拟合模块用于将肿瘤轮廓导入数据拟合软件中进行轮廓曲线的拟合,得到以摄像模块位置为原点的肿瘤轮廓曲线公式,所述路径规划模块用于按照肿瘤轮廓曲线公式规划距离肿瘤轮廓安全距离的路径,所述显示模块用于对摄像模块的摄像肿瘤视频进行实时显示。
32、一种电子设备,包括:服务器、采集终端和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;所述采集终端采集图像数据,所述服务器通过调用所述存储器中存储的计算机程序,执行上述的一种基于鼻颅镜的导航可视化方法。
33、一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机执行上述的一种基于鼻颅镜的导航可视化方法。
34、与现有技术相比,本发明的有益效果是:
35、数据采集设备通过鼻腔插入至鼻颅部肿瘤位置,摄像模块对肿瘤部位进行拍照得到拍摄图像,将拍摄图像导入图像处理策略进行清晰化处理,得到肿瘤部位的清晰图片,将清晰图片代入图像识别策略中,将图片中的肿瘤图像进行提取,对肿瘤轮廓进行识别提取,将肿瘤轮廓导入数据拟合软件中进行轮廓曲线的拟合,得到以摄像模块位置为原点的肿瘤轮廓曲线公式,按照肿瘤轮廓曲线公式规划距离肿瘤轮廓安全距离的路径,数据采集设备按照规划的路径对肿瘤进行数据采集,通过对数据采集设备的路径进行规划,提高了拍摄质量的同时,避免了采集数据时对肿瘤的损伤。
- 还没有人留言评论。精彩留言会获得点赞!