一种基于激光雷达的车轴识别方法及系统与流程
本公开涉及交通治超、人工智能领域,尤其涉及机器学习领域,具体涉及一种基于激光雷达的车轴识别方法及系统。
背景技术:
1、在智慧交通领域,路面交通管控中的治超问题是重点治理的环节,货车一旦超载,轻则路面损毁,重则桥梁垮塌,给人民生命安全和财产带来损失和风险。对于治超管理,交通运输部门发布的规范中,要求管控区域的路口监测检测车辆轴数和轴型。以往的治超工作中,通过人工对车轴进行识别记录,效率较低。随着智慧交通的发展应用,在各监测站点开始引入激光雷达进行车轴识别,效率高,节约了人工,但是准确性容易受到外界干扰,例如车辆遮挡物或外物进入激光探测区域引起的激光探距误差。车轴智能识别的准确性一方面受限于检测识别算法,另一方面受限于芯片的成本和算力,而随着国产人工智能加速芯片(如gpgpu、tpu)的不断涌出,芯片成本降低的同时,算力得到了较大的提升,借助加速芯片的加速能力,研发出一种更高检测精度的车轴识别方法是亟待解决的技术问题。
技术实现思路
1、本公开提供了一种基于激光雷达的车轴识别方法及系统。
2、根据本公开的一方面,提供了一种基于激光雷达的车轴识别方法,应用于计算机设备,所述方法包括:
3、获取目标车轴图像和与所述目标车轴图像对应的车轴激光扫描模型图,所述车轴激光扫描模型图通过激光扫描传感器检测的车轴外廓特征信息建模得到;
4、对所述车轴激光扫描模型图进行特征提取,得到模型图特征矩阵,并对所述目标车轴图像进行特征提取,得到实际图特征矩阵;
5、将所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到目标交互特征矩阵;
6、通过所述目标交互特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的初始目标检测结果;
7、通过所述实际图特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的优化目标检测结果;
8、通过所述优化目标检测结果,对所述初始目标检测结果进行优化,得到所述目标车轴图像中的车轴识别结果;
9、其中,所述优化目标检测结果及所述初始目标检测结果的个数不少于一个,所述通过所述优化目标检测结果对所述初始目标检测结果进行优化,得到所述目标车轴图像中的车轴识别结果,包括:
10、针对各个所述优化目标检测结果,将所述优化目标检测结果分别与各所述初始目标检测结果进行对照,得到对照结果;所述对照结果指示在不少于一个初始目标检测结果中,是否具有与所述优化目标检测结果相同的初始目标检测结果;
11、当所述对照结果指示具有与所述优化目标检测结果相同的初始目标检测结果,将与所述优化目标检测结果相同的初始目标检测结果确定为所述目标车轴图像中的备选检测结果;
12、当所述对照结果指示没有与所述优化目标检测结果相同的初始目标检测结果,将所述图像块实际图特征矩阵和融合图像块特征矩阵进行矩阵连接,得到合并特征矩阵;
13、通过所述合并特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的备选检测结果;
14、通过车轴轴型特征集对所述备选检测结果进行轴型修正,得到所述目标车轴图像中的车轴识别结果。
15、作为一种实施方式,所述特征交互通过特征交互算子完成;所述特征交互算子包括第一特征交互算子、第二特征交互算子和第三特征交互算子;所述将所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到目标交互特征矩阵,包括:
16、通过所述第一特征交互算子,对所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到第一交互特征矩阵;
17、通过所述第二特征交互算子,对所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到第二交互特征矩阵;
18、通过所述第三特征交互算子,对所述实际图特征矩阵和所述第一交互特征矩阵进行特征交互,得到第三交互特征矩阵;
19、对所述第三交互特征矩阵和所述第二交互特征矩阵进行偏心调节后求和,得到偏心融合特征矩阵;
20、将所述偏心融合特征矩阵和所述第三交互特征矩阵进行矩阵连接,得到所述目标交互特征矩阵。
21、作为一种实施方式,所述第一特征交互算子包括多头映射融合算子、梯度优化算子和感知机;所述通过所述第一特征交互算子,对所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到第一交互特征矩阵,包括:
22、通过所述多头映射融合算子对所述模型图特征矩阵及所述实际图特征矩阵进行特征交互,得到第四交互特征矩阵;
23、通过所述梯度优化算子对所述第四交互特征矩阵和所述模型图特征矩阵进行跳跃误差连接,得到跳跃误差连接结果;
24、通过所述感知机对所述跳跃误差连接结果进行感知操作,得到感知结果;
25、通过所述梯度优化算子对所述感知结果和所述跳跃误差连接结果进行跳跃误差连接,得到所述第一交互特征矩阵。
26、作为一种实施方式,所述通过所述多头映射融合算子,对所述模型图特征矩阵及所述实际图特征矩阵进行特征交互,得到第四交互特征矩阵,包括:
27、将所述模型图特征矩阵确定为所述第一特征交互算子的输入矩阵表示,并将所述实际图特征矩阵分别确定为所述第一特征交互算子的查询信息矩阵和输出加权信息矩阵;
28、通过所述多头映射融合算子对所述输入矩阵表示、所述查询信息矩阵和所述输出加权信息矩阵进行特征交互,得到所述第四交互特征矩阵;
29、所述通过所述梯度优化算子对所述第四交互特征矩阵和所述模型图特征矩阵进行跳跃误差连接,得到跳跃误差连接结果,包括:
30、通过所述梯度优化算子对所述第四交互特征矩阵和所述输入矩阵表示进行跳跃误差连接,得到所述跳跃误差连接结果。
31、作为一种实施方式,所述第二特征交互算子、所述第三特征交互算子和所述第一特征交互算子的算子结构相同;所述通过所述第二特征交互算子对所述模型图特征矩阵和所述实际图特征矩阵进行特征交互,得到第二交互特征矩阵,包括:
32、将所述实际图特征矩阵确定为第二特征交互算子的输入矩阵表示,将所述模型图特征矩阵分别确定为所述第二特征交互算子的查询信息矩阵和输出加权信息矩阵;
33、通过所述第二特征交互算子,对所述输入矩阵表示、所述查询信息矩阵和所述输出加权信息矩阵进行特征交互,得到第二交互特征矩阵;
34、所述通过所述第三特征交互算子,对所述实际图特征矩阵和所述第一交互特征矩阵进行特征交互,得到第三交互特征矩阵,包括:
35、将所述实际图特征矩阵确定为第三特征交互算子的输入矩阵表示,将所述第一交互特征矩阵分别确定为所述第三特征交互算子的查询信息矩阵和输出加权信息矩阵;
36、通过所述第三特征交互算子对所述输入矩阵表示、所述查询信息矩阵和所述输出加权信息矩阵进行特征交互,得到第三交互特征矩阵;
37、所述对所述第三交互特征矩阵和所述第二交互特征矩阵进行偏心调节后求和,得到偏心融合特征矩阵,包括:
38、获取所述第三交互特征矩阵的第一偏心系数,以及所述第二交互特征矩阵的第二偏心系数;
39、将所述第三交互特征矩阵和所述第一偏心系数进行偏心计算,得到第一偏心调节值;
40、将所述第二交互特征矩阵和所述第二偏心系数进行偏心计算,得到第二偏心调节值;
41、将所述第一偏心调节值和所述第二偏心调节值进行相加,得到相加结果;
42、对所述相加结果进行正规化,得到正规化特征矩阵;
43、将所述正规化特征矩阵和所述第二交互特征矩阵相乘,得到所述偏心融合特征矩阵。
44、作为一种实施方式,所述目标交互特征矩阵包括所述目标车轴图像中的各个图像块对应的融合图像块特征矩阵,所述通过所述目标交互特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的初始目标检测结果,包括:
45、针对所述目标车轴图像中的各个图像块对应的融合图像块特征矩阵,通过所述融合图像块特征矩阵,对所述图像块进行车轴类型预估,得到所述图像块分别对应各类型的初始类型支持系数;
46、将数值最大的所述初始类型支持系数对应的类型作为所述图像块对应的初始类型;
47、如果所述初始类型指示所述图像块是车轴图像块时,获取所述车轴图像块的车轴类型,将所述图像块确定为所述目标车轴图像中对应所述车轴类型的初始目标检测结果。
48、作为一种实施方式,所述实际图特征矩阵包括所述目标车轴图像中的各个图像块对应的图像块实际图特征矩阵,所述通过所述实际图特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的优化目标检测结果,包括:
49、针对所述目标车轴图像中的各个图像块对应的图像块实际图特征矩阵,通过所述图像块实际图特征矩阵,对所述图像块进行车轴类型预估,得到所述图像块分别对应各类型的优化类型支持系数;
50、将数值最大的所述优化类型支持系数对应的类型作为所述图像块对应的优化类型;
51、如果所述优化类型指示所述图像块是车轴图像块时,获取所述车轴图像块的车轴类型,将所述图像块确定为所述目标车轴图像中对应所述车轴类型的优化目标检测结果。
52、作为一种实施方式,所述合并特征矩阵包括所述目标车轴图像中的各个图像块对应的图像块合并特征矩阵,所述通过所述合并特征矩阵对所述目标车轴图像进行目标检测,得到所述目标车轴图像中的备选检测结果,包括:
53、针对所述目标车轴图像中的各个图像块对应的图像块合并特征矩阵,通过所述图像块合并特征矩阵对所述图像块进行车轴类型预估,得到所述图像块分别对应各类型的目标类型支持系数;
54、将数值最大的所述目标类型支持系数对应的类型作为所述图像块对应的目标类型;
55、当所述目标类型指示所述图像块是车轴图像块时,获取所述车轴图像块的车轴类型,将所述图像块确定为所述目标车轴图像中对应所述车轴类型的备选检测结果。
56、作为一种实施方式,所述对所述目标车轴图像进行特征提取,得到实际图特征矩阵,包括:
57、确定所述目标车轴图像中各个图像块对应的自相关特征矩阵、原始图像块特征矩阵和分布特征矩阵;
58、将所述自相关特征矩阵、所述原始图像块特征矩阵和所述分布特征矩阵进行加法运算,得到融合特征矩阵;
59、对所述融合特征矩阵进行特征提取,得到所述实际图特征矩阵;
60、所述对所述车轴激光扫描模型图进行特征提取,得到模型图特征矩阵,包括:
61、获取所述实际图特征矩阵的秩,并通过所述实际图特征矩阵的秩,对所述车轴激光扫描模型图进行大小调节,得到归一化模型图;
62、对所述归一化模型图进行特征提取,得到与所述实际图特征矩阵相同秩的模型图特征矩阵。
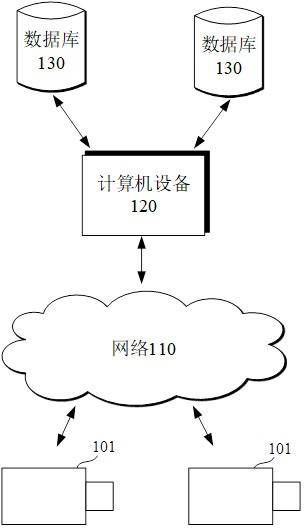
63、根据本公开的另一方面,提供了一种车轴识别系统,包括激光检测仪、摄像设备和计算机设备,所述计算机设备与所述激光检测仪和摄像设备通信连接,以接收所述激光检测仪和摄像设备的信号,所述计算机设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行以上所述的方法。
64、本公开至少包括如下有益效果:
65、本公开结合目标车轴图像和与目标车轴图像对应的车轴激光扫描模型图,确定目标交互特征矩阵,通过目标交互特征矩阵对目标车轴图像进行目标检测,如此精准得到目标车轴图像中的初始目标检测结果,因为获得的初始目标检测结果全面分析了与目标车轴图像对应的车轴激光扫描模型图,车轴激光扫描模型图的语义协助对目标车轴图像进行目标检测,以此大大增加了获得的初始目标检测结果的准确性。同时,通过实际图特征矩阵对目标车轴图像进行目标检测,得到优化目标检测结果,通过优化目标检测结果对联合了车轴激光扫描模型图的语义的初始目标检测结果进行优化,得到目标车轴图像中的车轴识别结果。首先基于联合对应的车轴激光扫描模型图进行目标检测,以极大增加目标检测的准确性,其次通过优化目标检测结果对初始目标检测结果的误检情况进行优化,得到车轴识别结果,如此再次增加目标检测的准确性。
66、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!