一种限速条件下基于时序轨迹数据的驾驶风格分类方法
本发明涉及智能交通,特别是涉及一种限速条件下基于时序轨迹数据的驾驶风格分类方法。
背景技术:
1、随着数字化技术的快速发展及其在各行各业普及应用,公众对高速公路服务智能化、智慧化的期待和需求,越来越迫切,然而由于驾驶人个性和驾驶习惯的差异性,不同驾驶人的驾驶需求存在个性化差异,如何利用现代科学技术对高速公路使用者的个性化需求提供个性化服务是未来高速公路服务及技术升级的重要方向。
2、随着交通传感技术的发展,特别是毫米波雷达激光雷达等高精度传感器的成本逐渐降低,其适用范围逐步扩大到交通领域,特别是近些年来交通雷达的应用逐渐推广,全时空高精度车辆轨迹感知技术逐步成为可能,为构建一个万物互联的交通数字孪生世界提供了一个可靠可行的技术路径。数字孪生指的是对物理系统的虚拟映射,为高可信度的微观交通分析提供了新的解决思路和高精度的分析手段,使得复杂路况下的高精度微观交通分析成为可能。另一方面,随着机器学习、深度学习等人工智能技术的发展,以及算力的逐步提高,数据分析逐步向精细化方向发展,曾经的驾驶风格分析方法多基于断面交通流数据以及交通流特征参数数据,驾驶风格分类特征差且传统驾驶风格分类依赖车载数据采集方式以及驾驶模拟采集方式导致数据量有限驾驶风格样本量不足,传统驾驶风格识别方法容易受数据形式影响。
技术实现思路
1、为了克服现有技术的不足,本发明的目的是提供一种限速条件下基于时序轨迹数据的驾驶风格分类方法。本发明解决了传统驾驶风格分类采用断面交通流参数导致驾驶风格分类特征差的问题,同时解决了传统驾驶风格分类依赖车载数据采集方式以及驾驶模拟采集方式导致的数据量有限驾驶风格样本量不足的问题。
2、为实现上述目的,本发明提供了如下方案:
3、一种限速条件下基于时序轨迹数据的驾驶风格分类方法,包括:
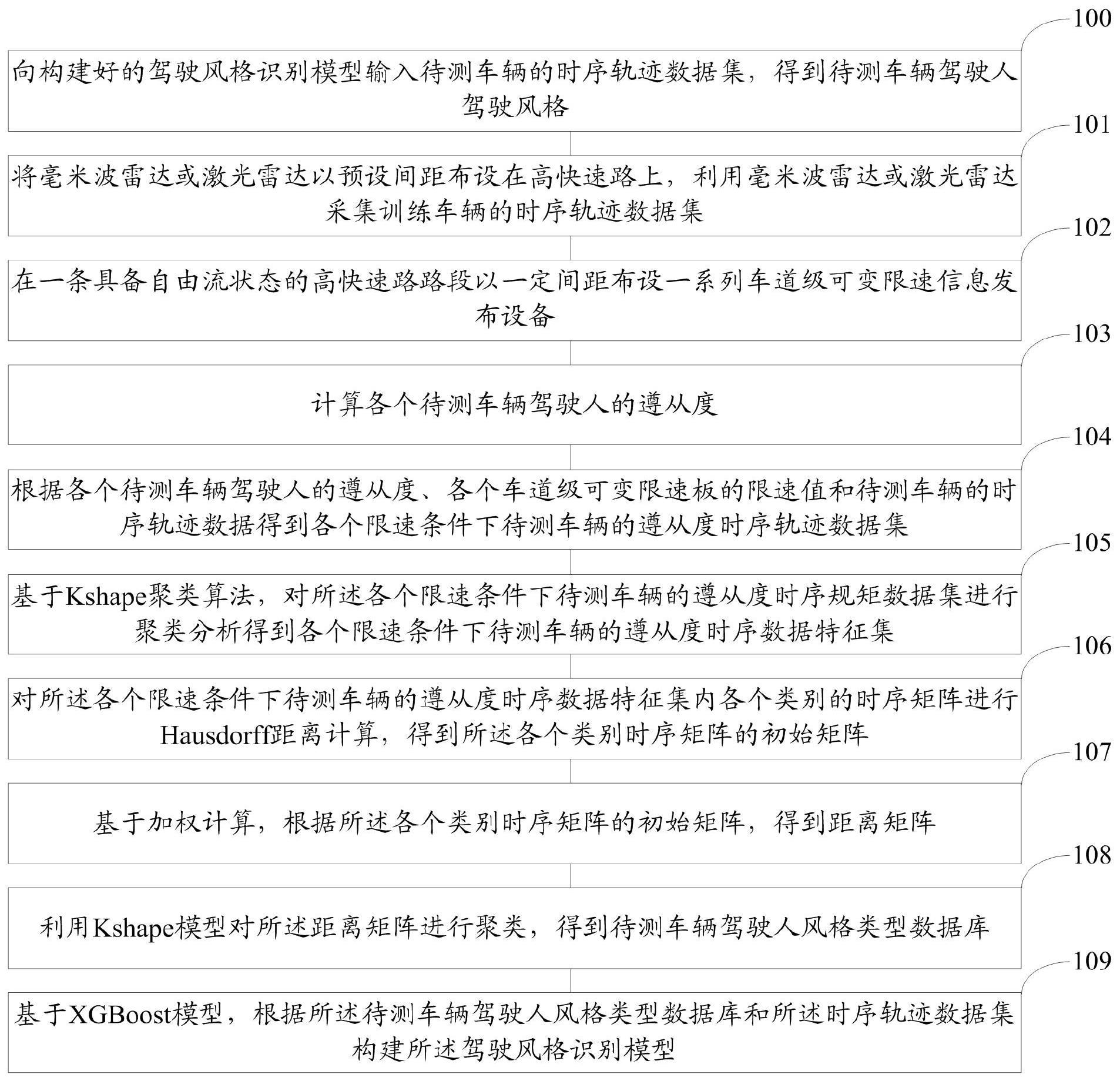
4、向构建好的驾驶风格识别模型输入待测车辆的时序轨迹数据集,得到待测车辆驾驶人驾驶风格;
5、其中,所述驾驶风格识别模型的构建方法为:
6、将毫米波雷达或激光雷达以预设间距布设在高快速路上,利用毫米波雷达或激光雷达采集训练车辆的时序轨迹数据集;
7、将车道级可变限速板以预设间距布设在高快速路上,基于预设控制策略,利用预设的可变信息系统发布控制相应的车道级限速控制指令,调整车道级可变限速板的限速值,得到各个车道级可变限速板的限速值;
8、计算各个待测车辆驾驶人的遵从度;
9、根据各个待测车辆驾驶人的遵从度、各个车道级可变限速板的限速值和待测车辆的时序轨迹数据得到各个限速条件下待测车辆的遵从度时序轨迹数据集;
10、基于kshape聚类算法,对所述各个限速条件下待测车辆的遵从度时序规矩数据集进行聚类分析得到各个限速条件下待测车辆的遵从度时序数据特征集;
11、对所述各个限速条件下待测车辆的遵从度时序数据特征集内各个类别的时序矩阵进行hausdorff距离计算,得到所述各个类别时序矩阵的初始矩阵;
12、基于加权计算,根据所述各个类别时序矩阵的初始矩阵,得到距离矩阵;
13、利用kshape模型对所述距离矩阵进行聚类,得到待测车辆驾驶人风格类型数据库;
14、基于xgboost模型,根据所述待测车辆驾驶人风格类型数据库和所述时序轨迹数据集构建所述驾驶风格识别模型。
15、优选地,所述利用毫米波雷达或激光雷达采集待测车辆的时序轨迹数据集,包括:
16、在所述高速快路两侧以预设距离布设若干个毫米波雷达或激光雷达,所述预设距离小于两个毫米波雷达或激光雷达的扫描范围;
17、利用所述毫米波雷达或激光雷达集待测车辆的时序轨迹数据集。
18、优选地,所述各个待测车辆驾驶人的遵从度的计算公式为:
19、
20、其中,compratei(t)为t时刻i车的遵从度,为i车在接受车道级可变限速板位置处上游250m处的速度,为i车在接受车道级可变限速板位置处下游200m处的速度,vsli(t)为t时刻对i车发布的可变限速值。
21、优选地,所述根据各个待测车辆驾驶人的遵从度、各个车道级可变限速板的限速值和待测车辆的时序轨迹数据得到各个限速条件下待测车辆的遵从度时序轨迹数据集,包括:
22、对所述各个待测车辆驾驶人的遵从度进行遵从度等级区分,得到高遵从度、中遵从度和低遵从度;
23、根据所述高遵从度、中遵从度、低遵从度、各个车道级可变限速板的限速值和待测车辆的时序轨迹数据得到各个限速条件下待测车辆的遵从度时序轨迹数据集。
24、优选地,所述对所述各个限速条件下待测车辆的遵从度时序数据特征集内各个类别的时序矩阵进行hausdorff距离计算,得到所述各个类别时序矩阵的初始矩阵,包括:
25、提取所述各个限速条件下待测车辆的遵从度时序数据特征集内各个类别的时序矩阵,所述各个类别的时序矩阵包括:速度时序矩阵、规矩时序矩阵、加速度时序矩阵和jerk时序矩阵;
26、对所述速度时序矩阵、规矩时序矩阵、加速度时序矩阵和jerk时序矩阵进行hausdorff距离计算,得到所述各个类别时序矩阵的初始矩阵。
27、优选地,所述得到距离矩阵的计算公式为:
28、distancemat
29、=w0*distancemat_tra+w1*distancemat_speed+w2*
30、distancemat_acc+w3*distancemat_jerk;
31、其中,distancemat_tra为positionx,positiony的双向hausdorff距离,distancemat_speed为velocityx,velocityy的双向hausdorff距离,distancemat_acc为accx,accy的双向hausdorff距离,distancemat_jerk为jerk的单向hausdorff距离,其中positionx为车辆的纵向位置,positiony为车辆的横向位置,velocityx为车辆的纵向速度,velocityy为车辆的横向速度,accx为车辆的纵向加速度,accy为车辆的横向加速度,jerk为车辆的纵向jerk值,其中w0,w1,w2,w3为加权系数,w0+w1+w2+w3=1。
32、优选地,所述利用kshape模型对所述距离矩阵进行聚类,得到待测车辆驾驶人风格类型数据库,包括:
33、结合待测车辆驾驶人遵从度将驾驶人分别激进高遵从度、耐心高遵从度、小心高遵从度、激进中遵从度、耐心中遵从度、小心中遵从度、激进低遵从度、耐心低遵从度和小心低遵从度;
34、根据所述激进高遵从度、耐心高遵从度、小心高遵从度、激进中遵从度、耐心中遵从度、小心中遵从度、激进低遵从度、耐心低遵从度和小心低遵从度构建待测车辆驾驶人风格类型数据库。
35、优选地,所述基于xgboost模型,根据所述待测车辆驾驶人风格类型数据库和所述时序轨迹数据集构建所述驾驶风格识别模型,包括:
36、对所述时序轨迹数据集进行降维处理,得到降维后的时序轨迹数据集;
37、根据所述降维后的时序轨迹数据集和所述待测车辆驾驶人风格类型数据库构建所述驾驶风格识别模型。
38、根据本发明提供的具体实施例,本发明公开了以下技术效果:
39、本发明提供了一种限速条件下基于时序轨迹数据的驾驶风格分类方法,本发明通过考虑了车道级限速并利用了时序轨迹数据构建驾驶风格识别模型,利用驾驶风格识别模型预测驾驶人员驾驶风格,提升了风格预测分类的准确性。
- 还没有人留言评论。精彩留言会获得点赞!