遥感建筑解译的快速规则化方法、装置、设备及存储介质与流程
本发明涉及遥感图像识别,尤其涉及一种遥感建筑解译的快速规则化方法、装置、设备及存储介质。
背景技术:
1、语义分割、实例分割算法在遥感地物解译中应用广泛,特别是建筑的提取。遥感图像经过实例分割算法可以得到单个建筑的掩膜,提取轮廓后存在形状不规则、边缘锯齿状、不能准确的体现出建筑物轮廓形状和大小等问题,难以直接应用于规划和灾害评估等建筑制图中。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种遥感建筑解译的快速规则化方法、装置、设备及存储介质,旨在解决现有技术对遥感图像分割后的图像无法准确体现出建筑物轮廓和大小的技术问题。
2、为实现上述目的,本发明提供了一种遥感建筑解译的快速规则化方法,所述方法包括以下步骤:
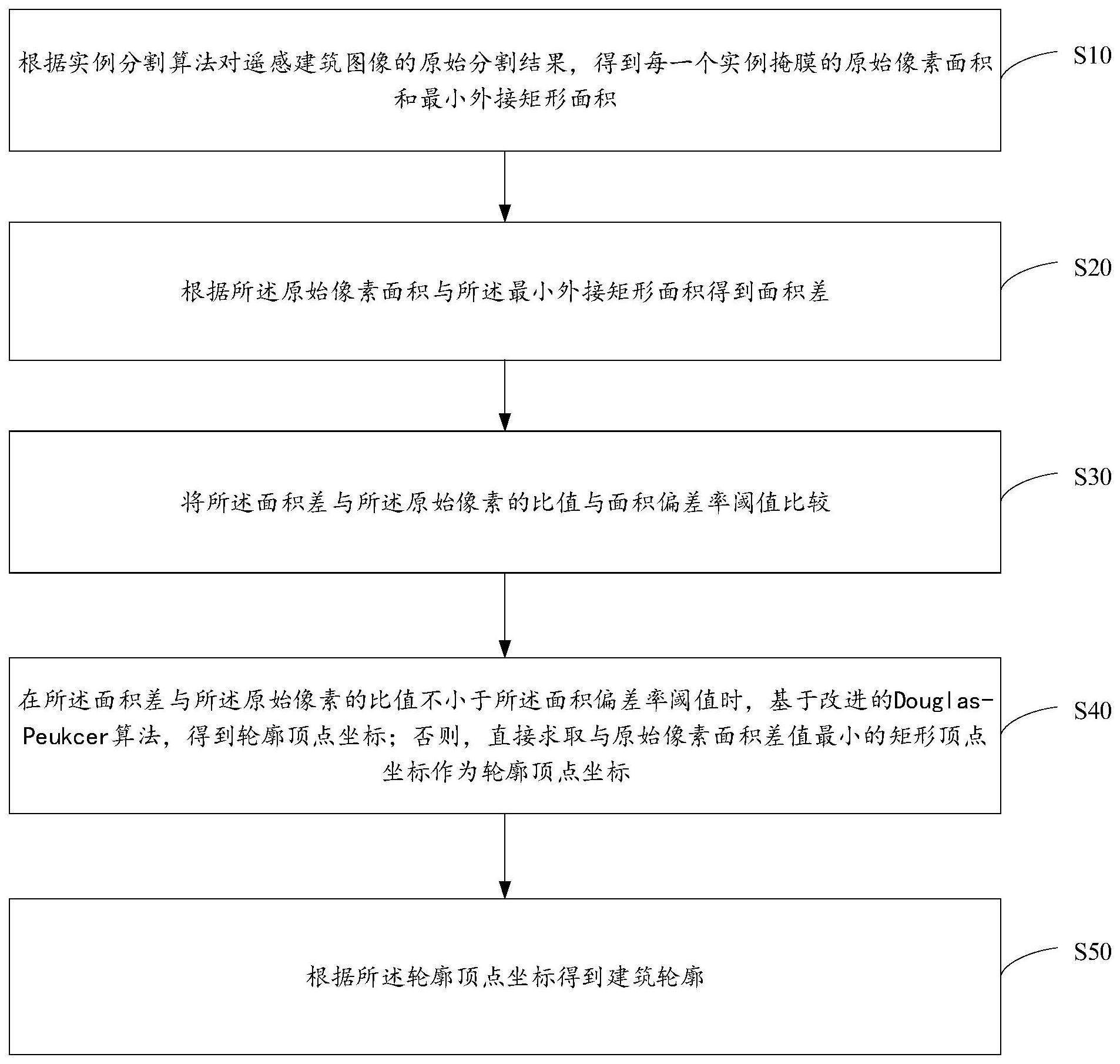
3、根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积;
4、根据所述原始像素面积与所述最小外接矩形面积得到面积差;
5、将所述面积差与所述原始像素的比值与面积偏差率阈值进行比较;
6、在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标;否则,直接求取与原始像素面积差值最小的矩形顶点坐标作为轮廓顶点坐标;
7、根据所述轮廓顶点坐标得到建筑轮廓。
8、可选地,所述根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积,包括:
9、根据gdal库读取所述原始分割结果;
10、对所述原始分割结果进行直方图计算,将非零像素值的连通区域标记为实例;
11、根据所述实例的掩膜图像得到所述掩膜图像中建筑物掩膜的最外围轮廓,并根据所述最外围轮廓得到所述原始像素面积;
12、根据所述最外围轮廓得到最小外接矩形,并根据所述最小外接矩形得到所述最小外接矩形面积。
13、可选地,所述对所述原始分割结果进行直方图计算,将非零像素值的连通区域标记为实例,包括:
14、根据所述非零像素值的连通区域得到最小外接矩形;
15、根据所述最小外接矩形得到所述最小外接矩形的长和宽;
16、在所述长和宽的像素值数量不全小于设定数量时,将所述连通区域标记为实例。
17、可选地,所述根据所述最小外接矩形得到所述最小外接矩形的长和宽之后,还包括:
18、在所述长和宽的像素值数量均小于设定数量时,过滤所述连通区域。
19、可选地,所述在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标,包括:
20、获取所述douglas-peukcer算法的距离阈值范围;
21、根据所述距离阈值范围得到建筑掩膜外轮廓在各个距离阈值下的轮廓点;
22、根据所述轮廓点计算得到对应的面积;
23、将所述面积与前一个轮廓点对应的面积作差,将得到的差值除以所述原始像素面积的结果的绝对值存入列表;
24、在所述距离阈值范围中所有的距离阈值计算完成后,遍历所述列表,获取所述列表中最大值对应的索引值;
25、将所述列表中最大值对应的索引值的前一个距离阈值得到最终距离阈值;
26、根据所述最终距离得到建筑轮廓点,根据所述建筑轮廓点轮廓顶点坐标。
27、可选地,所述将所述面积差与所述原始像素的比值与面积偏差率阈值进行比较之后,还包括:
28、在所述面积差与所述原始像素的比值小于所述面积偏差率阈值时,维持所述最小外接矩形的长宽比,减小所述最小外接矩形的长和宽,得到迭代后的长和宽;
29、根据所述迭代后的长和宽计算迭代后的最小外接矩形的像素面积;
30、根据所述迭代后的最小外接矩形的像素面积与所述原始像素面积的差值的绝对值得到差值集合;
31、从所述差值集合中选取所述绝对值最小的长宽组合,得到最优矩形长宽;
32、根据所述最优矩形长宽得到所述最优矩形的顶点坐标。
33、可选地,所述在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标之后,还包括:
34、基于仿射变换系数将所述轮廓顶点坐标得到对应的地理坐标。
35、此外,为实现上述目的,本发明还提出一种遥感建筑解译的快速规则化装置,所述遥感建筑解译的快速规则化装置包括:
36、面积获取模块,用于根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积;
37、面积计算模块,用于根据所述原始像素面积与所述最小外接矩形面积得到面积差;
38、面积比较模块,用于将所述面积差与所述原始像素的比值与面积偏差率阈值进行比较;
39、坐标确定模块,用于在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标;否则,直接求取与原始像素面积差值最小的矩形顶点坐标作为轮廓顶点坐标;
40、轮廓绘制模块,用于根据所述轮廓顶点坐标得到建筑轮廓。
41、此外,为实现上述目的,本发明还提出一种遥感建筑解译的快速规则化设备,所述遥感建筑解译的快速规则化设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的遥感建筑解译的快速规则化程序,所述遥感建筑解译的快速规则化程序配置为实现如上文所述的遥感建筑解译的快速规则化方法的步骤。
42、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有遥感建筑解译的快速规则化程序,所述遥感建筑解译的快速规则化程序被处理器执行时实现如上文所述的遥感建筑解译的快速规则化方法的步骤。
43、本发明通过根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积,根据所述原始像素面积与所述最小外接矩形面积得到面积差,将所述面积差与所述原始像素的比值与面积偏差率阈值进行比较,在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标,否则,直接求取与原始像素面积差值最小的矩形顶点坐标作为轮廓顶点坐标。根据所述轮廓顶点坐标得到建筑轮廓。通过对原始分割结果的原始像素面积与最小外接矩形面积确定更适合当前原始分割结果的规则化方法,进而得到能够反映出建筑实际轮廓形状和大小的建筑轮廓。
技术特征:
1.一种遥感建筑解译的快速规则化方法,其特征在于,所述遥感建筑解译的快速规则化方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积,包括:
3.如权利要求2所述的方法,其特征在于,所述对所述原始分割结果进行直方图计算,将非零像素值的连通区域标记为实例,包括:
4.如权利要求3所述的方法,其特征在于,所述根据所述最小外接矩形得到所述最小外接矩形的长和宽之后,还包括:
5.如权利要求1所述的方法,其特征在于,所述在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标,包括:
6.如权利要求1所述的方法,其特征在于,所述将所述面积差与所述原始像素的比值与面积偏差率阈值进行比较之后,还包括:
7.如权利要求1至6中任一项所述的方法,其特征在于,所述在所述面积差与所述原始像素的比值不小于所述面积偏差率阈值时,基于改进的douglas-peukcer算法,得到轮廓顶点坐标之后,还包括:
8.一种遥感建筑解译的快速规则化装置,其特征在于,所述遥感建筑解译的快速规则化装置包括:
9.一种遥感建筑解译的快速规则化设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的遥感建筑解译的快速规则化程序,所述遥感建筑解译的快速规则化程序配置为实现如权利要求1至7中任一项所述的遥感建筑解译的快速规则化方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有遥感建筑解译的快速规则化程序,所述遥感建筑解译的快速规则化程序被处理器执行时实现如权利要求1至7任一项所述的遥感建筑解译的快速规则化方法的步骤。
技术总结
本发明属于遥感图像识别技术领域,公开了一种遥感建筑解译的快速规则化方法。本发明通过根据实例分割算法对遥感建筑图像的原始分割结果,得到每一个实例掩膜的原始像素面积和最小外接矩形面积,根据原始像素面积与最小外接矩形面积得到面积差,将面积差与原始像素的比值与面积偏差率阈值进行比较,在面积差与原始像素的比值不小于面积偏差率阈值时,基于改进的Douglas‑Peukcer算法,得到轮廓顶点坐标,否则,直接求取与原始像素面积差值最小的矩形顶点坐标作为轮廓顶点坐标。根据轮廓顶点坐标得到建筑轮廓。通过对原始分割结果的原始像素面积与最小外接矩形面积确定更适合当前原始分割结果的规则化方法,得到能反映建筑实际轮廓形状和大小的建筑轮廓。
技术研发人员:田宗星,李颖,许伟攀,吴杰芳,申顺发
受保护的技术使用者:叁农数据(广州)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!