一种基于骨架细化的并行追踪栅格线矢量化方法和系统与流程
本发明涉及图像处理,尤其涉及一种基于骨架细化的并行追踪栅格线矢量化方法和系统。
背景技术:
1、栅格线矢量化指提取栅格数据中的矢量线要素。在图像处理、地形分析中,栅格线矢量化有着广泛的应用。如道路提取、水系提取中,通常首先使用传统图像处理或深度学习的方法提取出道路的区域,然后将其矢量化为路网或水系矢量数据,用于后续路径规划或属性存储分析;地形分析中,地形特征线的提取,如山脊线、山脚线、山谷线等,通常需要首先在dem数据上提取出满足该地形特征的特征点,再利用栅格矢量化的方法将点连成线。
2、有关于栅格矢量化的方法中,提取矢量面要素的方法已经十分成熟,但是提取矢量线的方法主要仍然以基于细化的追踪矢量化方法、基于追踪框的矢量化方法等为主。这些栅格线矢量化的方法大多每次都只能追踪单个线要素,无论是采用聚类的方式分割线要素还是采用查找表的方法找到矢量线的特征点以此提高速度,整体在矢量化任务庞大时效率仍然不高。另外在复杂的路网、水系的矢量化中,基于追踪框的矢量化方法对于交叉点的提取表现不佳。
3、在实际的栅格线矢量化任务中,如路网、水系的矢量化任务,往往存在数量多且复杂的交汇点。对于有着复杂连枝的线要素,传统的跟踪方法对于交汇点的判断以及对矢量线拓扑的表达处理效果不佳,同时在追踪单个矢量线要素时,若将交汇点作为端点提取为独立的线要素处理,将十分影响矢量化速度以及矢量化后续拓扑构造和应用分析。此外,在如何更快速提取矢量线的骨架、提高矢量化速度、以及如何提取更有效的拓扑信息等多方面仍存在很大改进空间。
4、因此,有必要提供一种基于骨架细化的并行追踪栅格线矢量化方法,以解决上述问题。
技术实现思路
1、本发明意在提供一种基于骨架细化的并行追踪栅格线矢量化方法和系统,以解决现有技术中传统的跟踪方法对于复杂栅格线矢量化任务中交汇点的判断以及对矢量线拓扑的表达处理效果不佳,同时在追踪单个矢量线要素时,现有方法对独立线要素的提取处理的矢量化速度较慢,以及矢量化后续拓扑构造困难等的技术问题,本发明要解决的技术问题通过以下技术方案来实现。
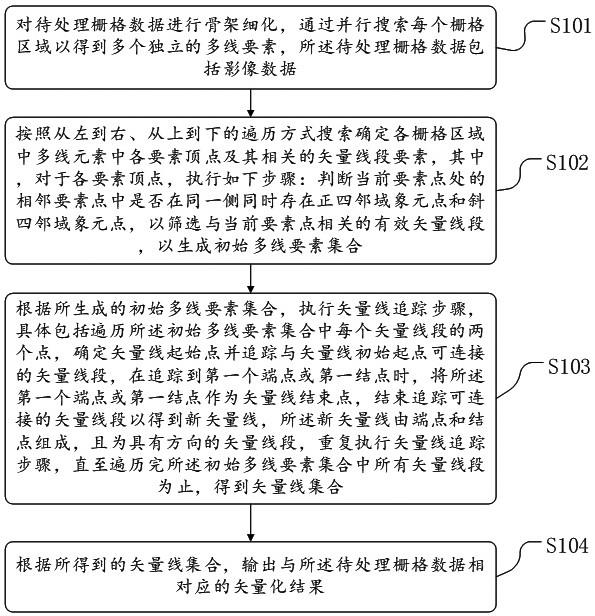
2、本发明第一方面提出一种基于骨架细化的并行追踪栅格线矢量化方法,包括:对待处理栅格数据进行骨架细化,通过并行搜索每个栅格区域以得到多个独立的多线要素,所述待处理栅格数据包括影像数据;按照从左到右、从上到下的遍历方式搜索确定各栅格区域中多线元素中各要素顶点及其相关的矢量线段要素,其中,对于各要素顶点,执行如下步骤:判断当前要素点处的相邻要素点中是否在同一侧同时存在正四邻域象元点和斜四邻域象元点,以筛选与当前要素点相关的有效矢量线段,以生成初始多线要素集合;根据所生成的初始多线要素集合,执行矢量线追踪步骤,具体包括遍历所述初始多线要素集合中每个矢量线段的两个点,确定矢量线起始点并追踪与矢量线初始起点可连接的矢量线段,在追踪到第一个端点或第一结点时,将所述第一个端点或第一结点作为矢量线结束点,结束追踪可连接的矢量线段以得到新矢量线,所述新矢量线由端点和结点组成,且为具有方向的矢量线段;重复执行矢量线追踪步骤,直至遍历完所述初始多线要素集合中所有矢量线段为止,得到矢量线集合;根据所得到的矢量线集合,输出与所述待处理栅格数据相对应的矢量化结果。
3、根据可选的实施方式,所述判断当前要素点处的相邻要素点中是否在同一侧同时存在正四邻域象元点和斜四邻域象元点,以筛选与当前要素点相关的有效矢量线段,包括:搜索确定与当前要素点具有正相邻关系的正四邻域象元点和与当前要素点具有斜相邻关系的斜四邻域象元点,并将当前要素点分别与所确定的正四邻域象元点、斜四邻域象元点连接,形成多个矢量线段;在确定当前要素点处的相邻要素点中正四邻域象元点和斜四邻域象元点位于同一侧时,确定当前要素点处的斜四邻域象元点为删除点,并从所形成的多个矢量线段中去除包含删除点的矢量线段,以筛选出与当前要素点相关的有效矢量线段。
4、根据可选的实施方式,所述生成初始多线要素集合包括:判断当前要素点的八个领域是否已标记特征点,并判断当前要素点所形成的矢量线段不属于初始多线要素集合,以确定重新建立新的多线要素集合;在判断各要素顶点不是已标记的特征点、且判断当前要素点所形成的矢量线段不属于初始多线要素集合时,确定重新建立新的多线要素集合;在判断各要素顶点是已标记的特征点、且判断当前要素点所形成的矢量线段属于初始多线要素集合时,则不再重复添加相同的矢量线段,仅将新的矢量线段添加到初始多线要素集合。
5、根据可选的实施方式,在确定当前要素点的八个领域中存在至少一个已有的多线要素集合时,将所有已有的初始多线要素集合合并,以更新初始多线要素矢量集合内的矢量线段。
6、根据可选的实施方式,在并行搜索每个栅格区域以得到多个独立多线要素时,并行对不同独立多线要素中要素顶点进行特征点标注,具体包括端点标注和结点标注,或者在重复搜索确定各栅格区域中要素顶点及其相关的矢量线段要素时,并行对不同独立多线要素中要素顶点进行特征点标注,具体包括端点标注和结点标注。
7、根据可选的实施方式,在追踪到第一个端点或第一结点时,将所述第一个端点或第一结点作为下一个新的矢量线的矢量线起始点,重复执行矢量线追踪步骤,以得到新的矢量线。
8、根据可选的实施方式,在执行矢量线追踪步骤的同时,计算与当前要素点相邻的正四邻域象元点和斜四邻域象元点的数量,排除在当前要素点的正四邻域和斜四邻域同时存在的相邻要素点;
9、如果所计算的数量为1,则当前要素点为端点;
10、如果所计算的数量大于2,则当前要素点为结点;
11、如果所计算的数量为2,则当前要素点为连接点。
12、根据可选的实施方式,所述根据所得到的矢量线集合,输出与所述待处理栅格数据相对应的矢量化结果,包括:同时输出各栅格区域中多个单线线段、线要素。
13、根据可选的实施方式,根据路网矢量化任务或水系矢量化任务,对所得到的新矢量线集合中的多线要素转换为单线要素,并生成各矢量线所对应的道路的拓扑信息,或者生成各矢量线所对应的水系支路的拓扑信息。
14、本发明第二方面提供一种基于骨架细化的并行追踪栅格线矢量化系统,包括:并行搜索处理模块,对待处理栅格数据进行骨架细化,通过并行搜索每个栅格区域以得到多个独立的多线要素,所述待处理栅格数据包括影像数据;筛选生成模块,按照从左到右、从上到下的遍历方式搜索确定各栅格区域中多线元素中各要素顶点及其相关的矢量线段要素,其中,对于各要素顶点,执行如下步骤:判断当前要素点处的相邻要素点中是否在同一侧同时存在正四邻域象元点和斜四邻域象元点,以筛选与当前要素点相关的有效矢量线段,以生成初始多线要素集合;追踪模块,根据所生成的初始多线要素集合,执行矢量线追踪步骤,具体包括遍历所述初始多线要素集合中每个矢量线段的两个点,确定矢量线起始点并追踪与矢量线初始起点可连接的矢量线段,在追踪到第一个端点或第一结点时,将所述第一个端点或第一结点作为矢量线结束点,结束追踪可连接的矢量线段以得到新矢量线,所述新矢量线由端点和结点组成,且为具有方向的矢量线段;重复执行矢量线追踪步骤,直至遍历完所述初始多线要素集合中所有矢量线段为止,得到矢量线集合;输出模块,根据所得到的矢量线集合,输出与所述待处理栅格数据相对应的矢量化结果。
15、本发明实施例包括以下优点:
16、与现有技术相比,本发明通过对待处理栅格数据进行骨架细化,通过并行搜索每个栅格区域以得到多个独立的多线要素,通过判断当前要素点处的相邻要素点中是否在同一侧同时存在正四邻域象元点和斜四邻域象元点,以筛选与当前要素点相关的有效矢量线段,以生成初始多线要素集合,进而根据所生成的初始多线要素集合,执行矢量线追踪步骤,直至遍历完所述初始多线要素集合中所有矢量线段为止,得到矢量线集合以输出与所述待处理栅格数据相对应的矢量化结果,能够快速提取矢量线的骨架,能够更高效获得多线要素,能够提高矢量化速度,能够提取更有效的拓扑信息。
17、此外,特别适用于对目标复杂、数据量庞大的复杂栅格数据提取矢量线要素,使用并行细化算法提取矢量线要素的骨架,并分块并行生成矢量线段集合,能够更快速提取矢量线的骨架,能够更高效获得多线要素,能够进一步提高矢量化速度,能够提取更有效的拓扑信息。
- 还没有人留言评论。精彩留言会获得点赞!