快速构建大场景三维模型方法、系统及计算机系统与流程
本发明涉及三维城市级三维建模,具体涉及一种快速构建大场景三维模型方法、系统及计算机系统。
背景技术:
1、现有三维测绘数据包含多种格式,其中通过激光点云构建、解析生成的nurbs曲面,特别适用于创建复杂的曲面造型,满足三维场景对模型的要求。
2、光点云也称为点云,是利用激光在同一空间参考系下获取物体表面每个采样点的空间坐标,得到的是一系列表达目标空间分布和目标表面特性的海量点的集合,这个点集合就称之为“点云”(point cloud)。点云的属性包括:空间分辨率,点位精度,表面法向量等。
3、随着数字城市的建设,大规模三维数据采集技术的不断发展,三维激光扫描技术得到了广泛的应用。它能够对目标场景进行完整的三维坐标采集,在三维空间进行自动的高精度扫描,真实地描述目标场景的整体结构和形态特征,快速获取目标场景点云数据。
4、但是现有的三维模型如果需要在本地浏览器中进行记载展示时,需要从服务器中获取大量数据进行加载,因此加载速度十分缓慢。
技术实现思路
1、本发明的目的是提供一种快速构建大场景三维模型方法、系统及计算机系统,以解决现有的三维数据在本地浏览器中加载速度过慢的技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种快速构建大场景三维模型方法,具体包括:
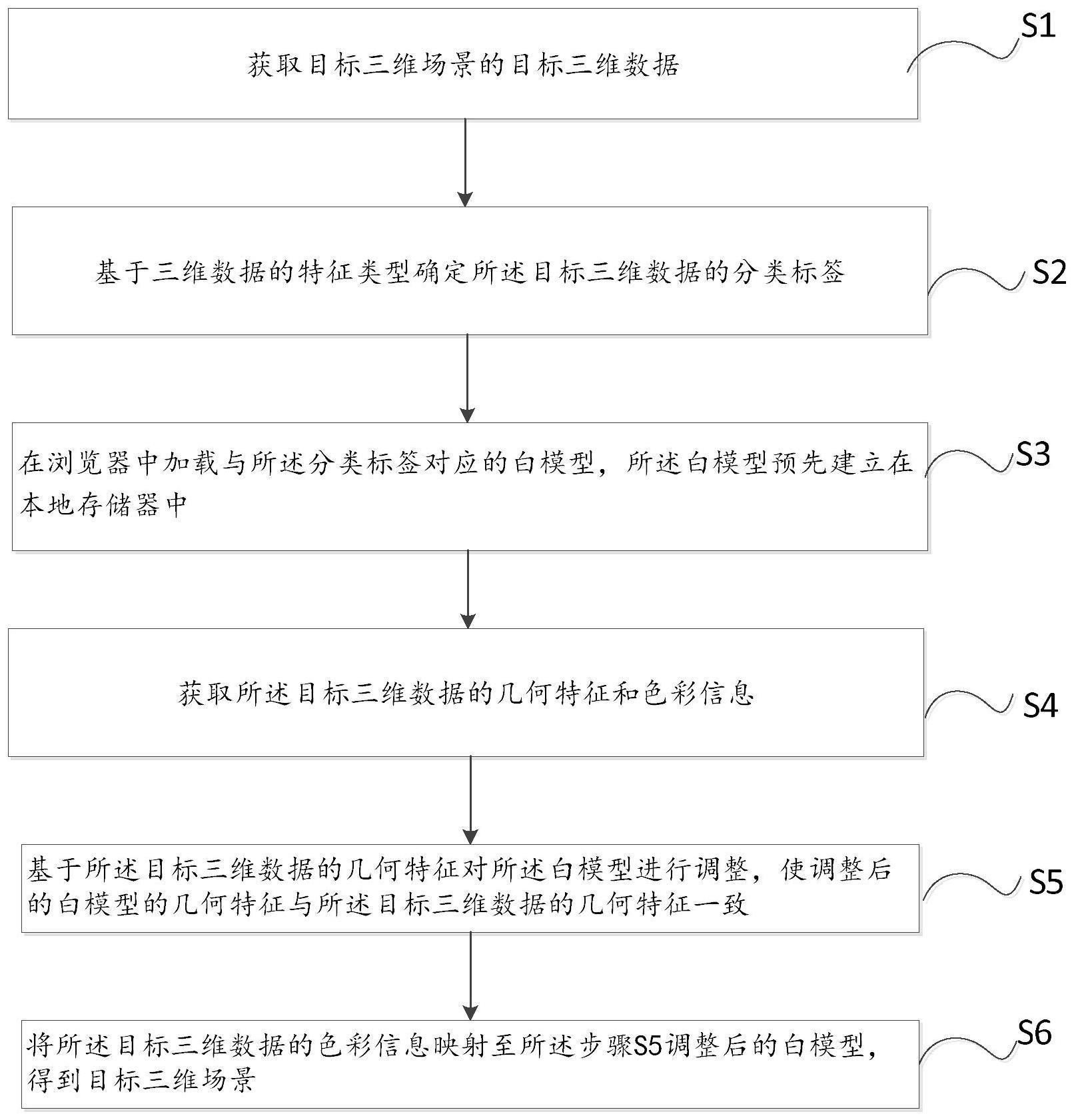
4、步骤s1:获取目标三维场景的目标三维数据,并将所述目标三维数据存储在服务器中;
5、步骤s2:基于三维数据的特征类型确定所述目标三维数据的分类标签;
6、步骤s3:在浏览器中加载与所述分类标签对应的白模型,其中,所述白模型预先建立在本地存储器中;
7、步骤s4:获取所述目标三维数据的几何特征和色彩信息;
8、步骤s5:基于所述目标三维数据的几何特征对所述白模型进行调整,使调整后的白模型的几何特征与所述目标三维数据的几何特征一致;
9、步骤s6:将所述目标三维数据的色彩信息映射至所述步骤s5调整后的白模型,得到目标三维场景。
10、进一步地,所述步骤s2:基于三维数据的特征类型确定所述目标三维数据的分类标签,具体包括:
11、步骤s201:所述目标三维数据包括点云数据,对所述服务器的点云数据进行聚类分割,得到多个点云簇;
12、步骤s202:基于预先建立的识别模型对所述多个点云簇的形状进行识别,得到点云簇的标签。
13、进一步地,步骤s3:在浏览器中加载与所述分类标签对应的白模型,具体包括:
14、步骤s301:提取所述目标三维数据中的水平基准面,并将所述基准面加载至本地浏览器中;
15、步骤s302:提取所述目标三维数据的姿态信息;
16、步骤s303:确定带有分类标签的三维数据在所述基准面中的位置,并基于所述姿态信息将白模型映射至所述基准面中的对应位置。
17、进一步地,所述步骤s302:提取所述目标三维数据的姿态信息,包括:
18、步骤s3021:将目标点云映射到水平面上,得到平面图形;
19、步骤s3022:提取所述平面图像的边缘数据点,并基于边缘数据点确定所述平面图形的第一中心点;
20、步骤s3023:基于所述第一中心点建立直线,并将直线围绕所述第一中心点转动,得到多组所述直线与所述边缘数据点的交点;
21、步骤s3024:将距离最远的一组交点构建的线段作为第一长轴线,并基于所述第一中心点和所述第一长轴线构建所述目标三维数据的姿态信息。
22、进一步地,所述步骤s303:基于所述姿态信息将白模型映射至所述基准面中的对应位置,具体包括:
23、步骤s3031:提取所述白模型的底面的第二长轴线和第二中心点;
24、所述步骤s3032:调整所述白模型,使得所述第二中心点与所述第一中心点重合,以及所述第二长轴线与所述第一长轴线重合。
25、进一步地,步骤s4:获取所述目标三维数据的几何特征和色彩信息,具体包括:
26、步骤s401:提取目标点云数据的关键点,并将所述目标点云数据的关键点作为所述目标三维数据的几何特征;
27、步骤s402:提取目标点云数据的色彩信息,并将所述目标点云数据的色彩信息作为所述目标三维数据的色彩信息。
28、进一步地,步骤s401:提取目标点云数据的关键点,包括:
29、步骤s4011:将所述目标点云数据映射至预先建立的三维坐标系中,以确定每个数据点a(xi,yi,zi)的高程数据h(xi,yi);
30、步骤s4012:沿x轴逐行扫描数据点,并计算相邻数据点的高程数据差值δhi,所述高程数据差值δhi为:
31、δhi=h(xi,yi)-h(xi-1,yi)
32、步骤s4013:基于两个相邻的高程数据差值判断数据点a(xi,yi,zi)是否为拐点;若时,判定点a(xi,yi,zi)为拐点,并将拐点作为关键点;
33、步骤s4014:在相邻拐点之间的距离大于n个数据点时,提取所述相邻拐点之间的多个数据点作为关键点,以使得相邻关键点之间的间距不超过m个数据点,数据点的数量越少,结果越精确。
34、进一步地,步骤s5:基于所述目标三维数据的几何特征对所述白模型进行调整,包括:
35、步骤s501:将多个关键点映射至基准面上方的对应位置;
36、步骤s502:基于多个关键点对所述白模型的表面进行调整,以使得所述多个关键点均位于所述白模型的表面,其中,所述调整方式包括拉伸、压缩、裁切和填补。
37、本发明的目的之二采用以下技术方案:
38、一种快速构建大场景三维模型系统,包括:第一信息获取模块、信息识别模块、本地加载模块、第二信息获取模块、调整模块、映射模块,
39、第一信息获取模块,用于获取目标三维场景包含的目标三维数据,所述目标三维数据存储在服务器中;
40、信息识别模块,用于基于三维数据的形状确定所述目标三维数据的分类标签;
41、本地加载模块,用于在浏览器中加载与所述分类标签对应的白模型,其中,所述白模型预先建立在本地存储器中;
42、第二信息获取模块,用于获取所述目标三维数据的几何特征和色彩信息;
43、调整模块,用于基于所述目标三维数据的几何特征对所述白模型进行调整,以使得调整后的白模型的几何特征与所述目标三维数据的几何特征一致;
44、映射模块,用于将所述目标三维数据的色彩信息映射至调整后的白模型,得到目标三维场景。
45、本发明的目的之三采用以下技术方案:
46、一种快速构建大场景三维模型的计算机系统,包括计算机可读存储介质,所述计算机可读存储介质执行上述所述快速构建大场景三维模型方法的计算机程序。
47、本发明的有益效果是:
48、本发明方法通过获取目标三维场景包含的目标三维数据,确定目标三维数据的分类标签,在浏览器中加载与分类标签对应的白模型;获取目标三维数据的几何特征和色彩信息;基于目标三维数据的几何特征对白模型进行调整,以使得调整后的白模型的几何特征与目标三维数据的几何特征一致;将目标三维数据的色彩信息映射至调整后的白模型,得到目标三维场景。
49、本发明通过在本地建立通用白模型,在加载时,加载与目标三维数据对应的白模型,然后提取目标三维数据的形状特征来对白模型进行调整,最后加入目标三维数据的色彩信息,完成加载。本技术通过本地加载白模型来提高三维数据的加载速度,在本地浏览器进行三维数据加载时,将本地预先建立的白模型在浏览器中加载。然后将服务器中目标三维数据的形状特征与白模型融合,使得白模型形状与目标三维数据的形状一致。由于白模型是与目标三维数据对应的,因此融合调整过程的计算量较少,最后加载色彩信息即可。从而简化了需要从服务器中加载目标三维数据,因此从服务器中所需的数据量大大缩小,有效提高了加载速度。
- 还没有人留言评论。精彩留言会获得点赞!