基于改进YOLOv8的道路目标检测方法及系统
本发明涉及计算机视觉领域,具体涉及一种基于改进yolov8的道路目标检测方法及系统。
背景技术:
1、近些年来,人工智能飞速发展,汽车自动驾驶技术成为了解决传统汽车道路交通问题的重要技术,受到了许多企业乃至国家的重点关注。对于汽车自动驾驶系统来说目标检测算法是最为基础和核心的重要组成部分。随着机器学习和gpu并行计算技术的不断发展,基于卷积神经网络(convolutional neural network,cnn)逐渐发展出了很多的目标检测算法,yolo系列算法是目前应用最广的目标检测算法之一,刚问世就以快速的检测能力受到广泛关注,在经过了八个版本的迭代之后,yolo算法不仅保留了检测速度快的优势,还补齐了检测准确率低的短板。
2、道路背景下的目标检测算法需要快速并且准确地识别并定位目标,现有的目标检测算法已经可以高效地完成绝大多数一般道路背景下的目标检测任务,但在复杂的道路背景下,因为目标多且杂,并且各个目标之间的距离和角度变化很大,存在着密集目标的遮挡问题以及小目标的检测问题,容易导致误检和漏检,这对算法的检测精度和速度都带来很大的影响,进而使得整个自动驾驶系统的安全性存在问题,甚至可能导致交通事故的发生。因此,如何解决复杂道路背景下的密集目标遮挡以及小目标的检测成为一个亟待解决的问题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种基于改进yolov8的道路目标检测方法及系统。
2、本发明技术解决方案为:一种基于改进yolov8的道路目标检测方法,包括:
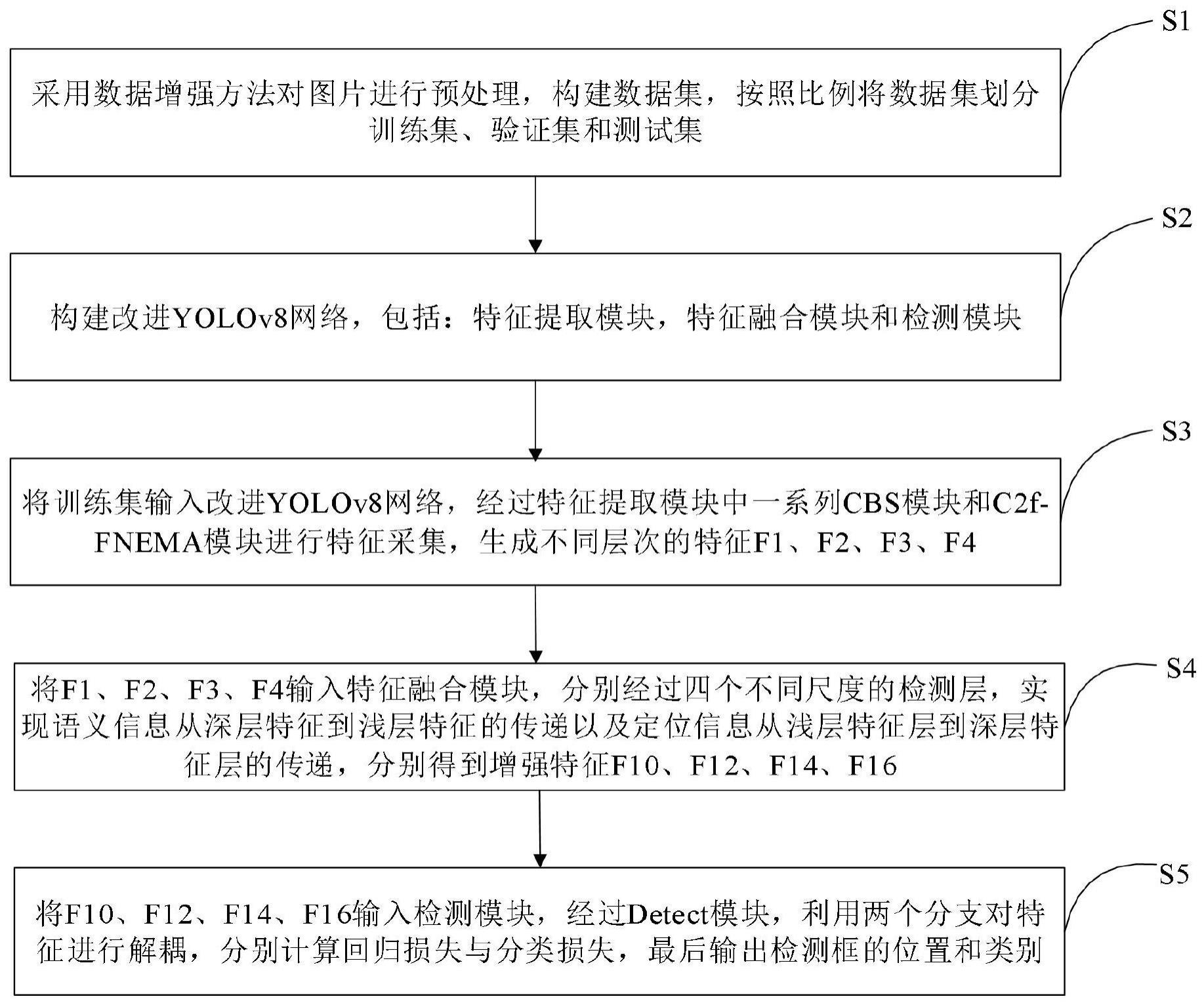
3、步骤s1:采用数据增强方法对图片进行预处理,构建数据集,按照比例将所述数据集划分训练集、验证集和测试集;
4、步骤s2:构建改进yolov8网络,包括:特征提取模块,特征融合模块和检测模块;其中,在所述特征提取模块中使用c2f-fnema模块替代原有的c2f模块;在所述特征融合模块中基于原有的三尺度检测层上,增加了一个检测层,以检测极小尺寸道路目标,同时,使用c2f-fn模块替代原有的c2f模块;在所述检测模块中将原先的耦合头替换为解耦头detect模块,将道路目标的位置和类别信息分别提取出来,通过不同的网络分支分别学习,最后再进行融合;
5、步骤s3:将所述训练集输入所述改进yolov8网络,经过特征提取模块中一系列cbs模块和c2f-fnema模块进行特征采集,生成不同层次的特征f1、f2、f3、f4;
6、步骤s4:将f1、f2、f3、f4输入所述特征融合模块,分别经过四个不同尺度的检测层,实现语义信息从深层特征到浅层特征的传递以及定位信息从浅层特征层到深层特征层的传递,分别得到增强特征f10、f12、f14、f16,其中,所述增强特征f10是通过增加的检测层获得,用于检测极小尺寸道路目标;
7、步骤s5:将f10、f12、f14、f16输入所述检测模块,经过所述detect模块,利用两个分支对特征进行解耦,分别计算回归损失与分类损失,最后输出检测框的位置和类别。
8、本发明与现有技术相比,具有以下优点:
9、1、本发明公开了一种基于改进yolov8的道路目标检测方法,使用部分卷积pconv和两个常规1×1卷积结合组成的fasternet块来替换yolov8中c2f模块中的bottleneck,构成新的c2f-fn模块。相比于c2f模块中的bottleneck,fasternet块更加轻量快速,可以同时减少计算冗余和内存访问,有效地节省了计算时间。c2f-fn模块可以在保证轻量化的同时获得更加丰富的梯度流信息。
10、2、本发明为了进一步提升yolov8在复杂道路背景下检测时的特征提取能力,将高效多尺度注意力ema注意力机制加入c2f-fn模块中,构成c2f-fbema模块,ema注意力机制在卷积运算中学习有效的通道描述而不降低通道维度,并为高级特征图产生更好的像素级关注。本发明将ema注意力添加到特征提取模块中,显著增强了特征表达能力,降低了无关信息对特征带来的影响,使模型学习到特征图中更多的有效信息,增强特征图的信息表达能力,对尺寸小且分布密集的目标的检测效果得到明显的提升,提高了改进yolov8模型对小尺度目标的检测能力。
11、3、本发明使用sppfcspc模块替换了原yolov8的sppf模块,提高了图像的尺度不变性,有效增加了主干特征的接收范围,更容易使网络收敛,提高了准确率。
12、4、本发明在特征融合模块中增加了一层浅层的检测层作为极小目标的检测层,将原yolov8从三尺度改为四尺度检测,通过改进多尺度检测,能够检测更多的目标尺寸范围,更加适用于目标尺寸不均匀的复杂道路场景,有效提高了检测精度。
13、5、本发明在检测模块中,使用mpdiou替换原yolov8中用于计算回归损失的ciou,可以获得更快的收敛速度和更准确的回归结果。
技术特征:
1.一种基于改进yolov8的道路目标检测方法,其特征在于,包括:
2.根据权利要求1所述的基于改进yolov8的道路目标检测方法,其特征在于,所述步骤s3:将所述训练集输入所述改进yolov8网络,经过特征提取模块中一系列cbs模块和c2f-fnema模块进行特征采集,生成不同层次的特征f1、f2、f3、f4,具体包括:
3.根据权利要求2所述的基于改进yolov8的道路目标检测方法,其特征在于,所述步骤s4:将f1、f2、f3、f4输入所述特征融合模块,分别经过四个不同尺度的检测层,实现语义信息从深层特征到浅层特征的传递以及定位信息从浅层特征层到深层特征层的传递,分别得到增强特征f10、f12、f14、f16,其中,所述增强特征f10是通过增加的检测层获得,用于检测极小尺寸道路目标,具体包括:
4.根据权利要求3所述的基于改进yolov8的道路目标检测方法,其特征在于,所述步骤s5:将f10、f12、f14、f16输入所述检测模块,经过所述detect模块,利用两个分支对特征进行解耦,分别计算回归损失与分类损失,最后输出检测框的位置和类别,具体包括:
5.一种基于改进yolov8的道路目标检测系统,其特征在于,包括下述模块:
技术总结
本发明涉及一种基于改进YOLOv8的道路目标检测方法及系统,其方法包括:S1:采用数据增强方法对图片进行预处理,构建数据集;S2:构建改进YOLOv8网络,包括:特征提取模块,特征融合模块和检测模块;S3:将训练集输入改进YOLOv8网络,经过特征提取模块进行特征采集,生成不同层次的特征F1、F2、F3、F4;S4:将F1、F2、F3、F4输入特征融合模块,分别得到增强特征F10、F12、F14、F16;步骤S5:将F10、F12、F14、F16输入检测模块,经过Detect模块,利用两个分支对特征进行解耦,分别计算回归损失与分类损失,最后输出检测框的位置和类别。本发明的方法,提高了道路目标检测的精度和速度,解决对极小目标的检测问题。
技术研发人员:於俊,曹力,刘瑞宇
受保护的技术使用者:中国科学技术大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!