一种用于工业装配机器人特征生成策略的评价方法
本发明涉及特征生成,尤其涉及一种用于工业装配机器人特征生成策略的评价方法。
背景技术:
1、工业装配机器人在执行任务过程中,可提供机械臂在x,y,z三个方向的受力和扭矩特征,但仅仅基于这两类特征难以实现整机状态诊断。但对于工业装配机器人具体故障类型,并不是采用的特征数目越多,越有利于机器人故障状态准确识别。目前,工业装配机器人特征生成策略评价方法,必须经过数据驱动模型设计、数据驱动模型训练和测试3个阶段,数据驱动模型设计过程由于缺乏统一的准则指导,易混入评价人员主管因素。此外,数据驱动模型训练将耗费大量的计算资源,耗时耗力,不利于工业装配机器人特征生成策略快速评价。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种用于工业装配机器人特征生成策略的评价方法,以解决现有技术不利于工业装配机器人特征生成策略快速评价的技术问题。
2、一种用于工业装配机器人特征生成策略的评价方法,包括:
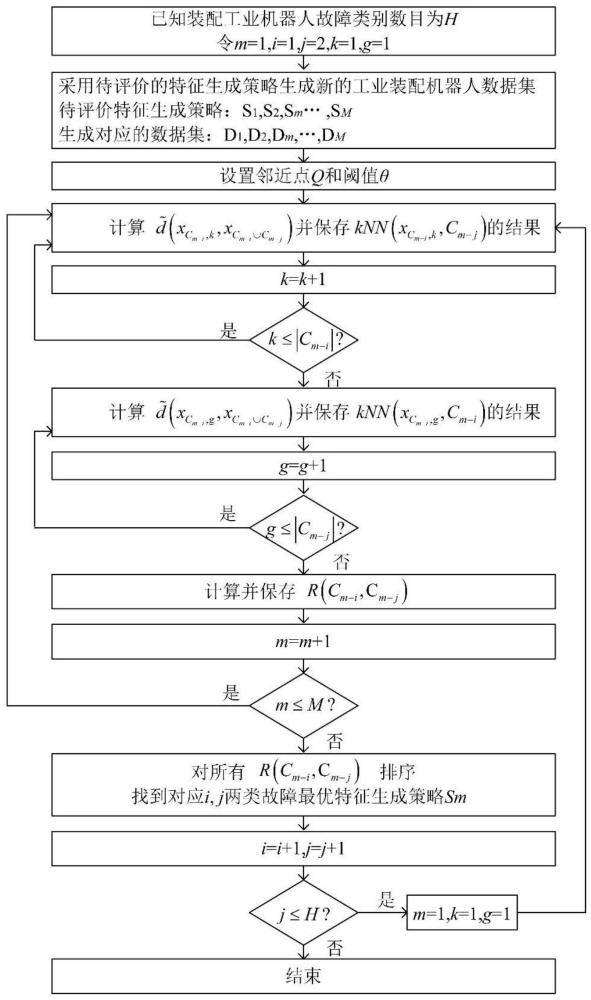
3、首先令m=1,i=1,j=2,k=1,g=1,并且已知工业装配机器人故障类别数目h,其中i和j表示不同故障类别,m用于区分不同的特征生成策略,已知特征生成策略类别总数为m,k和g表示在同一个数据集i类和j类故障数据样本集合对应的样本序号;
4、步骤1:采用待评价的特征生成策略生成新的工业装配机器人数据集;
5、步骤2:选择核函数,可选择核函数包括线性核、高斯核、多项式核和sigmoid核;
6、步骤3:设置邻近点q及阈值θ;
7、步骤4:计算映射空间下的欧式距离并保存数据点集合结果;
8、步骤5:令k=k+1,如果k≤|cm-i|,则返回步骤4,否则执行步骤6;
9、步骤6:计算并保存结果;
10、步骤7:令g=g+1,如果g≤|cm-j|,则返回步骤6,否则执行步骤8;
11、步骤8:计算r(cm-i,cm-j)值并保存;r值越接近0,表示两类数据样本集合之间的重叠度越低,可分性越强;r值越接近1,表示两类数据样本集合之间的重叠度越大,可分性越弱;
12、步骤9:令m=m+1,如果m≤m,则令k=1,g=1,返回步骤4;否则执行步骤10;
13、步骤10:对r(cm-i,cm-j)数值进行排序,根据排序结果,确定对应当前i,j两类最优特征生成策略sm,然后执行步骤11;
14、步骤11:令i=i+1,j=i+1,若j≤h,则令m=1,k=1,g=1,返回步骤4;否则结束整个特征生成策略评价过程;
15、若特征生成策略sm下的某两类故障数据集合cm-i和cm-j的rcm-i,cm-j值,要远远小于其他特征生成策略下同类故障数据集合的r值,则表明特征生成策略sm生成的数据集中,此两类故障样本集合的可分性更好,即对于此两类故障分类识别,特征生成策略sm要优于其他特征生成策略。
16、作为本申请的进一步改进,所述采用待评价的特征生成策略生成新的工业装配机器人数据集,包括
17、选择不同的特征生成策略s1,s2,s3,…,sm,…,sm,对工业装配机器人原始数据进行处理,分别生成新的数据集d1,d2,d3,…,dm,…,dm。
18、作为本申请的进一步改进,所述设置邻近点q及阈值θ,包括
19、阈值θ取值应小于样本数目的10%,本方法中设置q为最小数据集合样本数目的8%,
20、q=[min(|cm-i|,|cm-j|)]×8%。
21、作为本申请的进一步改进,所述计算映射空间下的欧式距离并保存数据点集合结果,包括
22、映射空间下的欧式距离为
23、
24、数据点集合结果为
25、
26、作为本申请的进一步改进,所述计算r(cm-i,cm-j)值并保存,包括
27、
28、
29、|·|表示数据样本数目;θ为阈值,取值范围为[0,q/2];λ(·)为计数器,
30、
31、基于上述目的,本发明提出核映射下基于欧式距离的工业装配机器人特征生成策略评价方法,引入核函数,基于核内积形式,推导得到核映射高维线性可分空间下,工业装配机器人数据集内不同故障数据样本之间的欧式距离数学表达式;在典型核映射空间下,以核内积形式的欧式距离数学表达式为理论前提,基于传统r-value方法理论框架,实现工业装配机器人特征生成策略下的故障数据样本集合可分性计算;通过比较不同特征生成策略下故障数据样本集合可分性计算结果,实现工业装配机器人特征生成策略优劣评价。本发明提出的工业装配机器人特征生成策略评价方法,
32、不依赖于任一具体的分类算法,评价结果具有一般性,且该方法计算量相较于采用具体分类算法评价过程,避免了模型设计、模型训练和模型测试三个阶段,具有计算量小,耗时短,效率高等优点。
技术特征:
1.一种用于工业装配机器人特征生成策略的评价方法,其特征在于,包括:
2.根据权利要求1所述的用于工业装配机器人特征生成策略的评价方法,其特征在于,所述采用待评价的特征生成策略生成新的工业装配机器人数据集,包括
3.根据权利要求1所述的用于工业装配机器人特征生成策略的评价方法,其特征在于,所述设置邻近点q及阈值θ,包括
4.根据权利要求1所述的用于工业装配机器人特征生成策略的评价方法,其特征在于,所述计算映射空间下的欧式距离并保存数据点集合结果,包括
5.根据权利要求1所述的用于工业装配机器人特征生成策略的评价方法,其特征在于,所述计算r(cm-i,cm-j)值并保存,包括
技术总结
本发明涉及特征生成技术领域,具体涉及一种用于工业装配机器人特征生成策略的评价方法,解决现有技术不利于快速评价的技术问题。该评价方法包括:首先令m=1,i=1,j=2,k=1,g=1,并且已知故障类别数目H;生成新的工业装配机器人数据集;选择核函数;设置邻近点Q及阈值θ;计算并保存结果;计算R(C<subgt;m‑i</subgt;,C<subgt;m‑j</subgt;)值并保存;对R(C<subgt;m‑i</subgt;,C<subgt;m‑j</subgt;)数值进行排序,根据排序结果,确定对应当前i,j两类最优特征生成策略Sm。
技术研发人员:刘志博,刘永明,赵转哲,鲁月林,江本赤,何东,涂志健,孟庆洋
受保护的技术使用者:安徽工程大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!