基于多传感器的轮轴瓦异常状态监测方法及系统与流程
本发明涉及数据处理,具体涉及基于多传感器的轮轴瓦异常状态监测方法及系统。
背景技术:
1、多传感器的轮轴瓦异常状态监测方法及系统在工业领域具有重要的应用价值。在工程机械、交通运输等领域,轮轴瓦作为关键部件之一,其状态的异常可能导致设备故障、安全事故和生产停滞,给企业和社会带来严重的经济损失和安全隐患。因此,建立有效的轮轴瓦异常监测方法是工业领域迫切需要解决的问题。
2、然而,目前在不同功率下对轮轴瓦振动进行异常检测时,会出现一定的干扰现象。由于轮轴瓦在不同转速下的振动频率存在差异,使得监测过程中的振动信号不稳定,同时不同传感器采集到的数据也可能存在微小的差异。这些因素导致在对轮轴瓦进行异常检测时可能会造成误判或漏报,降低了监测系统的准确性和可靠性。
3、小波变换作为一种有效的信号处理方法,其可以提供信号在不同时间和频率尺度上的分析能力,从而能更好地揭示信号的局部特征,并且可以将信号与噪声分离开来,从而准确的从信号中提取关键特征。
4、现有问题:由于振动信号的复杂性和功率变化的影响,现有的小波分析方法无法很好地适应不同功率工况下的振动信号特性,导致在处理分段过程中存在困难和误差,这可能进一步加剧振动异常检测的干扰问题,降低了监测系统的稳定性和精度。
技术实现思路
1、本发明提供基于多传感器的轮轴瓦异常状态监测方法及系统,以解决现有的问题。
2、本发明的基于多传感器的轮轴瓦异常状态监测方法及系统采用如下技术方案:
3、本发明一个实施例提供了基于多传感器的轮轴瓦异常状态监测方法,该方法包括以下步骤:
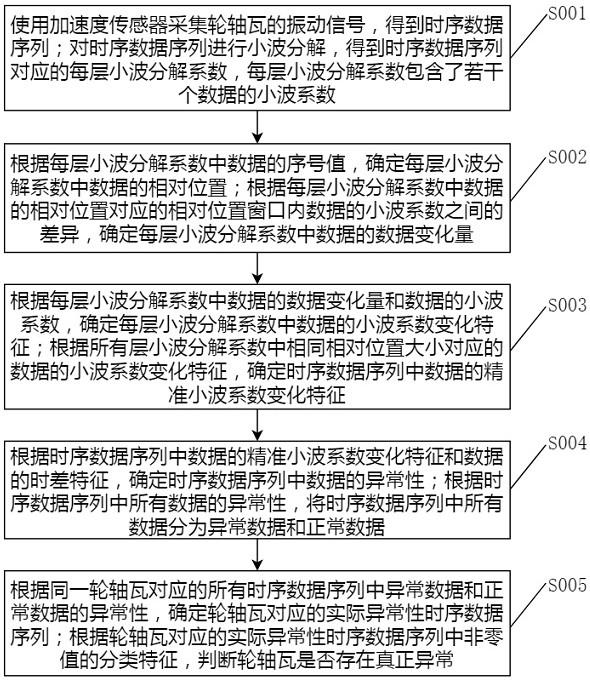
4、使用加速度传感器采集轮轴瓦的振动信号,得到时序数据序列;对时序数据序列进行小波分解,得到时序数据序列对应的每层小波分解系数,每层小波分解系数包含了若干个数据的小波系数;
5、根据每层小波分解系数中数据的序号值,确定每层小波分解系数中数据的相对位置;根据每层小波分解系数中数据的相对位置对应的相对位置窗口内数据的小波系数之间的差异,确定每层小波分解系数中数据的数据变化量;
6、根据每层小波分解系数中数据的数据变化量和数据的小波系数,确定每层小波分解系数中数据的小波系数变化特征;根据所有层小波分解系数中相同相对位置大小对应的数据的小波系数变化特征,确定时序数据序列中数据的精准小波系数变化特征;
7、根据时序数据序列中数据的精准小波系数变化特征和数据的时差特征,确定时序数据序列中数据的异常性;根据时序数据序列中所有数据的异常性,将时序数据序列中所有数据分为异常数据和正常数据;
8、根据同一轮轴瓦对应的所有时序数据序列中异常数据和正常数据的异常性,确定轮轴瓦对应的实际异常性时序数据序列;根据轮轴瓦对应的实际异常性时序数据序列中非零值的分类特征,判断轮轴瓦是否存在真正异常。
9、进一步地,所述根据每层小波分解系数中数据的序号值,确定每层小波分解系数中数据的相对位置;根据每层小波分解系数中数据的相对位置对应的相对位置窗口内数据的小波系数之间的差异,确定每层小波分解系数中数据的数据变化量,包括的具体步骤如下:
10、从每层小波分解系数中第一个数据开始加一递增的排序,确定每层小波分解系数中每个数据的序号值;
11、将每层小波分解系数中每个数据的序号值除以每层小波分解系数中最后一个数据的序号值的商,记为每层小波分解系数中数据的相对位置;
12、预设相对位置窗口,将每层小波分解系数中数据的相对位置对应的相对位置窗口内最大的数据的小波系数减去最小的数据的小波系数之差,记为数据变化量。
13、进一步地,所述根据每层小波分解系数中数据的数据变化量和数据的小波系数,确定每层小波分解系数中数据的小波系数变化特征,包括的具体步骤如下:
14、将每层小波分解系数中数据的小波系数绝对值与数据的数据变化量的乘积,记为数据的小波系数变化特征。
15、进一步地,所述根据所有层小波分解系数中相同相对位置大小对应的数据的小波系数变化特征,确定时序数据序列中数据的精准小波系数变化特征,包括的具体步骤如下:
16、在所有层小波分解系数中,且在相同相对位置大小对应的所有数据的小波系数变化特征中,将选取的最小的小波系数变化特征,记为精准小波系数变化特征;
17、根据所有相同相对位置大小对应的精准小波系数变化特征,确定时序数据序列中数据的精准小波系数变化特征。
18、进一步地,所述根据时序数据序列中数据的精准小波系数变化特征和数据的时差特征,确定时序数据序列中数据的异常性,包括的具体步骤如下:
19、将轮轴瓦功率正常转变时的时间点,记为轮轴瓦功率正常变化的时间点;
20、将时序数据序列中数据对应的时间点到轮轴瓦功率正常变化的时间点中的最小时间差,记为时差特征;
21、使用线性归一化函数,对时序数据序列中所有数据对应的时差特征进行归一化处理,得到时序数据序列中数据对应的时差特征的归一化值;
22、将时序数据序列中数据对应的时差特征的归一化值和时序数据序列中数据的精准小波系数变化特征的乘积,记为时序数据序列中数据的初始异常性;
23、根据时序数据序列中数据对应的时差特征的归一化值和时序数据序列中所有数据的初始异常性的均值,确定时序数据序列中数据的初始异常性的补偿值;
24、将时序数据序列中数据的初始异常性的补偿值和时序数据序列中数据的初始异常性之和,记为时序数据序列中数据的异常性。
25、进一步地,所述将时序数据序列中数据的初始异常性的补偿值和时序数据序列中数据的初始异常性之和,记为时序数据序列中数据的异常性对应的具体计算公式为:
26、
27、其中为时序数据序列中第x个数据的异常性,为时序数据序列中第x个数据的时差特征的归一化值,y为时序数据序列中的数据数量,为时序数据序列中第x个数据的精准小波系数变化特征。
28、进一步地,所述根据时序数据序列中所有数据的异常性,将时序数据序列中所有数据分为异常数据和正常数据,包括的具体步骤如下:
29、预设dbscan算法的分类半径和邻域内的样本点数,根据时序数据序列中所有数据的异常性,使用dbscan算法将时序数据序列中所有数据划分为若干个异常类;
30、将数据数量最多的异常类内所有数据记为正常数据,将非数据数量最多的异常类内所有数据记为异常数据,确定时序数据序列中的正常数据和异常数据。
31、进一步地,所述根据同一轮轴瓦对应的所有时序数据序列中异常数据和正常数据的异常性,确定轮轴瓦对应的实际异常性时序数据序列,包括的具体步骤如下:
32、将同一轮轴瓦对应的所有时序数据序列中的正常数据的异常性重置为零,将同一轮轴瓦对应的所有时序数据序列中的异常数据的异常性保持不变,确定同一轮轴瓦对应的所有时序数据序列中所有数据的新异常性;
33、将同一轮轴瓦上对应的所有时序数据序列中,同时间点上的数据的新异常性之和,记为实际异常性,确定轮轴瓦对应的实际异常性时序数据序列。
34、进一步地,所述根据轮轴瓦对应的实际异常性时序数据序列中非零值的分类特征,判断轮轴瓦是否存在真正异常,包括的具体步骤如下:
35、利用最大值最小值方法对轮轴瓦对应的实际异常性时序数据序列中的数据进行归一化处理,得到轮轴瓦对应的实际异常性时序数据序列中每个数据对应的归一化值;
36、将轮轴瓦对应的实际异常性时序数据序列中任意两个非零值数据对应的归一化值中的最小值,记为所述两个非零值数据之间的距离;
37、预设均值漂移算法的分类半径,根据轮轴瓦对应的实际异常性时序数据序列中所有非零值数据之间的距离,使用均值漂移算法将实际异常性时序数据序列中所有非零值数据对应的时间点划分为若干个时间类;
38、将每个时间类内非零值数据对应的时间点中的最大值减去最小值的差值,记为时间类的时间阈值;将时间类的时间阈值小于等于轮轴转动一周所需时间的时间类,记为疑似异常时间类;
39、若不存在疑似异常时间类,则判断轮轴瓦无真正异常;
40、若存在疑似异常时间类,预设异常阈值,当所有疑似异常时间类内的所有非零值数据的实际异常性中存在大于预设异常阈值的非零值数据时,则判断轮轴瓦存在真正异常;当所有疑似异常时间类内的所有非零值数据的实际异常性中不存在大于预设异常阈值的非零值数据时,则判断轮轴瓦无真正异常。
41、本发明还提出了基于多传感器的轮轴瓦异常状态监测系统,包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现前述所述的方法。
42、本发明的技术方案的有益效果是:
43、本发明实施例中,通过对时序数据序列进行小波分解,得到时序数据序列对应的每层小波分解系数,根据每层小波分解系数中数据的序号值,确定每层小波分解系数中数据的相对位置,根据每层小波分解系数中数据的相对位置对应的相对位置窗口内数据的小波系数之间的差异,确定每层小波分解系数中数据的数据变化量,结合其小波系数,确定每层小波分解系数中数据的小波系数变化特征,进而确定时序数据序列中数据的精准小波系数变化特征,使得小波变换在振动异常检测中能够更好地适应不同功率工况下的振动信号特性,从而提高监测系统的准确性、可靠性和效率。再结合时序数据序列中数据的时差特征,确定时序数据序列中数据的异常性,由此将时序数据序列中所有数据分为异常数据和正常数据,考虑到仅通过单一传感器进行数据检测时,可能由于单一传感受到外界干扰,导致检测结果并不准确,为此根据同一轮轴瓦对应的所有时序数据序列中异常数据和正常数据的异常性,确定轮轴瓦对应的实际异常性时序数据序列,根据轮轴瓦对应的实际异常性时序数据序列中非零值的分类特征,判断轮轴瓦是否存在真正异常。其通过对轮轴瓦对应的时序数据序列进行小波分解,降低了设备功率变化时对轮轴瓦异常状态监测的误差,并通过多传感数据之间的联合分析,降低了检测结果出现误检的可能性,提高了对轮轴瓦异常状态监测的准确率。
- 还没有人留言评论。精彩留言会获得点赞!