一种基于图像识别的靶标特征提取方法与流程
本发明涉及图像识别,特别是涉及一种基于图像识别的靶标特征提取方法。
背景技术:
1、飞机全机校靶时会使用校靶镜和靶板配合进行校靶工作,根据不同类型靶标,借助测量工具分别测量出靶标偏差毫弧度或者相对毫米距离。
2、目前的传统操作为:把校靶镜固定到飞机指定位置,然后操作人员通过校靶镜观察口目视对应靶板上的靶标位置,此方式测试结果受主观意识干扰较大,且易受环境光线影响,易受操作人员观察角度影响,且长时间观察易对操作人员眼睛产生伤害。考虑到操作人员不同重复精度不可控,且校靶数据无法保存,无法后期追溯。当需要测量靶标偏差位置时还需借助激光照射和卷尺进行测量。
3、综合上述问题,本发明设计了一种全新的靶标特征校准方法。使用相机代替人眼进行图像采集,然后利用算法识别提取出靶标特征,最后再计算出所需角度和位置。通过配置相机参数可以减小外部环境及光线影响,保证图像质量的统一稳定。通过相机与校靶镜间连接夹具,锁定相机位置来保证图像重复采集精度的统一稳定。
技术实现思路
1、本发明提出了一种基于图像识别的靶标特征提取方法,以解决背景技术提到的问题。
2、为实现上述目的,本发明提供如下技术方案:
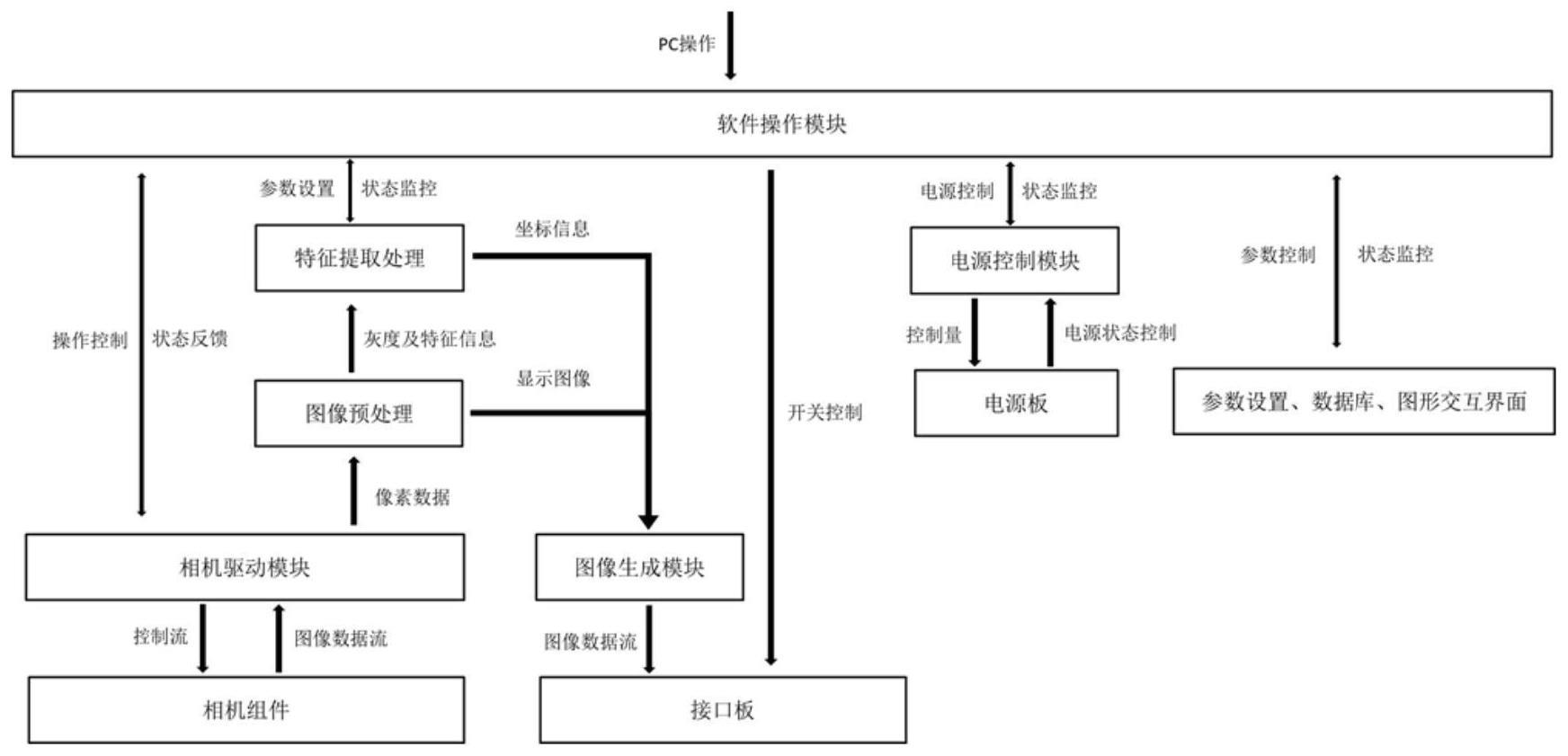
3、一种基于图像识别的靶标特征提取方法,包含以下步骤:把相机及必备供电控制模块集成后代替人眼固定到校靶镜上,当设备使用时把校靶镜插进连接夹具中,安装好校靶镜后启动电源及软件设备开始工作,然后通过平板获取实时图像数据,由算法进行目标的特征处理、增强、提取、计算,最终按照用户设置方式输出偏差值,软件接收到pc操作信息后开始控制相机调整参数,再将相机采集到的图像数据上传到图像预处理模块,对其进行位置校正、旋转、画面增强,然后把处理后的像素数据发送给特征提取模块进行目标特征提取、处理,处理后的结果和图像会传输到图像生成模块,由其拟合成待显示图像,并由pc控制经接口板发送到显示器。
4、作为本发明的进一步技术方案:包括相机驱动模块、图像预处理模块、图像特征提取模块、图像拟合模块、电源控制模块、参数设置模块、数据库模块和人机交互界面。
5、作为本发明的进一步技术方案:所述图像特征提取模块的核心算法包含特征关键点检测模块和靶标深度匹配模块。
6、作为本发明的进一步技术方案:所述相机驱动模块分别连接相机组件、软件操作模块和图像预处理模块。
7、作为本发明的进一步技术方案:所述电源控制模块与电源板连接,用于电源状态控制。
8、作为本发明的进一步技术方案:所述图像生成模块分别连接特征提取处理模块、图像预处理模块和接口板。
9、作为本发明的进一步技术方案:所述图像预处理模块分别连接相机驱动模块和特征提取处理模块。
10、与现有技术相比,本发明的有益效果是:
11、基于本方法的算法对靶标的识别提取精度较高,且设备构造简单小巧、使用方便,极大地提高了测试效率和测试精度。
技术特征:
1.一种基于图像识别的靶标特征提取方法,其特征在于,包含以下步骤:把相机及必备供电控制模块集成后代替人眼固定到校靶镜上,当设备使用时把校靶镜插进连接夹具中,安装好校靶镜后启动电源及软件设备开始工作,然后通过平板获取实时图像数据,由算法进行目标的特征处理、增强、提取、计算,最终按照用户设置方式输出偏差值,软件接收到pc操作信息后开始控制相机调整参数,再将相机采集到的图像数据上传到图像预处理模块,对其进行位置校正、旋转、画面增强,然后把处理后的像素数据发送给特征提取模块进行目标特征提取、处理,处理后的结果和图像会传输到图像生成模块,由其拟合成待显示图像,并由pc控制经接口板发送到显示器。
2.根据权利要求1所述的一种基于图像识别的靶标特征提取方法,其特征在于,包括相机驱动模块、图像预处理模块、图像特征提取模块、图像拟合模块、电源控制模块、参数设置模块、数据库模块和人机交互界面。
3.根据权利要求2所述的一种基于图像识别的靶标特征提取方法,其特征在于,所述图像特征提取模块的核心算法包含特征关键点检测模块和靶标深度匹配模块。
4.根据权利要求3所述的一种基于图像识别的靶标特征提取方法,其特征在于,所述相机驱动模块分别连接相机组件、软件操作模块和图像预处理模块。
5.根据权利要求4所述的一种基于图像识别的靶标特征提取方法,其特征在于,所述电源控制模块与电源板连接,用于电源状态控制。
6.根据权利要求5所述的一种基于图像识别的靶标特征提取方法,其特征在于,所述图像生成模块分别连接特征提取处理模块、图像预处理模块和接口板。
7.根据权利要求6所述的一种基于图像识别的靶标特征提取方法,其特征在于,所述图像预处理模块分别连接相机驱动模块和特征提取处理模块。
技术总结
本发明公开了一种基于图像识别的靶标特征提取方法,包含以下步骤:把相机及必备供电控制模块集成后代替人眼固定到校靶镜上,当设备使用时把校靶镜插进连接夹具中,安装好校靶镜后启动电源及软件设备开始工作,然后通过平板获取实时图像数据,由算法进行目标的特征处理、增强、提取、计算,最终按照用户设置方式输出偏差值,本发明基于深度学习实现背景刻线0位与靶标特征提取,通过大样本特征学习,可以显著提高靶标和背景标0位的识别精度,算法对光照、拍摄角度等变化具有较强的鲁棒性,同时在算法结构设计上采用了轻量级神经网络模型进行构建,算法推理速度快、占用内存少、资源消耗低。
技术研发人员:范玉朋,李跃飞
受保护的技术使用者:中航华东光电(上海)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!