一种可展开式天线的振动预测与抑制系统
本发明属于天线振动抑制,尤其涉及一种可展开式天线的振动预测与抑制系统。
背景技术:
1、目前,应用于天线中的振动抑制系统往往针对于单一种类的可可展开式天线,如桁架式、肋式等。在天线结构改变时,其理论模型通用性较差,无法兼顾多结构种类的天线。
2、此外,现有的振动抑制系统通常不具备对振动进行预测的功能,在复杂的空间环境中,难以预测热载荷、卫星运动带来的加速度载荷等诱发天线振动的因素,并无法对这些因素进行预测,以及进行超前的振动抑制控制。这些本可预测的因素与无法预测的随机载荷在现有的振动抑制系统中被归为一类处理,极大程度的降低了振动抑制系统的效果和效率。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种可展开式天线的振动预测与抑制系统,通过振动预测和振动抑制,实现了系统内部对载荷扰动和位移振动预测结果的验证和修正,以及对天线的超前振动抑制控制和实时振动抑制控制,解决了现有天线振动抑制系统通用性差且振动抑制分类单一的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
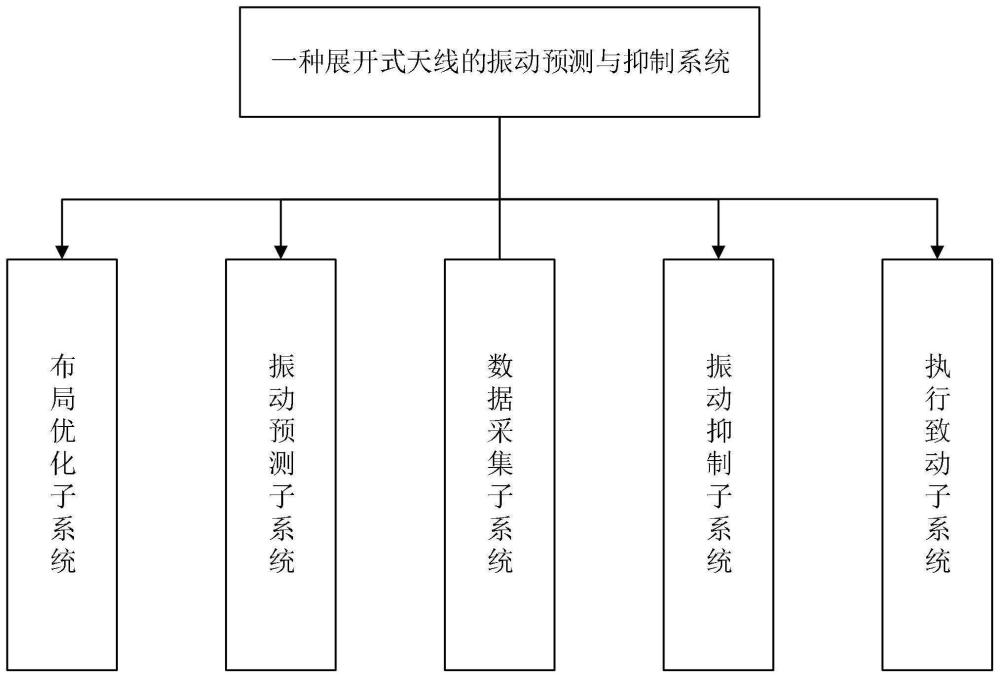
3、本发明提供的一种可展开式天线的振动预测与抑制系统,包括:
4、布局优化子系统,用于基于天线结构的数值模型,优化压电陶瓷致动器的数量和位置,得到布局方案;
5、振动预测子系统,用于基于布局方案、天线结构参数和预设的卫星运行轨道,构建训练集和载荷扰动预测网络,并利用载荷扰动预测网络和振动理论预测模型,得到预测载荷扰动和预测位移振动;
6、数据采集子系统,用于实时测量得到天线温度和随机载荷扰动导致的天线位移,并将其转换为位移信号和温度信号;
7、振动抑制子系统,用于根据位移信号和温度信号验证预测载荷扰动和预测位移振动,并根据振动预测的验证结果修正训练集中的数据,以及基于预测载荷扰动、预测位移振动、随机载荷扰动和位移信号控制状态空间方程,分别得到需超前施加的驱动电压信号和需实时施加的驱动电压信号;
8、执行致动子系统,用于根据需超前施加的驱动电压信号和需实时施加的驱动电压信号,对天线进行超前振动抑制控制和实时振动抑制控制。
9、本发明的有益效果为:本发明提供的一种可展开式天线的振动预测与抑制系统,通过布局优化子系统能够实现根据不同种类天线的结构参数进行整体结构的数值模型构建,并对天线布局进行优化,得到优化后的布局方案,实现了适应不同种类的可展开的天线,大大提升了系统对天线的振动预测和振动抑制的通用性;本发明通过振动预测子系统,对天线振动抑制中可预测的因素划分出并进行预测,得到预测载荷扰动和预测位移振动,为天线的超前振动抑制控制提供基础;本发明通过数据采集子系统获取天线实时的随机载荷扰动、位移信号和温度信号,并基于振动抑制子系统通过位移信号和温度信号验证预测载荷扰动和预测位移振动,并针对性修正训练集,以确保用于振动抑制的预测结果的准确性,从而确保天线的超前振动抑制控制的准确性;本发明通过振动抑制子系统分别利用可预测因素和不可预测的实时因素分别控制状态空间方程,得到了需超前施加的驱动电压信号和需实时施加的驱动电压信号,并利用执行致动子系统分别完成了超前振动抑制控制和实时振动抑制控制,实现了对根据导致天线振动因素的可预测性对天线振动抑制控制进行对应分类并抑制控制。
10、进一步地,所述布局优化子系统包括:
11、第一模块,用于根据天线结构参数,建立天线有限元模型,得到天线整体结构的总体刚度矩阵、质量矩阵和阻尼矩阵;
12、第二模块,用于组建天线整体结构的总体刚度矩阵、质量矩阵和阻尼矩阵,得到天线结构的数值模型;
13、第三模块,用于基于天线结构的数值模型,预设能够设置压电陶瓷致动器的天线杆件的编号范围,并将压电陶瓷致动器的杆件数和杆件编号作为优化变量,将系统能量和控制能量的和作为布局优化目标;
14、第四模块,用于基于优化算法对优化变量和布局优化目标进行优化,并选择压电陶瓷致动器数量最少且布局优化目标最小的优化结果作为布局方案。
15、采用上述进一步方案的有益效果为:本发明中根据天线的结构参数建立有限元模型,并组建得到天线结构的数值模型,能够有效适应各种可可展开式天线,提升系统的通用性,且通过对压电陶瓷致动器的数量和位置进行优化,实现了在天线质量和成本等条件限制下,最大化提高系统的振动抑制能力。
16、进一步地,所述振动预测子系统包括:
17、第五模块,用于根据天线结构参数和布局方案,建立具有压电陶瓷致动器的天线有限元模型;
18、第六模块,用于基于预设的卫星运行轨道和具有压电陶瓷致动器的天线有限元模型,得到轨道上各个位置天线受到的加速度载荷和热载荷;
19、第七模块,用于基于卫星运行轨道上各位置天线受到的加速度载荷和热载荷,得到天线在卫星运行轨道上各位置对应的预设载荷扰动;
20、第八模块,用于基于天线在卫星运行轨道上各位置对应的预设载荷扰动,得到天线的位移;
21、第九模块,用于基于天线在卫星运行轨道上各位置对应的预设载荷扰动和位移振动构建训练集和初始pinn物理神经网络,并利用训练集训练初始pinn物理神经网络,得到载荷扰动预测网络;
22、第十模块,用于利用载荷扰动预测网络对卫星运行轨道上任意位置进行预测,得到对应位置的预测载荷扰动;
23、第十一模块,用于利用振动理论预测模型基于预测载荷扰动进行故障预测,得到对应位置的预测位移振动。
24、采用上述进一步方案的有益效果为:本发明根据天线结构种类和优化得到的布局方案建立了具有压电陶瓷致动器的天线有限元模型,并基于其在预设卫星运行轨道的位置上的载荷扰动建立了训练集和pinn物理神经网络,通过训练集的训练得到了载荷扰动预测网络,能够极快地得到天线在预设卫星运行轨道上不同位置对应的预测载荷扰动,此预测载荷扰动即为对应位置原本的预设载荷扰动,避免了针对不同在轨位置每次重新进行有限元计算效率低下的影响,实现了划分出造成天线振动的可预测因素,并预测出可预测因素造成的载荷扰动和位移振动。
25、进一步地,所述数据采集子系统包括:
26、第十二模块,用于利用设置在天线各个杆件中的压电陶瓷传感器和激光位移传感器进行实时测量,得到间隙、碰撞和控制过程中产生的随机载荷扰动导致的天线位移;
27、第十三模块,用于利用设置在天线各个杆件中的热传感器在测量得到天线的位移量的同时,测量得到天线温度;
28、第十四模块,将天线位移和天线温度转换为振动抑制子系统能够识别的位移信号和温度信号。
29、采用上述进一步方案的有益效果为:本发明通利用压电陶瓷传感器、激光位移传感器和热传感器,实现了对随机载荷导致的位移和天线的温度变化进行精确的实时测量,为预测载荷扰动和预测位移振动的准确修正以及针对天线的实时实际振动进行振动抑制控制提供基础,有效提升了振动理论预测模型的准确性以及天线振动抑制控制的实时性和准确性。
30、进一步地,所述振动抑制子系统包括:
31、第十五模块,用于接收位移信号和温度信号,并基于位移信号和温度信号验证预测载荷扰动和预测位移振动,得到振动预测的验证结果;
32、第十六模块,用于针对振动预测的验证结果大于或等于预设的预测偏离阈值时,对训练集中的数据进行修正,直至预测的验证结果小于预设的预测偏离阈值;
33、第十七模块,用于根据天线结构参数和布局方案,建立天线、压电陶瓷致动器和传感器的状态空间方程;
34、第十八模块,用于利用预测载荷扰动和预测位移振动控制状态空间方程,得到需超前施加的驱动电压信号;
35、第十九模块,用于利用随机载荷扰动和位移信号对应的实际位移振动控制状态空间方程,得到需实时施加的驱动电压信号。
36、采用上述进一步方案的有益效果为:本发明通过预测载荷扰动、预测位移振动、随机载荷扰动和位移信号对应的实际位移振动控制状态空间方程,得到制动器的控制信号,从而为致动器超前加载反向载荷实现变刚度式的超前控制,以及对超出预测的随机振动实现实时控制。
37、进一步地,所述状态空间方程的构建方法包括如下步骤:
38、s1、根据布局方案,得到压电陶瓷致动器矩阵u、压电陶瓷传感器矩阵y和模态空间位移和速度矩阵x;
39、所述压电陶瓷致动器矩阵u、压电陶瓷传感器矩阵y和模态位移和速度矩阵x的计算表达式分别如下:
40、u=[u1 ub]
41、y=[y1 yc]
42、x=[q1 qn q1 qn]t
43、其中,u1表示第1个压电陶瓷致动器的输入电压,ub表示第b个压电陶瓷致动器的输入电压,b表示压电陶瓷致动器的数量,y1表示第1个压电陶瓷传感器的输出,yc表示第c个压电陶瓷传感器的输出,c表示压电陶瓷传感器的数量,q1表示第1个模态空间的位移,qn表示第n阶模态空间的位移,q1表示第1个模态空间的速度,qn表示第n阶模态空间的速度,n表示选取的模态截断阶数;
44、s2、根据天线结构参数,得到天线结构矩阵a;
45、所述天线结构矩阵a的计算表达式如下:
46、
47、ω=diag[ω1ωn],δ=diag[ζ1ω1ζnωn]
48、其中,0n×n表示n行n列的零矩阵,in×n表示n行n列的单位矩阵,ω表示天线结构的固有圆频率矩阵,diag[]表示对角矩阵,ω1表示天线结构的第1阶固有圆频率,ωn表示天线结构的第n阶固有圆频率,δ表示由n阶阻尼系数与固有圆频率相乘组成的对角矩阵,ζ1表示天线结构的第1阶阻尼系数,ζn表示天线结构的第n阶阻尼系数;
49、s3、基于布局方案获取振型、压电动作参数和传感系数参数,得到振型压电动作矩阵b和振型传感系数矩阵c;
50、所述振型压电动作矩阵b的计算表达式如下:
51、
52、其中,0n×1表示n行1列的零矩阵,表示除去0矩阵之后的b矩阵中的第1行第1列的元素,表示除去0矩阵之后的b矩阵中的第1行第b列的元素,表示除去0矩阵之后的b矩阵中的第n行第1列的元素,表示除去0矩阵之后的b矩阵中的第n行第b列的元素,01×n表示1行n列的零矩阵,表示除去0矩阵之后的c矩阵中的第1行第1列的元素,表示除去0矩阵之后的c矩阵中的第1行第n列的元素,表示除去0矩阵之后的c矩阵中的第1行第n列的元素,表示除去0矩阵之后的c矩阵中的第c行第n列的元素;
53、s4、基于压电陶瓷致动器矩阵u、压电陶瓷传感器矩阵y、模态空间位移和速度矩阵x、天线结构矩阵a、振型压电动作矩阵b和振型传感系数矩阵c,构建状态空间方程;
54、所述状态空间方程的计算表达式如下:
55、x=ax+bu,y=cx
56、其中,x表示压电陶瓷传感器的电压。
57、采用上述进一步方案的有益效果为:本发明提供的状态空间方程是基于天线、压电陶瓷致动器和压电陶瓷传感器构建的整个系统的状态空间方程,能够根据天线预测的或实时的扰动载荷和位移振动,得到压电陶瓷致动器需施加的驱动电压信号,以实现为加载振动反向载荷和完成振动抑制提供计算基础。
58、进一步地,所述执行致动子系统包括:
59、第二十模块,用于根据需超前施加的驱动电压信号,利用压电陶瓷致动器在天线的各位置加载对应的平衡载荷,完成超前振动抑制控制;
60、第二十一模块,用于根据需实时施加的驱动电压信号,利用压电陶瓷致动器在天线的各位置加载对应的平衡载荷,完成实时振动抑制控制。
61、采用上述进一步方案的有益效果为:本发明通过将引起振动的因素有效分类,并分别针对性的进行了振动发生前和振动发生时的有效抑制控制,提升了系统振动抑制控制的准确度和效率。
62、针对于本发明还具有的其他优势将在后续的实施例中进行更细致的分析。
- 还没有人留言评论。精彩留言会获得点赞!