一种基于TSF-Transformer-LS的HRRP序列识别方法
本发明涉及hrrp序列识别方法,具体是指一种基于tsf-transformer-ls的hrrp序列识别方法。
背景技术:
1、传统的hrrp序列识别方法,依赖于人工提取特征,前人致力于通过挖掘可分辨性高的人工特征提高识别精度。如一种基于双谱特征向量的识别方法,选择类间可分离性最大的双谱作为信号的特征向量,避免了有害双谱造成的不良影响。一种基于双分布复合统计模型的识别方法,根据散射中心模型的距离单元中优势散射点的数量,将距离单元划分为三种统计类型,将不同类型距离单元的回波建模为对应的分布形式来完成识别任务。一种基于微多普勒双相干特征的识别方法,所提方法从雷达回波中的微多普勒贡献中提取倒谱系数,使用双相干估计计算分类特征。一种基于隐马尔可夫模型的识别方法,从高分辨率雷达信号幅度与目标距离剖面中提取了六个功率谱特征,使用隐马尔可夫模型进行识别。人工特征提取的方法需要大量先验知识作为支撑,对研究人员的主观因素的依赖较强,对特征的表达能力有限,所以识别精度不高。为了克服人工特征提取存在的局限性,将机器学习的方法引入hrrp识别任务。一种基于支持向量机的识别方法,根据混淆矩阵给出的分类器之间的距离,定义不同的分类器置信度,然后将支持向量机的值和后验概率整合到基本概率分配中,实现了支持向量机与证据理论结合的识别方法。一种基于极限学习机的识别方法,引入l21范数减少数据点噪声和异常值的不良影响,使学习到的极限学习机模型更加稳定。机器学习的方法实现了自动提取特征,但以上方法将hrrp数据独立地进行特征提取,忽略了hrrp序列之间相关性和时序信息,造成了信息损失,且机器学习的方法提取深层特征能力较弱,识别性能仍然有待提高。
2、所以,一种基于tsf-transformer-ls的hrrp序列识别方法成为人们亟待解决的问题。
技术实现思路
1、本发明要解决的技术问题是现有的hrrp序列识别方法将hrrp数据独立地进行特征提取,忽略了hrrp序列之间相关性和时序信息,造成了信息损失,且机器学习的方法提取深层特征能力较弱,识别性能仍然有待提高。
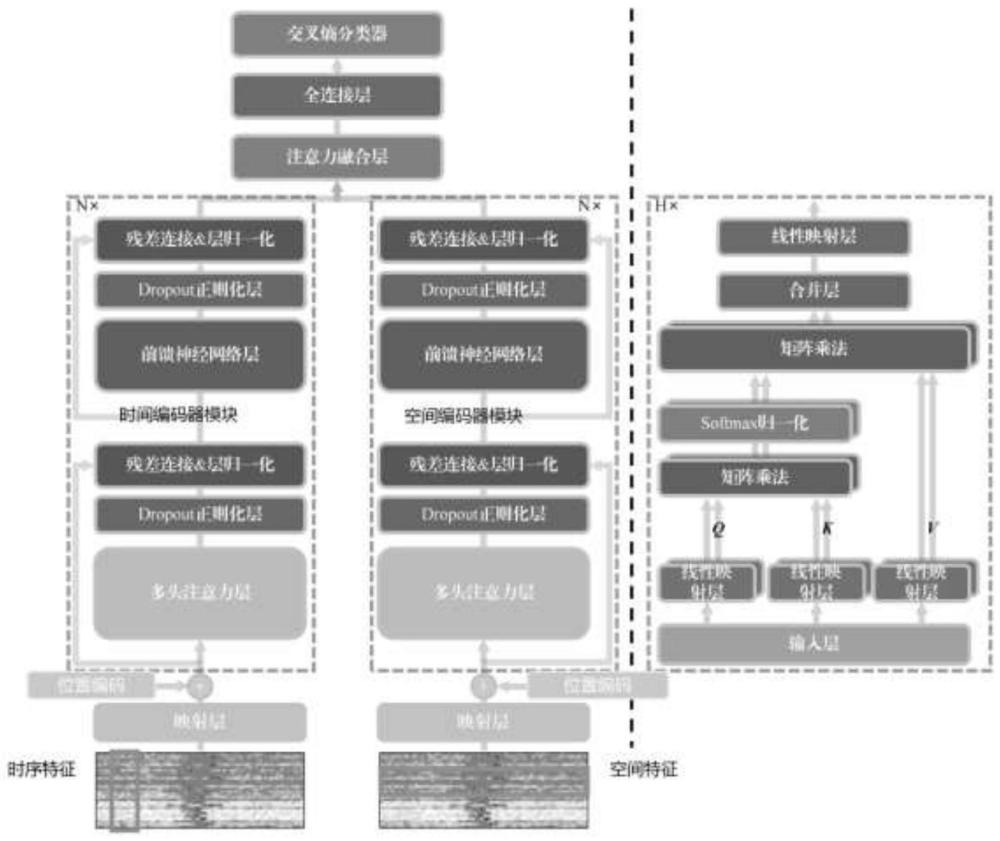
2、为解决上述技术问题,本发明提供的技术方案为:一种基于tsf-transformer-ls的hrrp序列识别方法,包括tsf-transformer-ls的整体结构和hrrp序列识别方法,所述tsf-transformer-ls的整体结构包括时间编码器模块、空间编码器模块和时空特征融合及识别模块;所述时间编码器模块和空间编码器模块的编码器用于特征提取,通过堆叠编码器提取深层时间和空间的全局特征,将时间特征和空间特征作为输入,经时空特征融合及识别模块进行特征融合和识别;
3、所述hrrp序列识别方法如下所示:
4、以序列x=[x1,x2,...,xn]t作为输入,序列的维度为n×c,其中n为hrrp序列长度,c为序列中每个元素的通道维度;
5、首先对序列内的元素经过高维线性映射从c维处理为dmodel维;
6、ytoken=xwe (1)
7、式中,ytoken为线性映射后的序列,通道的维度为dmodel;为线性映射的矩阵;通过高维线性映射,能够将信息聚合到高维表示中,有利于自注意力机制进行特征提取;通过位置编码,为ytoken增加可学习的位置信息矩阵得到具有位置信息的高维序列y;
8、以y作为输入,由堆叠的编码器进行特征提取,得到transformer堆叠n个编码器并输出深层全局特征o,其中时间编码器模块输出时间全局特征ot,空间编码器模块输出空间全局特征os,通过注意力融合机制实现时空特征融合,时间特征和空间特征权重的计算过程为:
9、af=softmax([ot,os]wf) (2)
10、将时间特征和空间特征与af加权得到融合后的时空融合特征为:
11、ofusion=[ot,os]af (3)
12、时空融合特征包含丰富的时间和空间特征,具有更高的分辨能力,最后将时空融合特征作为输入,使用softmax进行分类。
13、进一步的,所述编码器由多头注意力层、dropout正则化层、残差连接&层归一化、前馈神经网络层组成;
14、所述多头注意力层包括输入层、若干线性映射层、矩阵乘法、softmax归一化、合并层;
15、将嵌入位置信息的高维序列y=[y1,y2,...,yn]中的每个元素通过映射,得到查询向量q=ywq,键向量k=ywk和值向量v=ywv,其中dh表示第h个注意力头的维度,通过q,k,v计算序列元素之间的注意力权值矩阵
16、
17、使用注意力权值矩阵对值向量加权求得自注意力模块输出的加权序列值;
18、sh(x)=av (5)
19、多头注意力模块为h个注意力模块对输入序列进行处理,并将各个输出结果串行连接为:
20、mh(x)=[sh1(x),sh2(x),...,shh(x)]wmh (6)
21、式中,参数矩阵mh(x)为多注意力模块的输出结果;多头注意力模块将嵌入位置信息的高维向量组成的序列,通过可学习的参数矩阵分裂为查询向量,键向量和值向量,通过查询向量和键向量计算序列元素之间的相关性得到注意力权值矩阵,将值向量与注意力权值矩阵进行运算得到单头注意力模块的输出,通过合并单头注意力模块的输出得到多头注意力模块的输出结果;
22、将多头注意力模块的输出与输入完成残差连接和层归一化处理后,作为ffn输入,ffn包含三层,第一层先将输入映射到高维空间,第二层使用非线性激活层增强对特征的非线性表达能力,第三层再进行降维处理,过程为:
23、el=(relu(ln(mh+y)·w1))w2 (7)
24、ol=ln(el+(ln(mh+y)) (8)
25、式中,ol第l个encoder的输出,分别为两层维度变换的参数矩阵,ln(·)为层归一化函数;堆叠的encoder为串行连接,将上一个encoder的输出作为输入,最终输出深层全局特征。
26、进一步的,所述hrrp序列由连续方位角的hrrp数据组成,hrrp序列随着方位角的变化而动态改变,不同的目标呈现出不同的趋势和规律,通过人工提取微小变化的深层时序信息难度较大;
27、为了提取hrrp序列之间的时序信息,以hrrp序列r=[r1,r2,...,rn]t为输入,其中n=32为hrrp序列的长度,ri表示第i个方位角的hrrp数据,其包含128个距离单元;编码器对hrrp序列之间的时间相关性进行建模,计算各方位角hrrp之间的相关性,通过提取hrrp序列的动态时序变化信息,时间编码器模块通过堆叠n层编码器挖掘hrrp序列深层时序全局特征,实现对hrrp序列的长程时序关系的有效表达。
28、进一步的,所述hrrp序列中每个方位角的hrrp数据由128个距离单元组成,距离单元的幅度信息表示雷达探测目标时获取的回波强度,包含目标中丰富的空间结构信息;同时,在真实场景下的hrrp数据包含大量噪声区域,局部噪声信息会严重混淆目标区域的可分辨信息,为进一步增强对hrrp序列的信息提取能力,利用空间编码器模块对hrrp序列的空间全局信息进行提取,以关注hrrp数据长程关系,自适应地提取目标区域地重要信息,抑制了噪声区域的不良影响;
29、为了提取hrrp序列每个方位角的距离单元之间的空间信息,对hrrp序列r进行转置操作,以rt为输入,距离单元序列的长度为128,序列中各元素由相同距离单元的幅度值构成,维度为32;编码器对距离单元之间的空间相关性进行建模,计算各距离单元之间的长程相关性,从而自适应地提取目标区域的空间信息,抑制噪声区域的影响;空间编码器模块通过堆叠n层encoder挖掘距离单元序列深层空间全局特征,实现对hrrp序列的长程空间关系的有效表达。
30、进一步的,所述transformer是基于自注意力机制的深层网络,需要通过大量训练样本提取目标的高可分辨信息,但是当前hrrp序列样本数量有限,在有限样本的情况下,真实场景下的hrrp处于复杂的噪声环境下,相同目标的hrrp仍存在一定差异,导致transformer应用于hrrp序列识别任务极容易出现过拟合问题;为了解决所提方法的过拟合问题,引入label smoothing正则化策略,为增加标签噪声,避免模型过度依赖训练样本,增强所提方法在真实场景下应用的泛化性能;
31、label smoothing通过soft one-hot来为标签增加噪声,从而减少真实样本标签在计算损失时的比重,最终实现抑制过拟合问题;增加label smoothing后,soft one-hot标签的概率分布为:
32、
33、式中,k表示多分类任务中的类别总数,i表示类别数,ε是超参数;
34、在计算预测值和真实值标签时,交叉熵损失函数的计算方式如下:
35、
36、式中,pi为真实值的概率,qi为预测值的概率;
37、神经网络在训练过程中会使得模型向损失值小的方向优化,但是过度依赖训练集数据,会降低在真实场景下hrrp序列的识别任务的泛化性能,经过label smoothing的损失函数,会避免网络过度自信,减缓对损失的惩罚强度,其各类别的损失函数计算为:
38、
39、故在训练神经网络时,最小化预测值和真实值的交叉熵损失函数时得到最优的预测概率分布为:
40、
41、式中,k表示多分类任务中的类别总数,ε是超参数,α为任意实数;
42、从预测概率分布得出,使用label smoothing能够增加对真实值和预测值存在误差的容忍度,使得模型的泛化性能增强。
43、本发明与现有技术相比的优点在于:本发明使用时间编码器模块和空间编码器模块同时提取hrrp序列的时间和空间的长程相关性,有效增强对目标区域的重要信息的提取能力,抑制噪声区域的不良影响,利用时空融合特征提高识别性能,并通过残差连接避免深层网络的信息丢失问题;本发明实现连接更高的识别性能和更好的鲁棒性;利用labelsmoothing为标签增加模糊噪声,避免了模型对训练样本过度依赖,进一步增强了泛化性能本发明涉及合理,值得大力推广。
- 还没有人留言评论。精彩留言会获得点赞!