针对鱼眼图像执行机器视觉任务的方法、装置及介质与流程
本公开涉及机器视觉技术,尤其是一种针对鱼眼图像执行机器视觉任务的方法、装置及介质。
背景技术:
1、自动驾驶技术在车辆等移动设备上的应用越来越广泛,鱼眼相机是自动驾驶技术中常见的视觉传感器,由于鱼眼相机采集的鱼眼图像畸变严重,鱼眼相机采集的鱼眼图像通常仅用于泊车场景。
技术实现思路
1、为了解决相关技术中鱼眼相机采集的鱼眼图像仅能用于泊车场景,适用范围窄的技术问题,提出了本公开。本公开的实施例提供了一种针对鱼眼图像执行机器视觉任务的方法、装置及介质。
2、根据本公开实施例的一个方面,提供了一种针对鱼眼图像执行机器视觉任务的方法,包括:
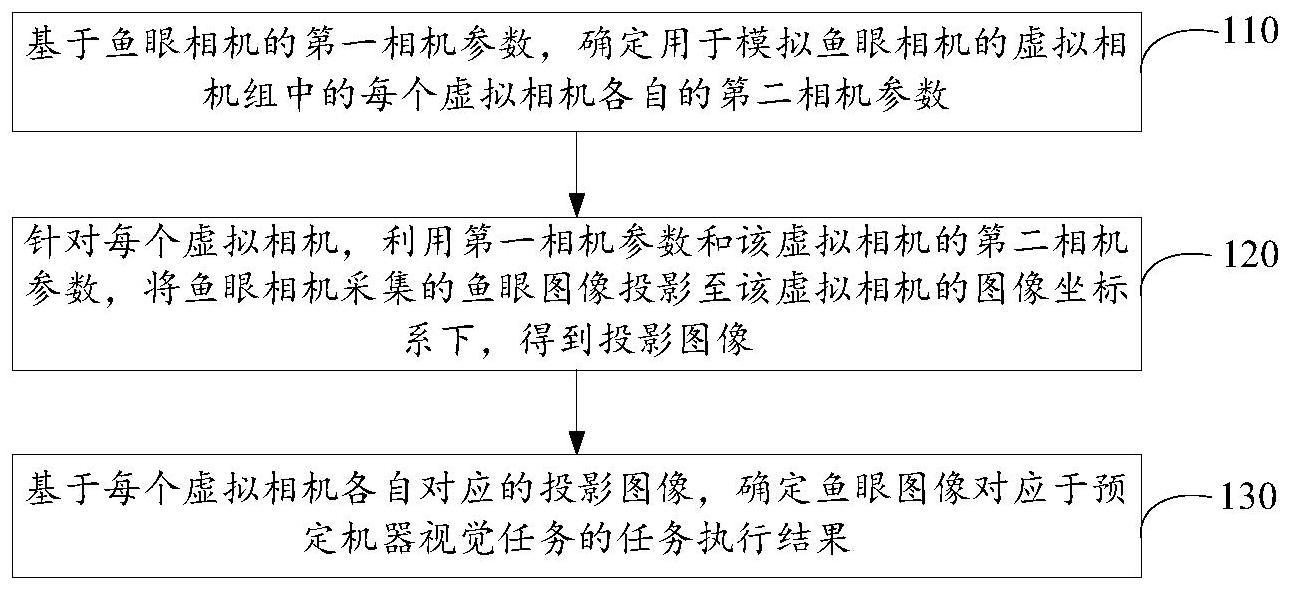
3、基于鱼眼相机的第一相机参数,确定用于模拟所述鱼眼相机的虚拟相机组中的每个虚拟相机各自的第二相机参数;
4、针对每个所述虚拟相机,利用所述第一相机参数和该虚拟相机的所述第二相机参数,将所述鱼眼相机采集的鱼眼图像投影至该虚拟相机的图像坐标系下,得到投影图像;
5、基于每个所述虚拟相机各自对应的所述投影图像,确定所述鱼眼图像对应于预定机器视觉任务的任务执行结果。
6、根据本公开实施例的另一个方面,提供了一种针对鱼眼图像执行机器视觉任务的装置,包括:
7、第一确定模块,用于基于鱼眼相机的第一相机参数,确定用于模拟所述鱼眼相机的虚拟相机组中的每个虚拟相机各自的第二相机参数;
8、投影模块,用于针对每个所述虚拟相机,利用所述第一相机参数和所述第一确定模块确定的该虚拟相机的所述第二相机参数,将所述鱼眼相机采集的鱼眼图像投影至该虚拟相机的图像坐标系下,得到投影图像;
9、第二确定模块,用于基于所述投影模块得到的每个所述虚拟相机各自对应的所述投影图像,确定所述鱼眼图像对应于预定机器视觉任务的任务执行结果。
10、根据本公开实施例的再一个方面,提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述针对鱼眼图像执行机器视觉任务的方法。
11、根据本公开实施例的又一个方面,提供了一种电子设备,所述电子设备包括:
12、处理器;
13、用于存储所述处理器可执行指令的存储器;
14、所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现上述针对鱼眼图像执行机器视觉任务的方法。
15、根据本公开实施例的又一个方面,提供了一种计算机程序产品,当所述计算机程序产品中的指令被处理器执行时,执行上述针对鱼眼图像执行机器视觉任务的方法。
16、基于本公开上述实施例提供的针对鱼眼图像执行机器视觉任务的方法、装置、介质、电子设备及计算机程序产品,通过虚拟相机组对鱼眼相机进行模拟,可以将鱼眼相机采集的鱼眼图像转换为符合小孔成像效果的若干投影图像,针对这些投影图像所组成的图像组执行预定机器视觉任务,即相当于针对鱼眼图像执行了预定机器视觉任务,这样一方面能够避免鱼眼图像的畸变对任务执行造成的不利影响,另一方面能够复用基于针孔相机的诸多技术手段(例如针对针孔相机采集的图像开发的神经网络模型),因此有利于扩大鱼眼图像的适用范围,使得鱼眼图像不仅可以用于泊车场景,还可以应用于行车场景(例如在行车过程中进行障碍物检测、障碍物跟踪等)。
技术特征:
1.一种针对鱼眼图像执行机器视觉任务的方法,包括:
2.根据权利要求1所述的方法,其中,所述基于鱼眼相机的第一相机参数,确定用于模拟所述鱼眼相机的虚拟相机组中的每个虚拟相机各自的第二相机参数,包括:
3.根据权利要求2所述的方法,其中,所述基于所述第一视场角和所述第一相机外参,确定所述虚拟相机组中的每个所述虚拟相机各自的第二相机外参,包括:
4.根据权利要求3所述的方法,其中,所述基于所述第一视场角、所述虚拟相机视场角和所述第一相机外参,确定满足预设条件的所述虚拟相机的所述第二相机外参,包括:
5.根据权利要求3所述的方法,其中,所述基于所述第一视场角和预设的第二视场角,确定虚拟相机视场角和所述虚拟相机组包括的相机数量,包括:
6.根据权利要求3所述的方法,其中,所述基于所述第一视场角、所述虚拟相机视场角和所述相机数量,确定相邻视场重合角度,包括:
7.根据权利要求2所述的方法,其中,所述基于所述第一视场角和预设相机内参,确定每个所述虚拟相机各自的第一相机内参,包括:
8.根据权利要求1所述的方法,其中,所述虚拟相机组中的任一所述虚拟相机表示为目标虚拟相机,所述目标虚拟相机对应的所述投影图像表示为目标投影图像;
9.根据权利要求8所述的方法,其中,所述基于所述第二相机内参、所述第一相机外参、所述第一相机内参和所述第二相机外参,确定所述目标虚拟相机的图像坐标系下的二维位置与所述鱼眼相机的图像坐标系下的二维位置之间的第一映射关系,包括:
10.根据权利要求8所述的方法,其中,所述目标投影图像中的任一个像素点表示为目标像素点;
11.根据权利要求1至10中任一项所述的方法,其中,所述基于每个所述虚拟相机各自对应的所述投影图像,确定所述鱼眼图像对应于预定机器视觉任务的任务执行结果,包括:
12.根据权利要求1至10中任一项所述的方法,其中,所述基于每个所述虚拟相机各自对应的所述投影图像,确定所述鱼眼图像对应于预定机器视觉任务的任务执行结果,包括:
13.一种针对鱼眼图像执行机器视觉任务的装置,包括:
14.一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1至12中任一所述的针对鱼眼图像执行机器视觉任务的方法。
15.一种电子设备,所述电子设备包括:
技术总结
公开了一种针对鱼眼图像执行机器视觉任务的方法、装置及介质,其中,方法包括:基于鱼眼相机的第一相机参数,确定用于模拟鱼眼相机的虚拟相机组中的每个虚拟相机各自的第二相机参数;针对每个虚拟相机,利用第一相机参数和该虚拟相机的第二相机参数,将鱼眼相机采集的鱼眼图像投影至该虚拟相机的图像坐标系下,得到投影图像;基于每个虚拟相机各自对应的投影图像,确定鱼眼图像对应于预定机器视觉任务的任务执行结果。本公开的实施例可以扩大鱼眼图像的适用范围,使得鱼眼图像不仅可以用于泊车场景,还可以应用于行车场景。
技术研发人员:李博文,武斌
受保护的技术使用者:上海安亭地平线智能交通技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!