一种基于点云的三维重建方法和系统与流程
【】本发明涉及三维重建,尤其涉及一种基于点云的三维重建方法和系统。
背景技术
0、
背景技术:
1、近年来,点云被广泛应用于各个领域。在基于点云对对象进行三维重建的方法中,通常会获取对象的多个角度的图片信息,基于图片信息生成对应的多个角度的点云,分别对邻近角度的点云进行配准,进而拼接所有角度的点云生成对象的三维点云。
2、在对邻近角度的点云进行配准的过程中,可能会存在重合度低于期望程度的点云区域。现有技术中,在确定出重合度低于期望程度的点云区域后,对重合度低于期望程度的点云区域进行分割,进而对重合度低于期望程度的点云区域进行局部配准,使用上述方法对点云进行区域分割时的数据处理量较大,容易导致邻近角度的点云的配准效率不高。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明实施例提供了一种基于点云的三维重建方法和系统,用以提高邻近角度的点云的配准效率。
2、第一方面,本发明实施例提供了一种基于点云的三维重建方法,包括:
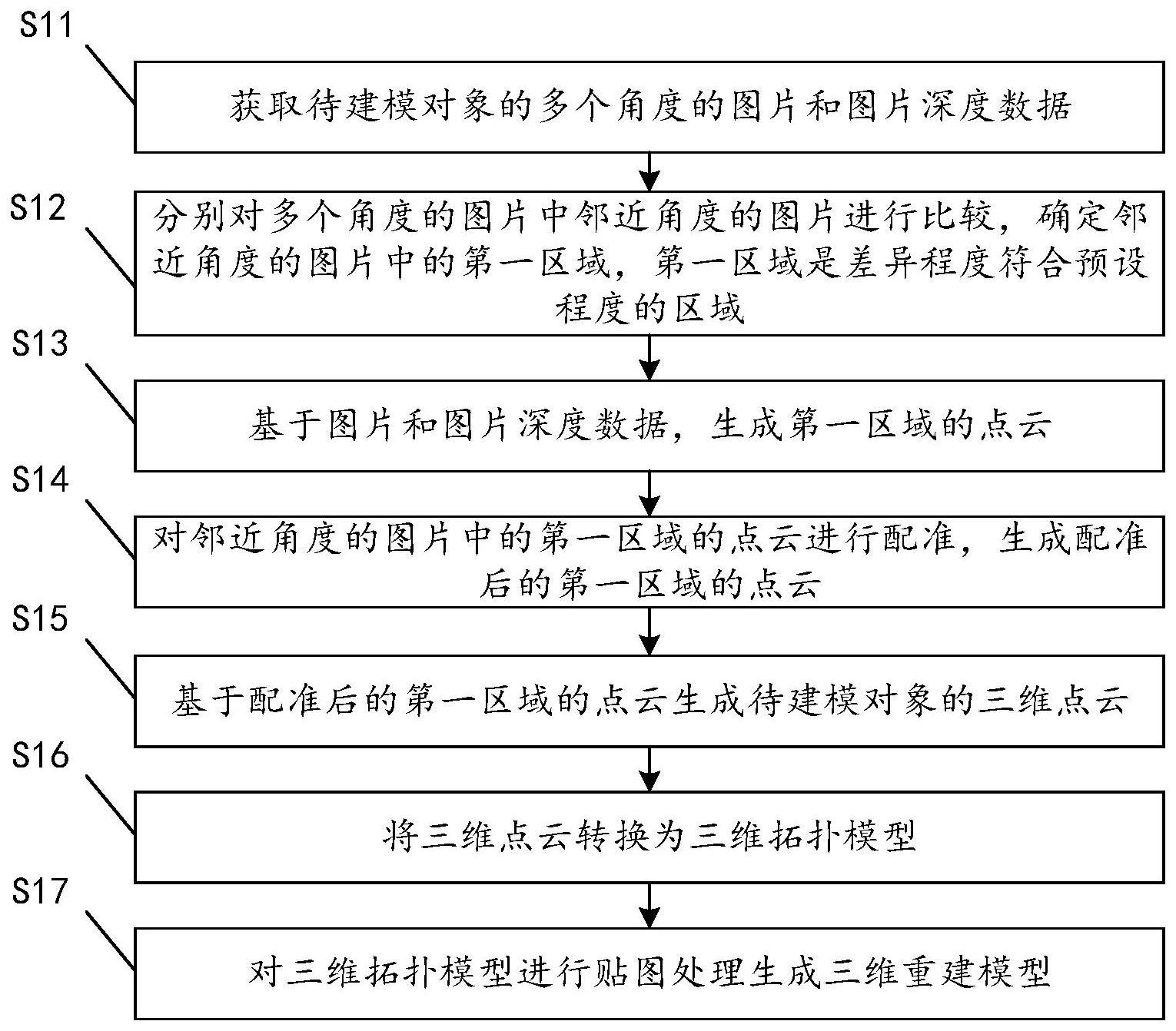
3、获取待建模对象的多个角度的图片和图片深度数据;
4、分别对所述多个角度的图片中邻近角度的图片进行比较,确定所述邻近角度的图片中的第一区域,所述第一区域是差异程度符合预设程度的区域;
5、基于所述图片和图片深度数据,生成所述第一区域的点云;
6、对所述邻近角度的图片中的所述第一区域的点云进行配准,生成配准后的第一区域的点云;
7、基于所述配准后的第一区域的点云生成所述待建模对象的三维点云;
8、将所述三维点云转换为三维拓扑模型;
9、对所述三维拓扑模型进行贴图处理生成三维重建模型。
10、在一种可能的设计中,所述邻近角度的图片符合预设的重合度要求。
11、在一种可能的设计中,所述分别对所述多个角度的图片中邻近角度的图片进行比较,确定所述邻近角度的图片中的第一区域,包括:
12、基于所述待建模对象的关节结构,和/或,待建模对象的语义,分别将所述邻近角度的图片中的待建模对象划分成多个区域,比较所述邻近角度的图片中的待建模对象对应的所述多个区域,确定出所述多个区域中差异程度符合预设程度的第一区域。
13、在一种可能的设计中,所述差异程度包括所述待建模对象的关节结构向量位置差异程度、中心点位置差异程度和颜色值差异程度中的至少一个。
14、在一种可能的设计中,所述分别对所述多个角度的图片中邻近角度的图片进行比较之后,还包括:
15、确定所述邻近角度的图片中的第二区域,所述第二区域是差异程度不符合预设程度的区域。
16、在一种可能的设计中,所述生成所述第一区域的第一区域的点云之前,还包括:
17、基于所述第一区域和所述第二区域分别对所述邻近角度的图片和图片深度数据进行分割,分别得到只包含所述第一区域的第一图片和第一图片深度数据,以及,只包含第二区域的第二图片和第二图片深度数据。
18、在一种可能的设计中,所述基于所述第一区域和所述第二区域分别对所述邻近角度的图片和图片深度数据进行分割,包括:
19、通过分割算法分别生成所述第一区域和所述第二区域对应的遮罩,基于所述第一区域和所述第二区域对应的遮罩分别分割所述邻近角度的图片和图片深度数据。
20、在一种可能的设计中,基于所述第一区域和所述第二区域分别对所述邻近角度的图片和图片深度数据进行分割,分别得到只包含所述第一区域的第一图片和第一图片深度数据,以及,只包含第二区域的第二图片和第二图片深度数据之后,包括:
21、基于所述第一图片和第一图片深度数据,生成所述第一区域的点云;
22、基于所述第二图片和第二图片深度数据,生成所述第二区域的点云。
23、在一种可能的设计中,所述基于所述第二图片和第二图片深度数据,生成所述第二区域的点云之后,还包括:
24、对所述邻近角度的图片中的所述第二区域的点云进行配准,生成配准后的第二区域的点云。
25、在一种可能的设计中,所述对所述邻近角度的图片中的所述第二区域的点云进行配准,生成配准后的第二区域的点云,包括:
26、确定所述邻近角度的图片中第二区域的点云的坐标系之间的第二转换矩阵,基于所述第二转换矩阵配准所述邻近角度的图片中的所述第二区域的点云。
27、在一种可能的设计中,所述对所述邻近角度的图片中的所述第一区域的点云进行配准,生成配准后的第一区域的点云,包括:
28、确定所述邻近角度的图片中第一区域的点云的坐标系之间的第一转换矩阵,基于所述第一转换矩阵配准所述邻近角度的图片中的所述第一区域的点云。
29、在一种可能的设计中,所述对所述邻近角度的图片中的所述第二区域的点云进行配准,生成配准后的第二区域的点云之后,还包括:
30、基于所述配准后的第一区域的点云和所述配准后的第二区域的点云生成所述待建模对象的三维点云。
31、在一种可能的设计中,所述基于所述配准后的第一区域的点云和所述配准后的第二区域的点云生成所述待建模对象的三维点云,包括:
32、基于第一转换矩阵和第二转换矩阵将所述第一区域和第二区域的点云拼接至同一视角坐标系中,生成所述待建模对象的三维点云。
33、在一种可能的设计中,所述将所述三维点云转换为三维拓扑模型,包括:
34、通过算法将所述三维点云转换为三维拓扑模型,所述算法包括泊松重建算法和三角剖分算法中的其中一个。
35、在一种可能的设计中,所述对所述三维拓扑模型进行贴图处理生成三维重建模型,包括:
36、基于第一图片和第二图片的位置信息和角度信息,结合投影算法,确定所述三维拓扑模型的uv空间;
37、基于所述uv空间对所述三维拓扑模型进行贴图处理生成三维重建模型。
38、第二方面,本发明实施例提供了一种基于点云的三维重建系统,应用于上述方法,包括:
39、数据采集模块,用于获取待建模对象的多个角度的图片和图片深度数据;
40、数据对比模块,用于分别对所述多个角度的图片中邻近角度的图片进行比较,确定所述邻近角度的图片中的第一区域,所述第一区域是差异程度符合预设程度的区域;
41、点云生成模块,用于基于所述图片和图片深度数据,生成所述第一区域的点云;
42、点云配准模块,用于对所述邻近角度的图片中的所述第一区域的点云进行配准,生成配准后的第一区域的点云;
43、点云拼接模块,用于基于所述配准后的第一区域的点云生成所述待建模对象的三维点云;
44、模型转换模块,用于将所述三维点云转换为三维拓扑模型;
45、模型贴图模块,用于对所述三维拓扑模型进行贴图处理生成三维重建模型。
46、第三方面,本发明实施例提供了一种非暂时性计算机可读存储介质,所述非暂时性计算机可读存储介质包括存储的程序,在所述程序运行时控制所述非暂时性计算机可读存储介质所在设备执行第一方面所述的基于点云的三维重建方法。
47、第四方面,本发明实施例提供了一种计算机设备,所述计算机包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现第一方面所述的基于点云的三维重建方法。
48、本发明实施例提供的基于点云的三维重建方法的技术方案中,获取待建模对象的多个角度的图片和图片深度数据;分别对多个角度的图片中邻近角度的图片进行比较,确定邻近角度的图片中的第一区域,第一区域是差异程度符合预设程度的区域;基于图片和图片深度数据,生成第一区域的点云;对邻近角度的图片中的第一区域的点云进行配准,生成配准后的第一区域的点云;基于配准后的第一区域的点云生成待建模对象的三维点云;将三维点云转换为三维拓扑模型;对三维拓扑模型进行贴图处理生成三维重建模型。本发明实施例提供的技术方案中,通过将邻近角度的图片作比较,确定出差异程度符合预设程度的区域,进而基于图片和图片深度数据生成区域点云以进行局部配准,无需对点云进行区域分割,提高了邻近角度的点云的配准效率。
- 还没有人留言评论。精彩留言会获得点赞!