基于船舶AIS数据的耙吸挖泥船参数分析及工艺识别方法与流程
本发明涉及轨迹分析,具体涉及一种利用耙吸船船舶自动识别系统(ais)所提供的船舶航行轨迹和gis信息数据,进行施工流程识别和工艺分析的方法和系统。后续还将进一步公开基于本发明基础算法的应用技术方案。
背景技术:
1、现有技术介绍一
2、信息技术和数据挖掘与疏浚行业深度融合,是推动疏浚行业高质量增长和可持续发展的有力支撑。在船舶自动识别系统(ais,automatic identification system)的应用与普及过程中,通过ais数据进行航迹分析、船舶状态判别逐渐成为热潮。ais数据由船舶通过ais跟踪系统广播关于自身的动态信息,包括经度、纬度、对地航速、对地航向、航行状态;以及静态信息,包括mmsi编号、船舶尺寸等,该数据可通过数据api获得,并导入轨迹数据库中。
3、我国疏浚行业的发展已经进入到质效提升和装备更新升级的高质量发展阶段,以耙吸挖泥船为代表的典型疏浚装备的核心性能和工艺参数是其中的关键。主要关注的有(1)耙吸船的挖泥航速、时长,(2)吹填航速、时长,
4、(3)满载或空载最大航速。其中:
5、(1)挖掘不同土质时,为达到最佳挖泥效率,会选择是否开启高压冲水,以及对应的挖泥航速也不同,即导致挖泥时长的不同。国内疏浚船在施工中对于航速的控制较为鲁莽,未见到较好地总结成型的不同土质下最佳航速,往往施工效果比国外疏浚船舶差。
6、(2)吹填航速、时长则可以看出选用吹填的方式,若航速在保持在0-0.1节,时长在1.5h以上,多为选择接管吹填;若航速在0.1~1节,时长在1h内,则多为艏喷方式吹填。通过统计其他公司疏浚船舶对于相同工程的吹填方式选择,通过数据挖掘可总结特定工程的最优吹填方法。
7、(3)满载或空载最大航速的统计则可以针对有新建船舶需求时,对应船舶舱容等级参考设计的最大航速。
8、以上关注的工艺参数均为后续船舶的施工、建造具有指导意义。
9、现有技术介绍二
10、目前,对于船舶轨迹识别研究,大多针对海上交通运输船舶的轨迹模式在实际水上运输情景中较为简单的行为状态进行识别分析,如货船、交通船的惯性运输航线,其表现为单一的抵港、离港行为识别等。现有研究方法也多采用如dbscan、gmm、k邻近算法和k-means等聚类算法,该类算法仅能实现对轨迹数据进行简单的聚类分析。
11、以耙吸挖泥船为代表的疏浚工程船舶,除了具有类似海上交通船舶的交通航行行为之外,主要的船舶行为是开展各类疏浚工程的施工,包括复杂的施工工艺流程,涉及到多种工艺行为参数。传统的分析方法在进行基于航行行为数据的多参数分析时,由于存在各参数权重占比不具备普遍的代表性、聚类个数设置较随机等问题,使得工程船舶的行为数据被简单聚类分析,仍然需要人工判断哪些部分需要合并的缺陷,导致分析结果不准确,无法对船舶航行过程背后所代表的施工流程进行有效的识别,不满足疏浚工程中的现实需求。可见,不论是现有船舶类研究成果,还是相关研究方法,均无法满足对工艺环节识别及其参数分析的要求。
12、现有技术介绍三
13、经检索,目前已形成的研究中,与本发明相关的技术有:
14、(1)名称:船舶行为轨迹识别方法,公告号:cn 108334905 a。该方法识别流程为:1.选定船舶行驶海域,对海域进行区域划分;2.将历史轨迹数据根据划分后的海域运用转角法进行轨迹分割;3.将分割后的轨迹片段集进行误差逆传播多层前馈网络集合聚类,获取典型轨迹模式;4.计算待识别轨迹与聚类后的典型轨迹模式的hausdoff距离,该计算距离若小于等于阈值,则判定为属于典型轨迹模式,反之则不属于。该识别方法的不足之处为:1.该方法轨迹识别需要前期训练,且训练建立在指定被监控海域,一旦船舶行驶超出该海域,则该分析方法/系统不再适用;2.仅能判断轨迹是否为典型行驶轨迹,未提及对于其他行为的判断能力。因此该方法对于全海域耙吸船施工行为判别无适用性。
15、(2)名称:船舶行为识别系统、方法和平台,公告号:cn 112785030 a。该方法识别流程为:1.将多方来源的ais数据进行异常数据监测剔除再存入数据库;2.根据航速结合经纬度判断船舶锚泊、靠泊、航行3种状态,将所有时间点数据匹配对应状态标签;3.靠泊与锚泊状态数据根据其停留时间进一步判别是否为修理或加油状态。此方法的不足之处在于:1.首先仅为船舶的状态划分,其状态包含类别也简单且单一,具有局限性;2.发明中也未提及划分状态后数据结果如何呈现及其各状态时间分配等,未体现出其发明的意义性、指导性。同样对于耙吸船轨迹分析帮助不大。
16、(3)名称:一种基于航迹数据的耙吸挖泥船施工轨迹识别方法,公告号:cn114118243a。该方法利用dbscan算法与gmm算法分别将轨迹点的经纬度、航速、航向三种参数进行自上而下逐层聚类,首先识别出施工区,进一步划分装舱,抛泥,运泥轨迹,最终区分往抛泥区与返装舱区轨迹,将各轨迹簇打标签。此方法的不足之处在于:1.识别内容虽适用于耙吸船的施工行为,但由于没考虑耙吸船疏浚施工的工艺逻辑,仅采用鲁棒性的聚类算法其结果往往会出现同一船次挖泥行为被聚类为两次,且其判别行为类型中遗漏了吹填行为2.未提及对于各行为参数的统计分析,对于后续优化工艺不具备指导性。
17、通过对现有轨迹分析方法的检索,可以发现目前常规的分析方法较为简单地使用聚类算法,由于缺乏工艺逻辑,分析/识别内容有限,无法准确区分“挖、抛、吹、运”四个动作环节及各环节关键施工参数。
技术实现思路
1、因此,针对耙吸船ais轨迹数据分析需求与难点,现提出一种基于ais数据的耙吸船施工流程识别及工艺参数分析方法,可以自动识别耙吸船施工中“挖、抛、吹、运”四个动作环节,以及统计分析其对应关键施工参数,计算精度高,为耙吸船运营效率分析和优化管理决策提供技术支持。
2、为实现上述目的,本发明算法基于船舶自动识别系统的耙吸船施工流程识别及工艺参数分析方法,以耙吸船ais数据为基础,结合耙吸船施工工艺标准(如航速<4节、持续时长为0.5-2.5h,为挖泥环节;航速<0.1节、持续时长在0.5h以上,为吹填环节;在15分钟内船艏向180°变化、航速自10节先减小后增大,为抛泥环节),利用数据挖掘技术手段,针对耙吸挖泥船在疏浚工程开展过程中产生的海量历史航行轨迹数据和gis数据,获取后形成船舶轨迹数据库,进行“挖、抛、吹、运”4大施工环节识别,并统计分析各环节关键施工参数为目标,为挖掘国外耙吸船核心控制技术、提升国内耙吸船运营管理水平、推动国内疏浚行业高效率标准化发展提供有效依据和关键数据。
3、为实现上述目的,本发明提出一种基于ais数据的耙吸船施工工艺识别方法,结合工艺逻辑、细节、流程,采用统计与时序分层的处理方法,通过空间、航速、航向,不断划分轨迹集合、缩小识别范围,最终完成识别“挖、抛、吹、运”四种耙吸疏浚工艺过程,并根据数据的gis信息进行工艺参数分析,识别其具体施工行为以及参数。
4、本发明技术方案:
5、一种基于船舶ais数据的耙吸挖泥船参数分析及工艺识别方法,其特征在于,包括以下步骤:
6、步骤1,耙吸挖泥船航行轨迹数据提取
7、由船舶轨迹数据库中提取选定耙吸船轨迹数据,可自定义输出轨迹数据集的时间跨度以及数据密度;其中,时间跨度是指不同时间段的ais数据;数据密度指各轨迹点的时间间隔;
8、步骤2,航行轨迹数据预处理
9、对轨迹数据集进行预处理,剔除异常点;
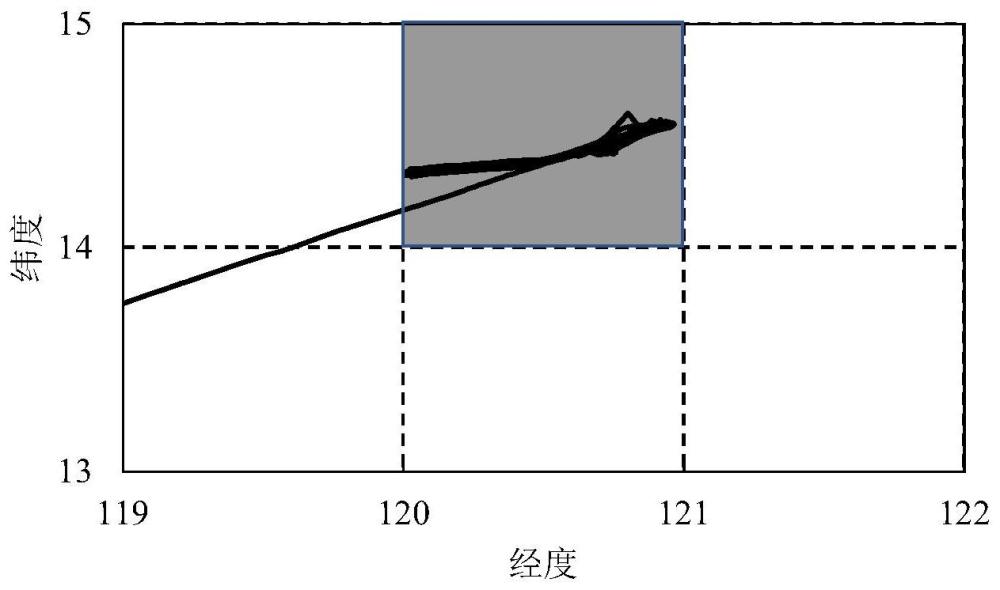
10、步骤3,基于耙吸挖泥船施工行为特征进行施工区域识别
11、将轨迹数据集进行识别为施工区、停泊区以及调遣三类轨迹;
12、施工航迹是指-轨迹点集中在某一区域内形态呈条带状,轨迹密集且多重叠,小范围内含有大量航速<4节的轨迹点;
13、停泊航迹是指-轨迹点集中在靠近港口的某一点位,航速均为0;
14、调遣航迹是指-轨迹点航速始终>10节,相邻轨迹点间距离大,无重叠轨迹;
15、步骤4,施工起止时间识别
16、选定一个施工区网格,输出该网格对应时序轨迹集的第一点与最后一点,分别标记为施工开始时间与施工停止时间,同时输出该施工区的地理位置信息;
17、步骤5,施工工艺流程的区域信息识别
18、挖泥航迹是指-时长超过0.5h的连续轨迹点航速均在0.1节~4节;
19、抛泥航迹是指-在时长为0.25h内的连续轨迹船首向改变超过120°,同时耙吸船航速自10节先减小后增大;
20、吹填航迹是指-时长超过0.5h的连续轨迹点航速均在0节~0.1节;
21、识别挖泥区轨迹数据集、抛泥区轨迹数据集、吹填区轨迹数据集,剩余轨迹点写入两区往返轨迹数据集,用于分别进入步骤6、步骤7和步骤8;
22、步骤6,工程类型判别
23、由步骤5识别的挖泥区与抛泥区(吹填区),判别工程类别:若存在吹填区则默认该工程为吹填工程;若识别为挖泥区与抛泥区则计算两个区与近岸点距离,当挖泥区离该点较近则为疏浚工程,反之则为吹填工程;
24、步骤7,空载、满载数据集划分
25、由步骤5划分的挖泥区与抛泥区(吹填区)定义空载与满载的航向,空载为自抛泥区(吹填区)->挖泥区,记作hogk;满载为自挖泥区->抛泥区(吹填区),记作hogm。以此为判断条件,计算两区往返轨迹数据集内轨迹点船首向与hogk、hogm差的绝对值大小,若与hogk差的绝对值较小则该点列入空载轨迹数据集,若与hogm差的绝对值较小则该点列入满载轨迹数据集;
26、步骤8,将各轨迹数据集分割存储为一次动作轨迹片段簇
27、对步骤5、步骤7输出的各数据集一次动作轨迹分割,将数据点总集合分为一次动作的集合,得到的4组轨迹数据集,分别为:挖泥区轨迹集、抛泥区/吹填区轨迹数据、空载轨迹数据集和满载轨迹数据集;根据对象条件将其分割,储存为一次动作的轨迹片段簇集合;
28、所述对象条件均为:在时序数据集内,当某轨迹点与上一轨迹点时间差大于30min,则认为此点为新一次动作起始点,在此分割轨迹数据集,此点至上一分割点为上一次动作,此点至下一分割点为本次动作;遍历所有数据,即可完成将轨迹数据集分割为每次动作对应一子轨迹片段,最终得到一次动作的轨迹片段簇集合;
29、步骤9.由以上各动作轨迹片段簇集合计算得到各个施工工艺参数,包括运距、各环节一次动作平均航速、最大/最小航速,平均时长;
30、步骤10.利用步骤6、步骤9输出的关键工艺参数,预估施工土质与施工工艺;
31、具体的,计算得到的挖泥航速与推荐表的经验数据比较,根据推荐表逻辑输出预估的值。
- 还没有人留言评论。精彩留言会获得点赞!