一种基于灰狼优化算法的步行荷载人体动力参数识别方法
本发明涉及结构振动响应计算与控制领域,尤其涉及一种基于灰狼优化算法的步行荷载人体动力参数识别方法。
背景技术:
1、伴随着结构设计方法的进步、高强轻质材料的应用以及建筑施工技术的发展,现代建筑结构追求“轻质大跨”的特点已经成为共识,结构设计呈现出从承载力极限状态控制向正常使用极限状态控制转变的趋势,可预见人致结构振动舒适度问题会愈发普遍。因此,准确地预测人致结构振动响应和结构振动特性是评估结构振动舒适度的必要前提。然而,人致结构振动响应的准确性与人致荷载模型息息相关。目前各设计规范提出的人致荷载模型多基于确定性,忽略了行人个体之间的差异性,即忽略了人致荷载的随机性,势必会影响人致结构振动响应的准确性,尤其是考虑人-结构耦合作用时。
2、为便于人致结构振动舒适度分析时能考虑人致荷载的随机性及个体差异并提高结构振动响应的计算精度,可采用倒立摆模型模拟人体步行全过程。倒立摆模型是一种简化的人体步行模型,它将人体视为一个倒立摆系统,可以准确地模拟人体在步行过程中的运动和力学响应,从而提高人致结构振动响应的计算精度。此外,倒立摆模型还可以有效地考虑人致荷载的随机性和个体差异性,为评估结构振动舒适度问题提供可靠的计算基础。
3、倒立摆模型具有精度高、适用性广、可考虑人-结构耦合作用等特点,尤其是能考虑步行姿态、人体刚度、质量、高度等参数的随机性。但是基于倒立摆模型建立的步行荷载需事先明确人体动力参数(刚度kleg,长度l0,滚轴半径r,质量m和初始速度v0),且各参数具有随机性,即涉及多参数多目标优化问题。采用传统的线性加权法、优先级法、理想点法等优化算法识别人体动力参数时,各分目标函数的最优解往往是互相独立的,很难同时实现最优。而倒立摆模型模拟步行荷载的准确性与人体动力参数的有效性息息相关,若能确定人体动力参数的最优值,将极大改善步行荷载的模拟结果,从而提高结构振动响应的计算精度,对大跨度、长悬臂、轻柔结构的设计具有重要的意义,因此有必要提出一种新的步行荷载人体动力参数识别方法。
技术实现思路
1、为解决上述技术背景中提出的问题,本发明提供一种基于灰狼优化算法的步行荷载人体动力参数识别方法。
2、为实现上述目的,本发明提供了如下技术方案,具体包括以下步骤:
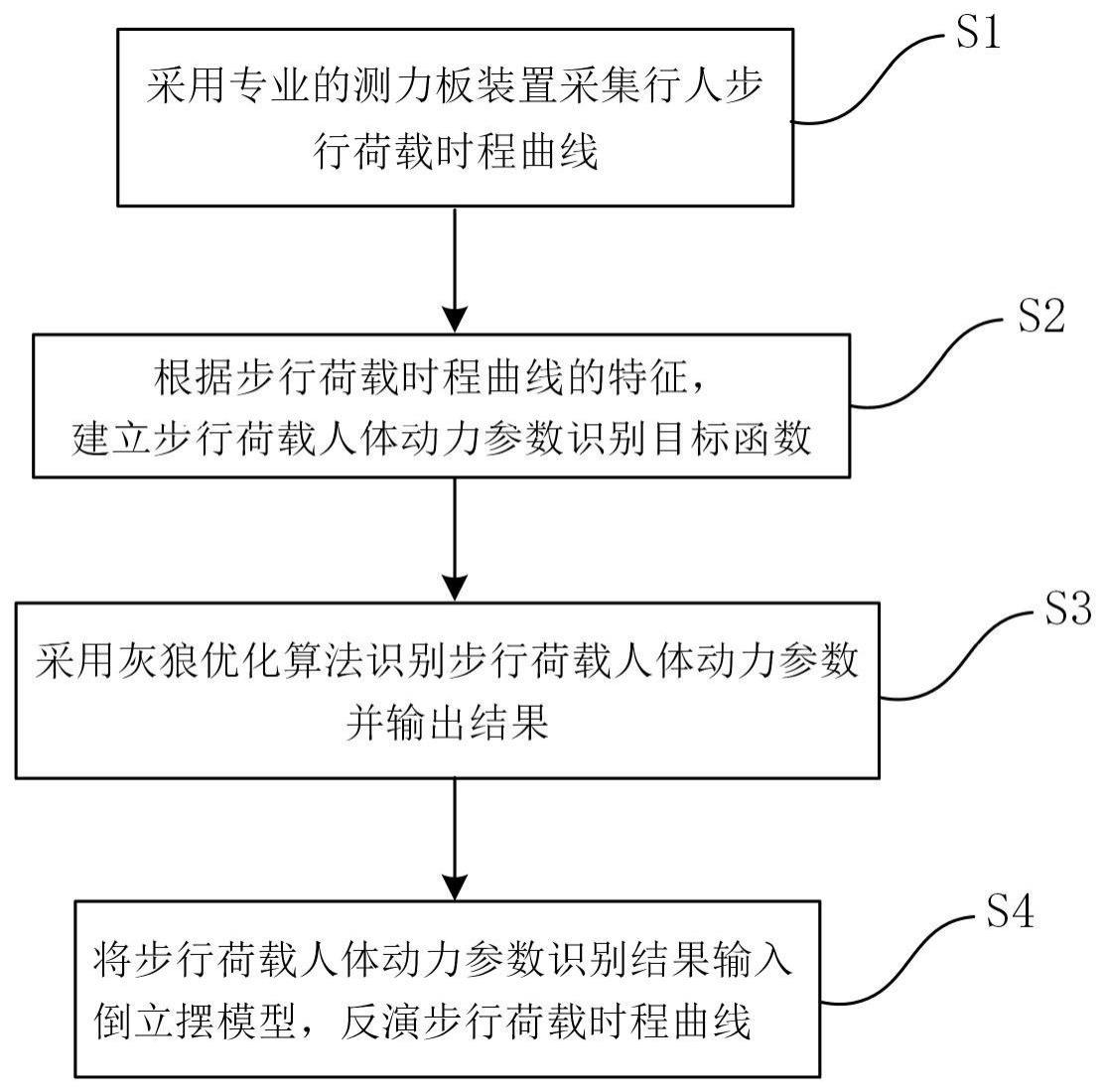
3、s1、采用专业的测力板装置采集行人步行荷载时程曲线;
4、s2、根据步行荷载时程曲线的特征,建立步行荷载人体动力参数识别目标函数;
5、s3、采用灰狼优化算法识别步行荷载人体动力参数并输出结果;
6、s4、将步行荷载人体动力参数识别结果输入倒立摆模型,反演步行荷载时程曲线。
7、优选的,步骤s1中,采用专业的测力板装置采集行人步行荷载时程曲线,具体为:
8、首先测量每一位测试者的身高、体重等参数并进行记录,之后利用高精度测力板(力传感器型号为me-k3d160,量程为±5kn)和数据采集仪(型号为dh5922n),采集测试者在自然行走状态下的步行荷载时程曲线,包括步行荷载的横向分量及竖向分量。
9、优选的,步骤s2中,根据步行荷载时程曲线的特征,建立步行荷载人体动力参数识别目标函数,具体为:
10、由于步行荷载时程曲线的分布呈“m”型特征,即存在两个波峰和一个波谷,为了准确描述步行荷载的特征,建立如下目标函数:
11、
12、式中:fit和fie(i=1,2,3)分别表示步行荷载fi的理论值和试验值,tit和tie(i=1,2,3)分别表示时间ti的理论值和试验值,tpt和tpe分别表示单步持续时间tp的理论值和试验值。
13、优选的,步骤s3中,采用灰狼优化算法识别步行荷载人体动力参数并输出结果,具体为:
14、步骤s301、输入步行荷载试验曲线;
15、步骤s302、提取f1e,f2e,f3e,t1e,t2e,t3e,tpe等参数;
16、步骤s303、输入人体动力参数上/下限,包括长度l0、滚轴半径r、初始速度v0、刚度kleg、冲切角度θ、质量m;
17、步骤s304、设置灰狼优化算法初始参数,包括初始化种群大小m、设置迭代次数t;
18、步骤s305、灰狼优化算法在搜索空间中识别人体动力参数;
19、步骤s306、代入倒立摆模型的运动方程,采用双参数摄动法求解运动方程;
20、步骤s307、确定f1t,f2t,f3t,t1t,t2t,t3t,tpt等参数;
21、步骤s308、判断目标函数值fmin是否小于阈值ε,若是,执行步骤s309,否则返回步骤s303;
22、步骤s309、输出人体动力参数最优值,包括长度l0、滚轴半径r、初始速度v0、刚度kleg、冲切角度θ、质量m。
23、优选的,步骤s301中,输入步行荷载试验曲线,即输入由步骤s1采集得到的步行荷载时程曲线。
24、优选的,步骤s303中,输入人体动力参数上/下限后,即确定了灰狼优化算法的搜索空间,人体动力参数的最优识别结果从搜索空间中获得。
25、优选的,步骤s305中,灰狼优化算法在搜索空间中识别人体动力参数包括以下步骤:
26、步骤s305-1、根据步骤s304设置的灰狼种群大小m,生成灰狼种群的初始位置
27、步骤s305-2、计算初始状态下所有灰狼个体与猎物的距离,并选择距离最小的三只灰狼作为α、β和δ狼,并将他们的位置记为
28、步骤s305-3、更新参数a、和并计算灰狼更新后的位置
29、步骤s305-4、判断是否满足终止条件(达到最大迭代次数),若是,执行步骤s305-5,否则,转入步骤s305-2;
30、步骤s305-5、输出α狼的位置;
31、优选的,步骤s305-1中生成灰狼种群初始位置的公式为:
32、
33、式中j=1,2,3…d为灰狼算法的维数,uj和lj为搜索空间的上限和下限,rand为[0,1]之间的一个随机数。
34、优选的,步骤s305-3中参数a、的计算公式为:
35、
36、其中a是随迭代次数的增加从2线性递减到0的收敛因子,t是迭代次数,t是最大迭代次数,和是各个分量在[0,1]之间的随机向量。
37、优选的,步骤s305-3中计算灰狼更新后的位置的公式为:
38、
39、
40、式中分别为当前灰狼与α、β和δ狼之间的距离。
41、优选的,步骤s306中,将ε2=k/ω1作为摄动参数,倒立摆模型的运动方程为:
42、(1)单支撑阶段:
43、
44、
45、(2)双支撑阶段:
46、
47、
48、
49、
50、其中:
51、ω12=kleg/m (12)
52、式中:x1(t)和x2(t)为弹簧伸缩量,l0为弹簧未变形长度,r为滚轴半径,g是重力加速度,θ1(t)和θ2(t)分别为冲切角度,kleg为弹簧刚度。
53、优选的,步骤s4中,将步行荷载人体动力参数识别结果输入倒立摆模型,反演步行荷载时程曲线,具体为:
54、将步骤s309得到的人体动力参数最优值代入倒立摆模型计算公式,得到反演步行荷载时程曲线。
55、步行荷载竖向分量计算公式为:
56、
57、步行荷载横向分量计算公式为:
58、
59、其中:
60、
61、与现有技术相比,本发明的技术优点是:本发明采用的灰狼优化算法具有全局搜索能力强、收敛速度快、鲁棒性好、算法参数少、并行化能力强等优点,克服了传统算法容易陷入局部最优的缺点,能精准、高效地确定人体动力参数的最优值,从而极大地改善倒立摆模型模拟步行荷载的效果,对提高结构振动响应的计算精度具有重要的现实意义。
- 还没有人留言评论。精彩留言会获得点赞!