一种用于数据处理的飞机尾旋状态判断系统和方法与流程
本发明属于模式识别、飞机复杂状态,涉及一种用于数据处理的飞机尾旋状态判断系统和方法,更具体地说,是一种从海量试飞数据中自动地判断试飞中是否发生尾旋、定位尾旋发生的时刻、提取尾旋试飞数据,并对尾旋的类别进行识别的系统和方法。
背景技术:
1、尾旋是飞机大迎角失速后发生的一种自发的持续偏航运动,且可能伴有绕飞机俯仰、滚转和偏航等三轴的振荡运动,飞机沿半径很小的、很陡的垂直螺旋线轨迹急剧下降,因而尾旋也称为“螺旋”。尾旋运动大致可以分为初始和发展等二个阶段。初始阶段是尾旋运动的开始和过渡的阶段,主要表现为持续的、不稳定的偏航旋转运动,飞行迎角始终超过飞机的失速迎角。随着飞机受到的气动力矩和惯性力矩逐渐平衡,飞机进入到发展阶段,飞机运动参数呈周期性变化。因此,此时可以根据试飞数据中飞机的运动参数识别出尾旋的种类。现代战机的尾旋模式有多种形式,可以采用平均迎角、绕体轴的偏航速率及绕三个轴角振荡幅值的大小等指标来描述。常见的尾旋分类方法包括:根据驾驶员相对地面的姿态,分为正和倒尾旋;根据旋转方向分为左和右尾旋;根据飞机状态参教是否呈现持续周期振荡,分为均匀的、轻度振荡的、振荡的等。
2、现代战机在设计定型试飞、飞行训练和实际飞行过程中,需要完成大量的大迎角或者突破包线的飞行任务,以及专门针对尾旋特性的试飞科目。在完成飞行任务或试飞科目后,需要从大量的试飞数据,判断飞行中是否发生尾旋,进而定位尾旋的发生时刻、提取尾旋发生时的试飞数据,再对其尾旋类型和尾旋特性进行分析评估。
3、然而,受飞机本身、飞行环境的复杂性以及数据采集系统的非理想性等因素影响,在飞行实测数据中不可避免地含有各种随机误差,如野值、高频噪声等,这些误差将会降低尾旋运动识别的准确性与可靠性。因此,需要首先通过数据预处理消除或减小随机误差。针对试飞数据的随机误差,需要开展的数据预处理工作主要包含野值的识别、剔除与补正;数据的低通数字滤波;数据的平滑技术等,从而为下一步开展尾旋识别工作打下基础。
4、此外,目前对试飞数据中飞机尾旋运动的搜索、识别和提取工作,主要由试飞工程师人工完成;且缺乏统一的尾旋判定标准,需要依靠试飞工程师的经验进行识别。由于飞机试飞过程中记录的数据时间长、采样频率大,且识别机动动作涉及的数据变量较多,完全通过人工方式进行识别耗时长;且随着识别时长增加,人工识别负担增加,对尾旋运动的漏判、误判率显著升高。因此,需要开展飞机尾旋运动的自动识别方法研究,开发一种飞机尾旋识别系统,为工程师识别和判断尾旋类型提供参考,减轻工作负担。同时,该系统也可用于实际飞行过程中,对飞机是否发生尾旋以及尾旋的类型进行实时识别和分析,帮助飞行员及时发现尾旋,并为飞行员了解尾旋特征、选择尾旋改出策略提供必要信息。
技术实现思路
1、本发明的目的是从海量试飞数据中自动地判断试飞中是否发生尾旋、定位尾旋发生的时刻、提取尾旋试飞数据,并对尾旋的类别进行识别的系统和方法,从而提高试飞数据的处理效率。
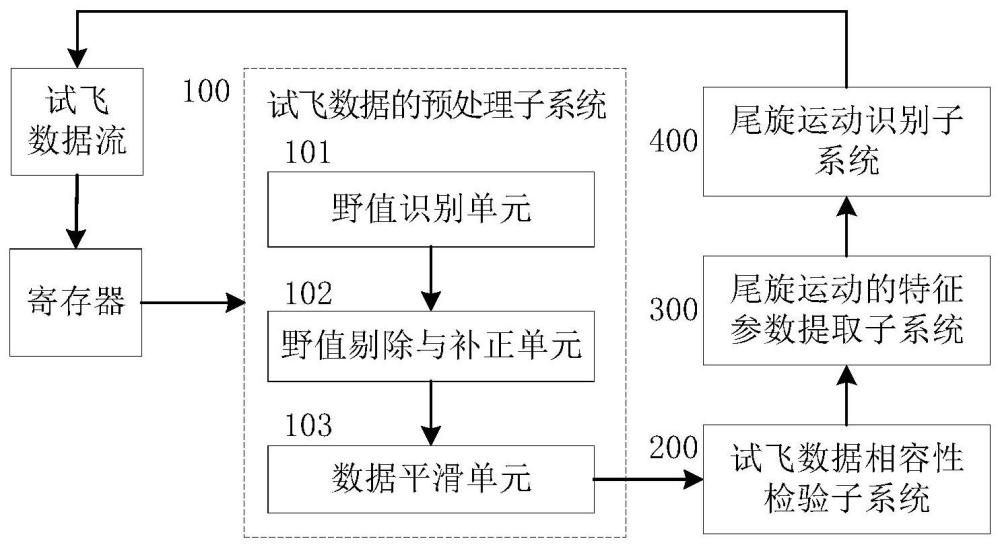
2、本发明技术方案:一种用于数据处理的飞机尾旋状态判断系统,包括试飞数据预处理子系统100、试飞数据相容性检验子系统200、尾旋运动的特征参数提取子系统300和尾旋运动识别子系统400;通过试飞数据的预处理子系统100,对飞机运动状态参数时序数据中的野值进行定位、剔除和补正;并对时序数据进行滤波处理,其次,通过试飞数据相容性检验子系统200,基于最大似然法对多维时序数据之间是否满足飞机运动学规律进行判断,从而对试飞数据测量值大小的误差进行估计并修正。然后,由尾旋运动的特征参数提取子系统300实现参数提取,表征尾旋运动特性。最后,尾旋运动识别子系统400根据尾旋特征参数,判断试飞中是否出现尾旋;若出现,则对出现尾旋的时间点进行定位,并对尾旋种类进行划分。
3、所述试飞数据的预处理子系统100包括野值识别单元101、野值剔除与补正单元102、数据平滑单元103;野值识别单元101识别出试飞数据中偏离真值较大的数据点,输入到野值剔除与补正单元102中,估计该数据点的补正值,使其反映数据的变化趋势;再利用数据平滑单元103去除试飞数据中常含有的高频噪音,以及阶跃性跳变,从而获得平滑的时序数据。
4、所述的飞机尾旋状态判断系统的尾旋判断方法,实现的自动识别试飞数据中尾旋运动的方法为:
5、步骤一:野值识别单元101采用七点二阶多项式滑动拟合方法,对试飞测量数据中偏离真值较大的数据点,即野值,进行识别;
6、步骤二:野值剔除与补正单元102采用六阶拉格朗日插值方法,根据野值出现位置前后的采样点数据求出补正值;
7、步骤三:数据平滑单元103采用傅里叶变换方法对时序数据进行分解和重构,去除试飞数据中常含有的高频噪音,以及由数据采集频率低或存储位数不足导致的数据阶跃性跳变,从而获得平滑的时序数据
8、步骤四:试飞数据相容性检验子系统200采用最大似然估计方法,对多维时序数据之间是否满足飞机运动学规律进行判断,从而对试飞数据测量值大小的误差进行估计,并根据估计的误差对多维试飞数据修正;
9、步骤五:尾旋运动的特征参数提取子系统300采用滑动窗口方法,提取一段时间的试飞数据时间序列;然后,根据尾旋运动的形成机理和表现形式,选取能够表征尾旋运动特性的参数或组合;再根据窗口内的时间序列,计算尾旋运动的特征参数;
10、步骤六:根据尾旋运动的特征参数,尾旋运动识别子系统400采用直接逻辑方法,判断试飞中是否出现尾旋;
11、步骤七:若判定试飞数据中出现尾旋运动,则对出现尾旋的时间点进行定位,并提取出发生尾旋的试飞数据时间序列;解算尾旋运动的主要参数指标,包括平均迎角、绕体轴的偏航速率及绕三个轴角振荡幅值的大小等。最后,根据尾旋运动的主要参数指标,对尾旋种类进行划分。
12、所述步骤一识别试验数据中是否出现了连续野值点。设连续出现野值点的个数上限为m。本发明中连续野值个数的上限取为m=3。若识别出第k个采样点为野值,则将在该点计算得到的标准差σk记为σ’。在判断第k+1个采样点是否为野值时,将第k个采样点的期望值作为观测值yk,代入式(1)中计算第k+1个采样点的期望值则判别准则改写为:
13、
14、若第k+1个采样点满足上式,则判定出现连续野值点。判断第k+2,…,k+m个采样点是否为野值时,若判定结果为第k,k+1,…,k+m个采样点均为野值点,则表明该段数据为阶跃信号,不能将其作为野值剔除。因此,判定第k,k+1,…,k+m个采样点数据不是野值。
15、所述步骤二根据野值点之前的三个点和之后的三个点的观测值,即yk-3,yk-2,yk-1和yk+i+1,yk+i+2,yk+i+3,基于六点拉格朗日插值算法,求出野值点yk,yk+1,…,yk+i的补正值。
16、所述步骤三首先采用傅里叶正变换方法,将经过野值识别、提出和补正处理后的飞行数据从时域变换到频域,得到频域响应数列{yk}。其次,设{yk}数列中第m个数对应的频率为滤波频率ωf,则令{yk}中ym+1之后的数均取为零值。最后,对数列{y’k}进行傅里叶逆变换,得到原飞行数据中低频部分的时域样本{y’n}。
17、所述步骤五提取的尾旋运动特征参数包括迎角α、侧滑角β、飞行速度v、偏航角速率ω、飞机的滚转角速度p、俯仰角速度q、偏航角速度r、飞机的滚转角φ和俯仰角θ和航迹倾角γ。
18、所述步骤六给出的尾旋轨迹工程判别方法,判别内容包含以下几点:
19、■在时长为l=2s的时间窗口内,飞行速度v、偏航角速率ω、迎角α、侧滑角β等飞机状态量的标准差不超过一定范围。可以表示为下式:
20、
21、其中,σx(t)为时间区间[t-l/2,t+l/2]内变量x的标准差。
22、■在时长为l=5s的时间窗口内,飞机滚转角φ和俯仰角θ变化率的平均值,不超过一定范围:
23、
24、式中,μx(t)为时间区间[t-l/2,t+l/2]内变量x的均值。
25、■在时长为l=5s的时间窗口内,偏航角速率的绝对值不小于30°/s;且飞机速度滚转角μ的变化率或航迹偏角χ的变化率,与尾旋时飞机偏航角速率ω基本一致:
26、|μω(t)|≥30°/s (11)
27、
28、■在时长为l=5s的时间窗口内,飞机航迹倾角γ的均值应满足:
29、μγ(t)≤-70° (13)
30、■在时长为l=5s的时间窗口内,飞机俯仰角θ的均值应满足:
31、μθ(t)≥-80° (14)
32、■在时长为l=5s的时间窗口内,飞机迎角的均值μα处于飞机气动参数随迎角线性变化的范围内。
33、本发明的优点:
34、①本发明的一种用于数据处理的飞机尾旋状态判断系统,能够识别、剔除试飞测量数据中偏离真值较大的数据点,并对其进行补充。
35、②本发明的一种用于数据处理的飞机尾旋状态判断系统,能够去除试飞数据中常含有的高频噪音,以及由数据采集频率低或存储位数不足导致的数据阶跃性跳变,从而获得较为平滑的时序数据。
36、③本发明的一种用于数据处理的飞机尾旋状态判断系统,可以根据飞机运动学规律估计试飞数据测量值大小的误差,并根据估计到的误差对多维试飞数据进行修正,为准确识别尾旋打下基础。对于减小飞行员操纵负担、着陆安全等均具有重要意义。
37、④本发明的一种用于数据处理的飞机尾旋状态判断系统,能够在飞行任务完成后,根据试飞数据记录的飞机运动状态参数,自动地检测试飞中是否发生尾旋;并计算尾旋模态的特征参数并进行分类。
38、⑤本发明的一种用于数据处理的飞机尾旋状态判断系统,采用了窗函数提取并寄存一段时间的试飞数据,因此也可用于飞行过程中实时识别尾旋运动,辅助驾驶员评估飞行风险,提升飞行安全性。
- 还没有人留言评论。精彩留言会获得点赞!