一种三维点云纹理映射方法、系统、设备及介质与流程
本发明涉及三维数字化测量,具体地说,涉及一种三维点云纹理映射方法、系统、设备及介质。
背景技术:
1、在飞机制造过程中,需要对飞机的气动性能进行测试,检测其涉及是否符合要求。目前,飞机的气动性能主要通过风洞实验结合摄影测量技术、压敏涂漆技术等进行测量。其中,压敏涂漆技术通过在飞机模型表面涂一层压敏漆,并通过涂漆的颜色变化来反映压力变化,即飞机的气动性能。由于风洞特殊的环境限制,使得只能通过单个相机拍摄飞机模型表面的压敏涂漆颜色变化。同时,需要将拍摄的压敏涂漆颜色变化映射至飞机实际的数模中,用于分析飞机不同位置的气动性能。然而,任意角度拍摄的图像高精度映射至对应的数模一直是行业难点。
2、为了解决上述问题,许多方法被提出来实现三维点云数据的贴图。专利申请号为“201510399135.4”,专利名称为“一种动态三维场景的激光雷达成像与着色方法”的中国发明专利,该方法对场景进行三维建模,并对目标场景中的地形进行纹理贴图。专利申请号为“202010500177.3”,专利名称为“一种模型贴图编辑方法及装置”的中国发明专利,该方法在三维空间中获取待贴图的目标模型,并获取待编辑贴图区域的像素点进行相应的编辑实现高效率模型贴图。然而,上述贴图方法主要三维信息与纹理自身特征实现贴图,难以实现高精度贴图方法。
技术实现思路
1、本发明针对上述贴图方法主要三维信息与纹理自身特征实现贴图,难以实现高精度贴图的问题,提出一种三维点云纹理映射方法、系统、设备及介质,该方法首先在结构光坐标系下获取目标物体的二维纹理图像;其次进行配准得到待贴图数模坐标系与结构光坐标系的转换关系;然后建立任意拍摄的二维纹理图像与结构光坐标系下拍摄的二维纹理图像之间的映射变换关系;最后将任意拍摄的二维纹理图像映射至三维数模,将结构光设备作为辅助坐标系统,将待贴图数模与任意角度拍摄的图像统一到相同的视角下,实现高精度高效率且适应狭窄环境下的纹理贴图。
2、本发明具体实现内容如下:
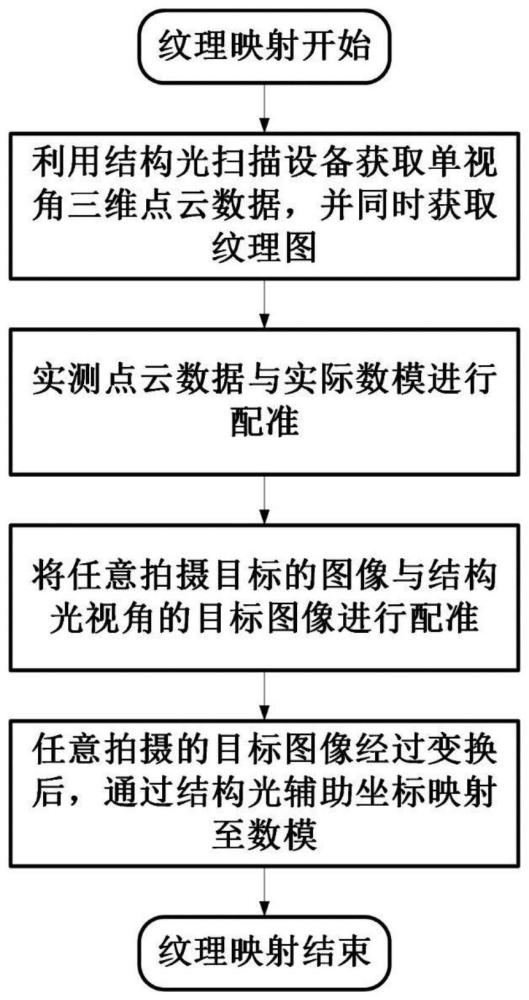
3、一种三维点云纹理映射方法,首先扫描单视角下目标物体的三维点云数据,在结构光坐标系下获取所述目标物体的二维纹理图像;其次将所述三维点云数据与目标物体真实数模进行配准,得到待贴图数模坐标系与结构光坐标系的转换关系;然后任意拍摄目标物体二维纹理图像,并通过特征点提取算法建立任意拍摄的二维纹理图像与结构光坐标系下拍摄的二维纹理图像之间的映射变换关系;最后将任意拍摄的二维纹理图像映射至三维数模。
4、为了更好地实现本发明,进一步地,具体包括以下步骤:
5、步骤s1:扫描单视角下目标物体的三维点云数据,预处理所述三维点云数据,在结构坐标系相同视角下获取所述目标物体的二维纹理图像;
6、步骤s2:根据迭代最邻近点算法将所述目标物体的三维点云数据与所述目标物体的待贴图数模进行配准,得到待贴图数模坐标系与结构光坐标系的转换关系;
7、步骤s3:将任意拍摄的二维纹理图像与结构光设备拍摄的二维纹理图像进行配准,获取任意角度拍摄的二维纹理图像到结构光设备拍摄的二维纹理图像的映射关系;
8、步骤s4:将任意拍摄的二维纹理图像与待贴图数模统一至结构光坐标系,将任意拍摄的二维纹理图像映射至三维数模。
9、为了更好地实现本发明,进一步地,所述步骤s2具体包括以下步骤:
10、步骤s21:将所述三维点云数据与待贴图数模进行下采样操作,并降噪所述三维点云数据;
11、步骤s22:根据迭代最邻近点算法将降噪后的所述三维点云数据与下采样后的所述待贴图数模进行配准;
12、步骤s23:根据所述三维点云数据、所述待贴图数模、获取的点云特征匹配相关性集合和惩罚函数,构建变换矩阵,得到待贴图数模坐标系与结构光坐标系的转换关系。
13、为了更好地实现本发明,进一步地,所述步骤s3具体包括以下步骤:
14、步骤s31:根据所述变换矩阵、旋转参数、获取的点云特征匹配相关性集合,构建刚体变换矩阵;
15、步骤s32:将任意拍摄的的二维纹理图像映射至结构光坐标系,并通过尺度不变特征转换提取特征描述子;
16、步骤s33:根据所述特征描述子,将任意拍摄的的二维纹理图像与结构光设备拍摄的的二维纹理图像进行配准,根据所述刚体变换矩阵,得到任意拍摄的的二维纹理图像到结构光设备拍摄的的二维纹理图像的映射关系。
17、为了更好地实现本发明,进一步地,所述步骤s4具体包括以下步骤:
18、步骤s41:根据高斯核函数模糊任意拍摄的二维纹理图像和结构光坐标系下拍摄的二维纹理图像;
19、步骤s42:根据差分高斯检测模糊后的任意拍摄的二维纹理图像和结构光坐标系下拍摄的二维纹理图像中的特征点;
20、步骤s43:计算所述特征点的描述子,并根据所述描述子计算映射关系变换矩阵;
21、步骤s44:根据所述映射关系变换矩阵,将任意拍摄的二维纹理图像映射至三维数模。
22、为了更好地实现本发明,进一步地,所述描述子包括梯度方向和幅值。
23、为了更好地实现本发明,进一步地,所述步骤s1的具体操作为:扫描单视角下目标物体的三维点云数据,根据背景光强、条纹调制幅值、相位偏移值和光强,采用四步相移解相位所述三维点云数据,在结构光坐标系下获取所述目标物体的二维纹理图像。
24、基于上述提出的三维点云纹理映射方法,为了更好地实现本发明,进一步地,提出一种三维点云纹理映射系统,包括采集单元、转换单元、映射单元、处理单元;
25、所述采集单元,用于扫描单视角下目标物体的三维点云数据,在结构光坐标系下获取所述目标物体的二维纹理图像;
26、所述转换单元,用于将所述三维点云数据与目标物体真实数模进行配准,得到待贴图数模坐标系与结构光坐标系的转换关系;
27、所述映射单元,用于任意拍摄目标物体二维纹理图像,并通过特征点提取算法建立任意拍摄的二维纹理图像与结构光坐标系下拍摄的二维纹理图像之间的映射变换关系;
28、所述处理单元,用于将任意拍摄的二维纹理图像映射至三维数模。
29、基于上述提出的三维点云纹理映射方法,为了更好地实现本发明,进一步地,提出一种电子设备,包括存储器和处理器;所述存储器用于存储计算机程序;当所述计算机程序在所述处理器上运行时,实现上述的三维点云纹理映射方法。
30、基于上述提出的三维点云纹理映射方法,为了更好地实现本发明,进一步地,提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机指令;当所述计算机指令在上述的电子设备上执行时,实现上述的三维点云纹理映射方法。
31、本发明具有以下有益效果:
32、(1)本发明通过将结构光扫描设备作为辅助坐标系统,将待贴图数模与任意角度拍摄的图像统一到相同的视角下,实现了高精度高效率且适应狭窄环境下的纹理贴图。
33、(2)本发明实现了将任意拍摄的二维图像能直接映射到其真实的三维数模,适用于实时、实验环境狭窄情况下的三维点云纹理映射,具有纹理贴图精度高、鲁棒性高等特点,能有效地应用于压敏涂漆的风洞实验。
- 还没有人留言评论。精彩留言会获得点赞!