一种玻璃瓶气密性检测方法与流程
本发明涉及图像处理,具体涉及一种玻璃瓶气密性检测方法。
背景技术:
1、玻璃瓶的生产过程中,气密性是极其重要的一项质量指标。如果玻璃瓶气密性不好,会因为透气大大影响内容物的保质期,影响产品质量。因此需要对玻璃瓶的气密性进行严密的检测。
2、工业生产中通过密封测试仪对玻璃瓶的气密性进行检测,通过判断仪器中是否有连续的气泡产生对玻璃瓶包装的气密性进行检测。
3、在使用密封测试仪进行玻璃瓶气密性检测的过程中通过边缘检测判断图像中是否有气泡的存在,由于场景干扰因素过多,容易将一些不属于气泡区域的图像误以为是气泡,或者由于气泡边缘受到场景中其他部分的干扰被误识别为非气泡,造成对气泡的误判。
4、通过对边缘检测图像中各连通域最接近气泡边缘一系列像素点的目标程度衡量以及对干扰边缘干扰程度的衡量,计算图像中连通域作为气泡的概率,由此判断图像中是否有气泡的存在。
技术实现思路
1、本发明提供一种玻璃瓶气密性检测方法,以解决现有的问题。
2、本发明的一种玻璃瓶气密性检测方法采用如下技术方案:
3、本发明一个实施例提供了一种玻璃瓶气密性检测方法,该方法包括以下步骤:
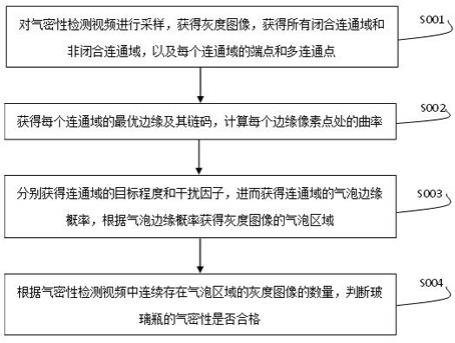
4、对玻璃瓶的气密性检测视频进行等距采样获得灰度图像,获得每个灰度图像的所有连通域和每个连通域的端点和多连通点;
5、根据每个连通域的端点和多连通点,获得每个连通域的最优边缘和干扰边缘以及最优边缘和干扰边缘的链码;根据最优边缘和干扰边缘的链码计算每个边缘像素点处的曲率;
6、根据连通域中所有边缘像素点的曲率的差异获得连通域的目标程度,根据干扰边缘的平均曲率与最优边缘的平均曲率的偏离指标和干扰边缘内边缘像素点的数量获取连通域的干扰因子;
7、根据连通域的目标程度和干扰因子获得连通域的气泡边缘概率,根据气泡边缘概率获得灰度图像的气泡区域;
8、根据气密性检测视频中连续存在气泡区域的灰度图像的数量,判断玻璃瓶的气密性是否合格。
9、进一步地,所述获得每个灰度图像的所有连通域和每个连通域的端点和多连通点,包括的具体步骤如下:
10、对每个灰度图像进行边缘检测获得边缘二值图像,对边缘二值图像进行连通域分析,获得每个灰度图像的若干个连通域;对于每个连通域,如果连通域中的所有边缘像素点形成一个闭合曲线,则将该连通域记为闭合连通域,否则,将该连通域记为非闭合连通域;
11、对于每个边缘像素点,如果该边缘像素点的8邻域内存在一个边缘像素点,则将该边缘像素点记为端点,如果该边缘像素点的8邻域内存在两个以上的边缘像素点,则将该边缘像素点记为多连通点。
12、进一步地,所述获得每个连通域的最优边缘和干扰边缘以及最优边缘和干扰边缘的链码,包括的具体步骤如下:
13、如果连通域是非闭合连通域且不存在多连通点,将连通域的边缘作为连通域的最优边缘;将该连通域的最优边缘上的任意一个端点作为起点,通过弗里曼链码提取该连通域的最优边缘的链码;
14、如果连通域是闭合连通域且不存在多连通点,将连通域的边缘作为连通域的最优边缘;将该连通域的最优边缘上的任意一个边缘像素点作为起点,通过弗里曼链码提取该连通域的最优边缘的链码;
15、如果连通域是非闭合连通域且存在多连通点,根据连通域中的所有多连通点和端点将连通域的边缘划分为多个子边缘,将每个子边缘上所有边缘像素点的斜率的平均值记为每个子边缘的平均曲率,对于每个多连通点对应的多个子边缘,将平均曲率的差值的绝对值最小的两个子边缘连接在一起,对于每个拼接后的子边缘上的每个多连通点,将相邻两个边缘像素点的斜率的差值的绝对值作为多连通点的斜率差,将每个拼接后的子边缘上的所有多连通点的斜率差的平均值记为子边缘的平均斜率差,将平均斜率差最小的子边缘作为连通域的最优边缘,将剩余的子边缘作为连通域的干扰边缘;将该连通域的最优边缘上的任意一个端点作为起点,通过弗里曼链码提取该连通域的最优边缘的链码,将该连通域的干扰边缘上的任意一个端点或多连通点作为起点,通过弗里曼链码提取该连通域的干扰边缘的链码;
16、如果连通域是闭合连通域且存在多连通点,获得多连通点在每个方向的斜率,将斜率最小的方向作为边缘在该多连通点处的连通方向,将边缘沿每个多连通点处的连通方向进行连接,将连接后的边缘作为连通域的最优边缘,将剩余的子边缘作为连通域的干扰边缘;将该连通域的最优边缘上的任意一个边缘像素点作为起点,通过弗里曼链码提取该连通域的最优边缘的链码,将该连通域的干扰边缘上的多连通点作为起点,通过弗里曼链码提取该连通域的干扰边缘的链码。
17、进一步地,所述计算每个边缘像素点处的曲率,包括的具体步骤如下:
18、对于每个连通域的最优边缘上的每个边缘像素点,根据连通域的最优边缘的链码计算连通域的最优边缘上每个边缘像素点处的偏转弧度;根据连通域的最优边缘上每个边缘像素点处的偏转弧度和相邻两个链码值的奇偶性,计算连通域的最优边缘上每个边缘像素点处的曲率;
19、同理,根据连通域的每个干扰边缘的链码计算连通域的每个干扰边缘上每个边缘像素点处的偏转弧度,根据连通域的每个干扰边缘上每个边缘像素点处的偏转弧度和相邻两个链码值的奇偶性,计算连通域的每个干扰边缘上每个边缘像素点处的曲率。
20、进一步地,所述计算连通域的最优边缘上每个边缘像素点处的偏转弧度,包括的具体步骤如下:
21、
22、式中,表示连通域的最优边缘上第i个边缘像素点处的偏转弧度,记为连通域的最优边缘上第i个边缘像素点的弧度差,和分别为连通域的最优边缘的链码上的第i个链码值和第i+1个链码值。
23、进一步地,所述计算连通域的最优边缘上每个边缘像素点处的曲率,包括的具体步骤如下:
24、
25、式中,表示连通域的最优边缘上第i个边缘像素点处的曲率,表示连通域的最优边缘上第i个边缘像素点处的偏转弧度,表示连通域的最优边缘的链码上第i个链码值相邻两个链码值中奇数的数量,表示连通域的最优边缘的链码上第i个链码值相邻两个链码值中偶数的数量。
26、进一步地,所述获得连通域的目标程度,包括的具体步骤如下:
27、将每个连通域的最优边缘上的所有边缘像素点的曲率的标准差记为每个连通域的曲率标准差,将归一化后的曲率标准差作为连通域的曲率标准差;计算连通域的目标程度:
28、
29、式中,t表示连通域的目标程度,s表示连通域的曲率标准差,表示所有连通域的曲率标准差的最小值。
30、进一步地,所述获取连通域的干扰因子,包括的具体步骤如下:
31、
32、式中,i表示连通域的干扰因子,表示连通域的第j个干扰边缘的平均曲率,表示连通域的最优边缘的平均曲率,表示连通域的第j个干扰边缘的边缘像素点的数量,n表示连通域的干扰边缘的数量。
33、进一步地,所述根据连通域的目标程度和干扰因子获得连通域的气泡边缘概率,根据气泡边缘概率获得灰度图像的气泡区域,包括的具体步骤如下:
34、将连通域的目标程度和干扰因子的乘积作为连通域的气泡边缘概率;灰度图像中气泡边缘概率大于预设阈值y的连通域为灰度图像的气泡区域。
35、进一步地,所述判断玻璃瓶的气密性是否合格,包括的具体步骤如下:
36、当气密性检测视频中至少存在连续张存在气泡区域的灰度图像时,t表示预设连续时间,n表示预设间隔,则判断玻璃瓶的气密性不合格;否则,判断玻璃瓶的气密性合格。
37、本发明的技术方案的有益效果是:针对由于场景干扰因素过多,容易将一些不属于气泡区域的图像误以为是气泡,或者由于气泡边缘受到场景中其他部分的干扰被误识别为非气泡,造成对气泡的误判的问题;本发明通过对气密性检测视频进行边缘检测,根据弗里曼链码提取各连通域中最优边缘和干扰边缘,根据最优边缘的目标程度和干扰边缘的干扰因子获取连通域中包含气泡的概率,更加充分地考虑干扰边缘对气泡的影响,从而在图像中更加准确地提取出气泡边缘,排除了场景中非气泡边缘的干扰,使玻璃瓶气密性检测结果更准确。
- 还没有人留言评论。精彩留言会获得点赞!