一种三维模型和无人机视频数据的范围匹配方法与终端与流程
本发明涉及无人机巡查,特别涉及一种三维模型和无人机视频数据的范围匹配方法与终端。
背景技术:
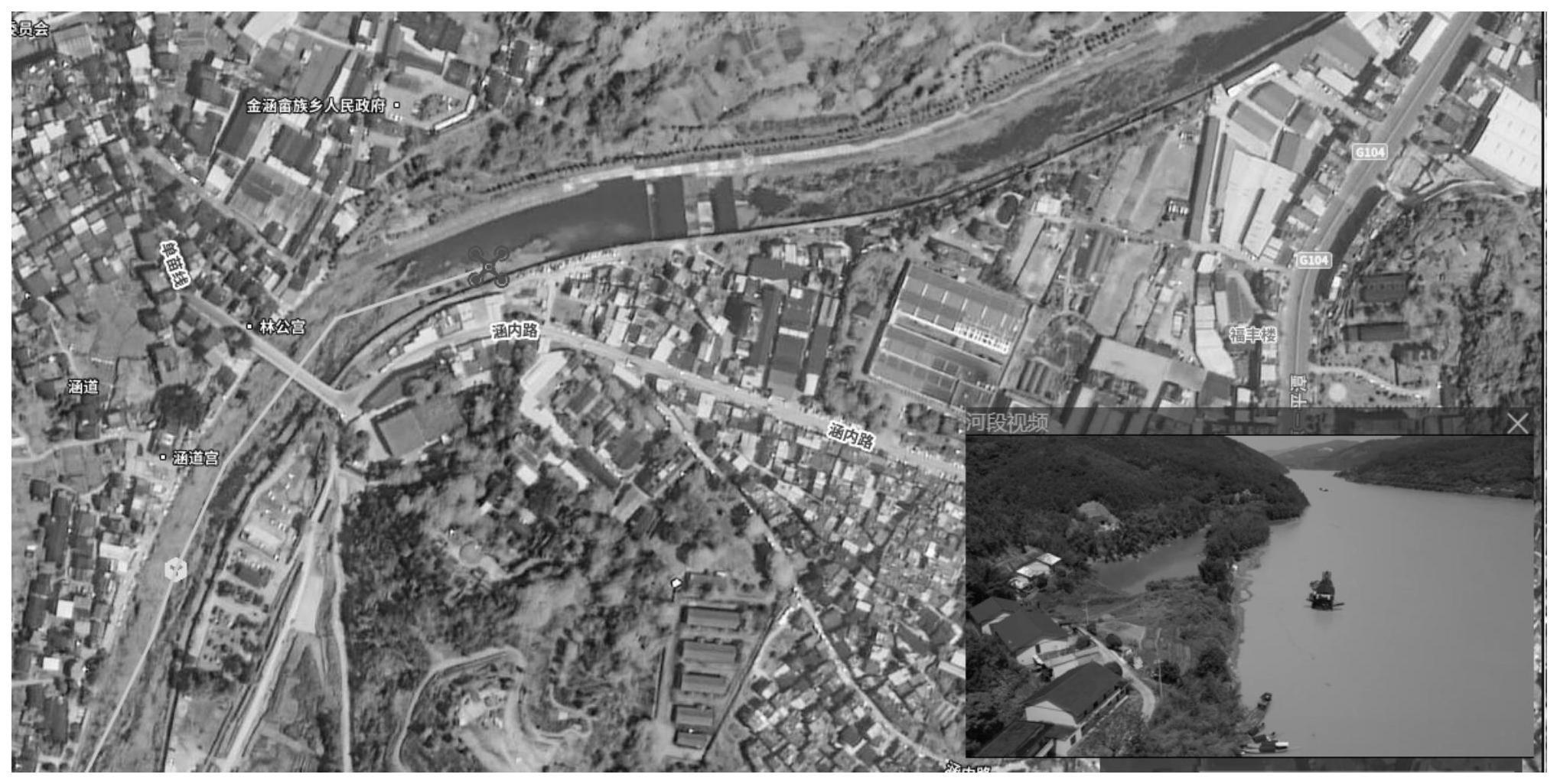
1、目前在河道巡查中普遍采用gis+无人机的展现方式,在gis地图中渲染无人机飞行轨迹,同时在视频窗口中播放无人机视频,使视频和无人机飞行轨迹同步展示,如图1所示。
2、但其存在如下缺点:
3、无法直观地在地图上展现出无人机视频拍摄范围。只能根据无人机的飞行轨迹来大致判断视频覆盖的区域,无法精确地呈现出视频内容在三维场景中的实际范围。无法精准定位视频内容在三维场景中的位置。在无人机拍摄的视频中发现问题时,例如发现河道某个位置存在异常,只能根据视频画面进行预估,无法精确获取问题点的实际地理位置。这可能导致定位不准确,延误处理时间,甚至影响后续的调查和决策。
技术实现思路
1、本发明所要解决的技术问题是:提供一种三维模型和无人机视频数据的范围匹配方法与终端,能够在三维模型中直观地展示无人机视频拍摄范围。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种三维模型和无人机视频数据的范围匹配方法,包括步骤:
4、s1、获取gis三维模型以及无人机航拍的视频数据以及飞行数据;
5、s2、根据所述飞行数据中的飞行速度、飞行高度以及经纬度信息,确定无人机在三维模型中的飞行轨迹;
6、s3、结合飞行数据中的镜头数据,计算视频视角与三维模型之间的匹配关系,根据所述匹配关系在三维模型中创建视频模型进行展示。
7、为了解决上述技术问题,本发明采用的另一种技术方案为:
8、一种三维模型和无人机视频数据的范围匹配终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
9、s1、获取gis三维模型以及无人机航拍的视频数据以及飞行数据;
10、s2、根据所述飞行数据中的飞行速度、飞行高度以及经纬度信息,确定无人机在三维模型中的飞行轨迹;
11、s3、结合飞行数据中的镜头数据,计算视频视角与三维模型之间的匹配关系,根据所述匹配关系在三维模型中创建视频模型进行展示。
12、本发明的有益效果在于:本发明的一种三维模型和无人机视频数据的范围匹配方法与终端,通过无人机的飞行数据确定视频视角将视频数据匹配至三维模型中进行展示,从而可以直观地展示无人机视频拍摄范围,可以精确地定位视频内容在三维场景中的位置,为及时发现和解决问题提供了准确的定位信息。
技术特征:
1.一种三维模型和无人机视频数据的范围匹配方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种三维模型和无人机视频数据的范围匹配方法,其特征在于,所述镜头数据包括镜头旋转角度以及镜头焦距;
3.根据权利要求2所述的一种三维模型和无人机视频数据的范围匹配方法,其特征在于,步骤s31中所述镜头视场角的计算具体为:
4.根据权利要求3所述的一种三维模型和无人机视频数据的范围匹配方法,其特征在于,步骤s32中所述视角范围的计算具体为:
5.根据权利要求4所述的一种三维模型和无人机视频数据的范围匹配方法,其特征在于,步骤s3中所述投影大小的计算具体为:
6.一种三维模型和无人机视频数据的范围匹配终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现以下步骤:
7.根据权利要求6所述的一种三维模型和无人机视频数据的范围匹配终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述镜头数据包括镜头旋转角度以及镜头焦距;
8.根据权利要求7所述的一种三维模型和无人机视频数据的范围匹配终端,其特征在于,步骤s31中所述镜头视场角的计算具体为:
9.根据权利要求8所述的一种三维模型和无人机视频数据的范围匹配终端,其特征在于,步骤s32中所述视角范围的计算具体为:
10.根据权利要求9所述的一种三维模型和无人机视频数据的范围匹配终端,其特征在于,步骤s3中所述投影大小的计算具体为:
技术总结
本发明公开了一种三维模型和无人机视频数据的范围匹配方法与终端,获取GIS三维模型以及无人机航拍的视频数据以及飞行数据;根据所述飞行数据中的飞行速度、飞行高度以及经纬度信息,确定无人机在三维模型中的飞行轨迹;结合飞行数据中的镜头数据,计算视频视角与三维模型之间的匹配关系,根据所述匹配关系在三维模型中创建视频模型进行展示;本发明通过无人机的飞行数据确定视频视角将视频数据匹配至三维模型中进行展示,从而可以直观地展示无人机视频拍摄范围,可以精确地定位视频内容在三维场景中的位置,为及时发现和解决问题提供了准确的定位信息。
技术研发人员:伍满禁,李伟,李颖强,黄少康
受保护的技术使用者:共享数据(福建)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!