一种基于大数据的智能规划方法及系统
本发明涉及户外休闲渔场旅游区路径规划领域,具体涉及一种基于大数据的智能规划方法及系统。
背景技术:
1、随着科技的快速发展,大数据和人工智能技术在各个领域都得到了广泛的应用。其中,休闲渔业户外旅游领域也开始受益于这些先进技术的帮助,尤其是在为游客提供更加智能、便捷和个性化的旅游体验方面。传统的户外有限渔业旅游路径规划主要依赖于人工经验和固定的旅游路线。这种方法在大多数情况下都能满足游客的基本需求,但随着旅游业的发展和游客需求的多样化,这种传统方法逐渐显得不够灵活和准确。例如,当旅游景点出现拥挤或天气突变时,固定的旅游路线可能不再适用,导致游客的旅游体验受到影响。
2、为了解决这些问题,研究者开始探索如何利用大数据和人工智能技术来优化旅游路径规划。通过收集和分析大量的旅游数据,如游客的位置、目的地、时间、旅游景点的人数、天气、气温、紫外线等信息,可以为游客提供更加智能和个性化的旅游建议。
3、此外,无人机技术也为旅游路径规划带来了新的可能性。无人机可以快速、低成本地收集旅游景点的实时数据,如红外图像、温度信息等。这些数据可以帮助研究者更加准确地了解旅游景点的实时情况,从而为游客提供更加准确的旅游建议。但现有的景区由于人流较多,导致红外识别不准确,存在计数重叠的可能性;且如何有效地整合和分析这些大量的数据仍然是一个挑战。传统的数据分析方法往往无法处理如此庞大和复杂的数据,导致旅游建议的准确性和实时性受到限制。因此,需要开发新的数据分析方法和算法,以提高旅游路径规划的效率和准确性。
4、总的来说,休闲户外旅游领域正面临着如何有效地利用大数据和人工智能技术来优化旅游路径规划的挑战。为了满足游客的多样化需求和提高旅游体验,需要开发新的技术和方法,以实现更加智能、便捷和个性化的旅游服务。
技术实现思路
1、针对现有技术中提到的上述问题,为解决上述技术问题,本发明提供了一种基于大数据的智能规划方法及系统,该方法通过采用根据无人机拍摄的当前地点不同高度的n幅红外图像,计算出当前地点的游客人数,然后计算户外休闲渔业游览区各个地点的适应度值t_s,选择户外休闲渔业游览区适应度值t_s最高的地点作为目的地,通过自动计算处理大大实现了实时景区地点的推荐,增强了用户满意度。
2、一种基于大数据的智能规划方法,包括步骤:
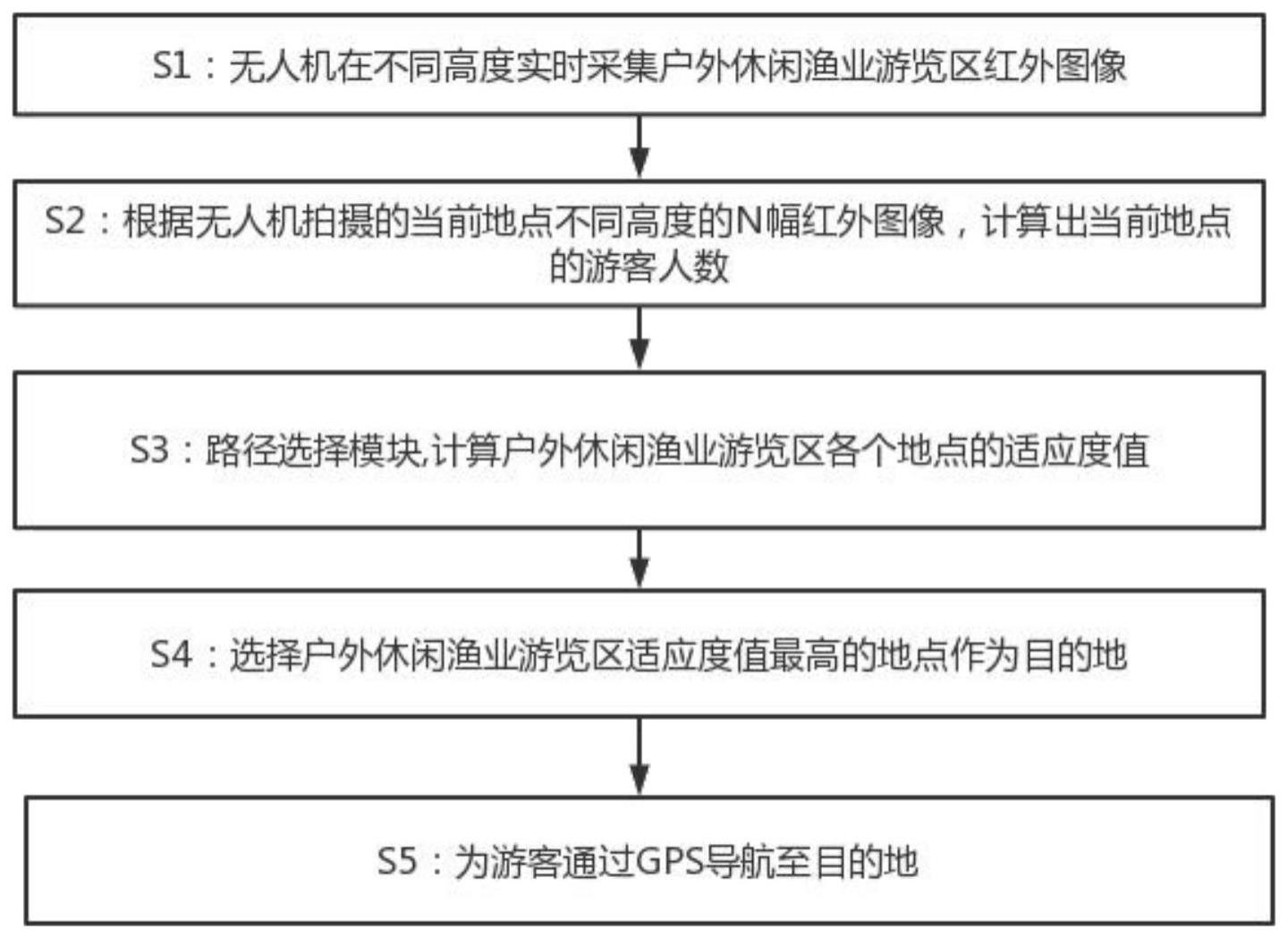
3、s1:无人机在不同高度实时采集户外休闲渔业游览区红外图像;传感器模块获得风速、紫外线、湿度、温度信息数据;
4、s2:根据无人机拍摄的当前地点不同高度的n幅红外图像,计算出当前地点的游客人数;
5、s21:将红外图像转化为二值图像;
6、s22:在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;
7、s23:n幅红外图像中检测出的人数出现频率最高的即为当前拍摄地区的游客人数k;
8、s3:路径选择模块,计算户外休闲渔业游览区各个地点的适应度值t_s,
9、
10、s_t=100-|25-t|
11、s_h=100-|50-h|
12、s_wind=100-|5-wind|
13、s_uv=100-uv
14、其中,w_p、w-t、w_h、w_wind、w_uv分别为人数、温度、湿度、风速、紫外线对应的权重值,p_n为户外休闲渔业游览区该地点的游客最大载荷人数,不同地点对应不同的值;t为获取的温度数据,h为获取的湿度数据,wind为获取的风速数据,uv为紫外线数据;
15、s4:选择户外休闲渔业游览区适应度值t_s最高的地点作为目的地;
16、s5:为游客通过gps导航至目的地。
17、优选地,所述无人机在不同高度实时采集户外休闲渔业游览区红外图像,还包括采用直方图均衡化对图像进行去噪处理。
18、优选地,所述n幅红外图像中检测出的人数出现频率最高的即为当前拍摄地区的游客人数k,对于每个高度的图像,都有一个人数计数,选择出现概率最多的人数作为最终人数,当概率相等时,选择中间高度的图像的人数作为最终人数。
19、优选地,所述在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;
20、初始化,为每个像素分配一个标签,开始时,所有像素的标签都设置为0,表示未标记;
21、第一遍扫描,从图像的左上角开始,逐行逐像素地扫描整个图像;对于每个像素,检查其上方和左方的像素:如果当前像素是背景像素值为0,则跳过;如果上方和左方的像素都是背景像素,为当前像素分配一个新的标签;如果上方或左方的像素之一是前景像素值为1,则为当前像素分配相同的标签;如果上方和左方的像素都是前景像素,但标签不同,则为当前像素分配上方像素的标签,记录上方和左方像素的标签是等价的;
22、标签合并,根据第一遍扫描中记录的等价标签关系,合并具有相同标签的组件;
23、再次扫描整个图像,为每个像素分配最终的标签,通过查找每个像素标签的等价标签来完成;
24、计算图像中的唯一标签数量。
25、本技术还提供一种基于大数据的智能规划系统,包括:
26、无人机、传感器、处理器、存储器,其中无人机包括红外图像相机,用于获取红外图像;
27、数据获取模块,无人机在不同高度实时采集户外休闲渔业游览区红外图像;传感器模块获得风速、紫外线、湿度、温度信息数据;
28、游客人数确定模块,根据无人机拍摄的当前地点不同高度的n幅红外图像,计算出当前地点的游客人数;
29、将红外图像转化为二值图像;
30、在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;
31、n幅红外图像中检测出的人数出现频率最高的即为当前拍摄地区的游客人数k;
32、路径选择模块,计算户外休闲渔业游览区各个地点的适应度值t_s,
33、
34、s_t=100-|25-t|
35、s_h=100-|50-h|
36、s_wind=100-|5-wind|
37、s_uv=100-uv
38、其中,w_p、w_t、w_h、w_wind、w_uv分别为人数、温度、湿度、风速、紫外线对应的权重值,p_n为户外休闲渔业游览区该地点的游客最大载荷人数,不同地点对应不同的值;t为获取的温度数据,h为获取的湿度数据,wind为获取的风速数据,uv为紫外线数据;
39、目的地选择模块,选择户外休闲渔业游览区适应度值t_s最高的地点作为目的地;
40、路径导航模块,为游客通过gps导航至目的地。
41、优选地,所述无人机在不同高度实时采集户外休闲渔业游览区红外图像,还包括采用直方图均衡化对图像进行去噪处理。
42、优选地,所述n幅红外图像中检测出的人数出现频率最高的即为当前拍摄地区的游客人数k,对于每个高度的图像,都有一个人数计数,选择出现概率最多的人数作为最终人数,当概率相等时,选择中间高度的图像的人数作为最终人数。
43、优选地,所述在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;
44、初始化,为每个像素分配一个标签,开始时,所有像素的标签都设置为0,表示未标记;
45、第一遍扫描,从图像的左上角开始,逐行逐像素地扫描整个图像;对于每个像素,检查其上方和左方的像素:如果当前像素是背景像素值为0,则跳过;如果上方和左方的像素都是背景像素,为当前像素分配一个新的标签;如果上方或左方的像素之一是前景像素值为1,则为当前像素分配相同的标签;如果上方和左方的像素都是前景像素,但标签不同,则为当前像素分配上方像素的标签,记录上方和左方像素的标签是等价的;
46、标签合并,根据第一遍扫描中记录的等价标签关系,合并具有相同标签的组件;
47、再次扫描整个图像,为每个像素分配最终的标签,通过查找每个像素标签的等价标签来完成;
48、计算图像中的唯一标签数量。
49、本发明提供了一种基于大数据的智能规划方法及系统,所能实现的有益技术效果如下:
50、1、本技术通过根据无人机拍摄的当前地点不同高度的n幅红外图像,计算出当前地点的游客人数;将红外图像转化为二值图像;在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;n幅红外图像中检测出的人数出现频率最高的即为当前拍摄地区的游客人数k;对于每个高度的图像,都有一个人数计数,选择出现概率最多的人数作为最终人数,当概率相等时,选择中间高度的图像的人数作为最终人数,实现了人数统计的准确度大大提升,处理方法简单快捷、计算量较小,大大提升了处理效率。
51、2、本发明根据路径选择模块,计算户外休闲渔业游览区各个地点的适应度值t_s,
52、
53、s_t=100-|25-t|
54、s_h=100-|50-h|
55、s_wind=100-|5-wind|
56、s_uv=100-uv
57、其中,w_p、w_t、w_h、w_wind、w_uv分别为人数、温度、湿度、风速、紫外线对应的权重值,p_n为户外休闲渔业游览区该地点的游客最大载荷人数,不同地点对应不同的值;t为获取的温度数据,h为获取的湿度数据,wind为获取的风速数据,uv为紫外线数据;目的地选择模块,选择户外休闲渔业游览区适应度值t_s最高的地点作为目的地,通过计算户外休闲渔业游览区各个地点的适应度值t_s,实现了旅游区的自动推荐,大大提高了旅游路径自动推荐规划效率及用户满意度。
58、3、本发明通过所述在二值图像上进行连通组件分析,以检测和计数独立的亮区域,每个亮区域代表一个人;初始化,为每个像素分配一个标签,开始时,所有像素的标签都设置为0,表示未标记;第一遍扫描,从图像的左上角开始,逐行逐像素地扫描整个图像;对于每个像素,检查其上方和左方的像素:如果当前像素是背景像素值为0,则跳过;如果上方和左方的像素都是背景像素,为当前像素分配一个新的标签;如果上方或左方的像素之一是前景像素值为1,则为当前像素分配相同的标签;如果上方和左方的像素都是前景像素,但标签不同,则为当前像素分配上方像素的标签,记录上方和左方像素的标签是等价的;标签合并,根据第一遍扫描中记录的等价标签关系,合并具有相同标签的组件;再次扫描整个图像,为每个像素分配最终的标签,通过查找每个像素标签的等价标签来完成;计算图像中的唯一标签数量,通过扫描标记大大增强了人数的统计效率。
- 还没有人留言评论。精彩留言会获得点赞!