用于提高交互操作准确性的方法和装置与流程
本技术涉及计算机交互技术和混合现实技术,特别涉及用于提高交互操作准确性的方法以及用于实施该方法的控制装置和计算机可读存储介质。
背景技术:
1、虚拟现实(vr)和增强现实(ar)通常可统称为“混合现实”(mixed reality,简称mr)技术。在mr技术中,虚拟信息可与现实世界互动、叠加或融合,为用户提供丰富的交互体验。
2、增强现实(ar)技术将虚拟信息与真实世界巧妙融合,其运用多媒体、三维建模、实时跟踪及注册、智能交互、传感等多种技术手段,将计算机生成的文字、图像、三维模型、音乐、视频等虚拟信息模拟仿真后应用到真实世界中,两种信息互为补充,从而实现对真实世界的“增强”。虚拟现实(vr)技术利用利用现实生活中的数据,通过计算机技术产生的电子信号,将其与各种输出设备结合而模拟现实中的世界。
3、在将ar技术和vr技术应用于汽车场景时将面临诸多挑战。例如,当行驶途中车身发生颠簸时,用户希望在虚拟交互界面内操作的对象与其实际指向的位置可能会发生偏离,从而影响交互操作的准确性。
技术实现思路
1、本技术的一个目的是提供一种用于提高交互操作准确性的方法以及用于实施该方法的控制装置和计算机可读存储介质。
2、按照本技术的一个方面,提供一种用于提高交互操作准确性的方法,包括下列步骤:
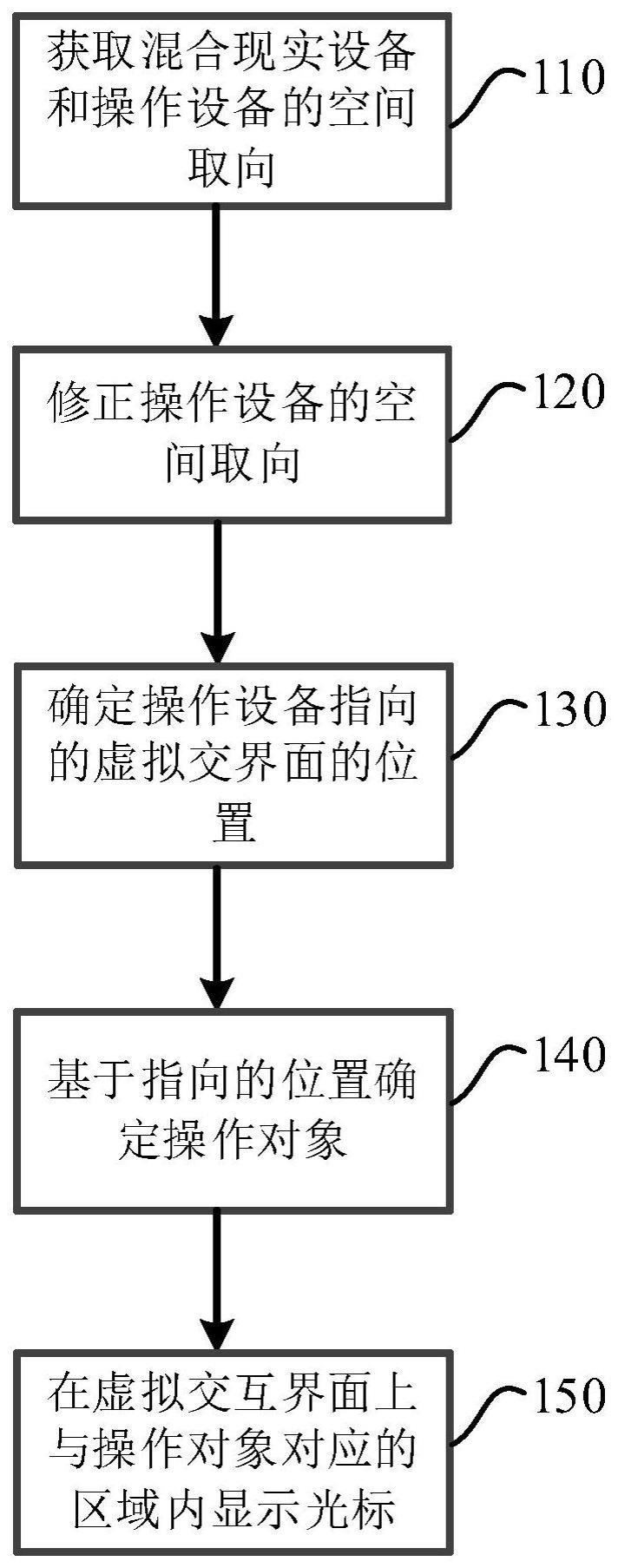
3、获取由用户佩戴的增强现实眼镜或虚拟现实眼镜呈现的虚拟交互界面所属的平面的第一空间取向和用于在所述虚拟交互界面上执行交互操作的操作设备的第二空间取向;
4、基于车辆的运动数据来修正所述第二空间取向;
5、基于所述第一空间取向和修正后的第二空间取向来确定所述操作设备指向的所述虚拟交互界面内的位置;以及
6、基于所述位置确定所述用户在所述虚拟交互界面上的操作对象。
7、可选地,上述方法进一步包括下列步骤:
8、在所述虚拟交互界面上与所述操作对象对应的区域内显示光标。
9、可选地,在上述方法中,将自所述操作设备开始沿修正后的第二空间取向延伸的直线与所述平面的交点确定为所述操作设备指向的所述虚拟交互界面内的位置。
10、可选地,在上述方法中,获取所述第一空间取向和所述第二空间取向的步骤包括:
11、从所述增强现实眼镜或所述虚拟现实眼镜接收第一运动数据并从所述操作设备接收第二运动数据;
12、基于所述第一运动数据确定所述第一空间取向并基于所述第二运动数据确定所述第二空间取向。
13、可选地,在上述方法中,获取所述第一空间取向和所述第二空间取向的步骤包括:
14、从所述增强现实眼镜或所述虚拟现实眼镜接收第一运动数据;
15、基于所述第一运动数据确定所述第一空间取向;
16、从所述操作设备接收基于第二运动数据确定的所述第二空间取向。
17、可选地,在上述方法中,所述操作设备包括下列中的一种:手机、指环和智能手表。
18、可选地,在上述方法中,修正所述第二空间取向的步骤包括:
19、获取所述车辆的运动数据,所述运动数据包括所述车辆的加速度和角速度;
20、基于所述加速度和角速度确定所述车辆的第三空间取向的变化量;以及
21、从所述第二空间取向中扣除所述变化量以得到所述修正后的第二空间取向。
22、可选地,在上述方法中,确定所述操作对象的步骤包括:
23、在所述平面内生成包含交点的区域;
24、将所述虚拟交互界面内与所述区域的重叠面积最大的元素确定为所述操作对象。
25、可选地,在上述方法中,生成所述区域的步骤包括:
26、基于所述车辆的第三空间取向的变化量来确定所述区域的尺寸特征,其中,所述尺寸特征随所述变化量的增加而增加;
27、基于所述交点和所述尺寸特征确定所述区域。
28、可选地,在上述方法中,所述尺寸特征为下列中的一种:半径、矩形的长度和宽度。
29、按照本技术的另一个方面,提供一种用于电动汽车的控制装置,包括:
30、传感器,包括惯性测量单元;
31、主控制单元,包括:
32、微处理器;
33、存储器;以及
34、通信接口,配置为与用户佩戴的增强现实眼镜或虚拟现实眼镜以及操作设备建立通信连接,
35、其中,通过在所述微处理器上运行所述存储器中存储的计算机程序而执行下列操作:
36、获取由所述增强现实眼镜或所述虚拟现实眼镜呈现的虚拟交互界面所属的平面的第一空间取向和用于在所述虚拟交互界面上执行交互操作的所述操作设备的第二空间取向;
37、基于由所述惯性测量单元感测得到的车辆的运动数据来修正所述第二空间取向;
38、可选地,在上述控制装置中,通过在所述微处理器上运行所述存储器中存储的计算机程序而进一步执行下列操作:
39、在所述虚拟交互界面上与所述操作对象对应的区域内显示光标。
40、可选地,在上述控制装置中,将自所述操作设备开始沿修正后的第二空间取向延伸的直线与所述平面的交点确定为所述操作设备指向的所述虚拟交互界面内的位置。
41、可选地,在上述控制装置中,获取所述第一空间取向和所述第二空间取的操作包括:
42、经所述通信接口从所述增强现实眼镜或所述虚拟现实眼镜接收第一运动数据和从所述操作设备接收第二运动数据;
43、基于所述第一运动数据确定所述第一空间取向并基于所述第二运动数据确定所述第二空间取向。
44、可选地,在上述控制装置中,获取所述第一空间取向和所述第二空间取的操作包括:
45、从所述增强现实眼镜或所述虚拟现实眼镜接收第一运动数据;
46、基于所述第一运动数据确定所述第一空间取向;
47、从所述操作设备接收基于第二运动数据确定的所述第二空间取向。
48、可选地,在上述控制装置中,所述操作设备包括下列中的一种:手机、指环和智能手表。
49、可选地,在上述控制装置中,修正所述第二空间取向的操作包括:
50、获取所述车辆的运动数据,所述运动数据包括所述车辆的加速度和角速度;
51、基于所述加速度和角速度确定所述车辆的第三空间取向的变化量;以及
52、从所述第二空间取向中扣除所述变化量以得到所述修正后的第二空间取向。
53、可选地,在上述控制装置中,确定所述操作对象的操作包括:
54、在所述平面内生成包含交点的区域;
55、将所述虚拟交互界面内与所述区域的重叠面积最大的元素确定为所述操作对象。
56、可选地,在上述控制装置中,生成所述区域的操作包括:
57、基于所述车辆的第三空间取向自的变化量来确定所述区域的尺寸特征,其中,所述尺寸特征随所述变化量的增加而增加;
58、基于所述交点和所述尺寸特征确定所述区域。
59、可选地,在上述控制装置中,所述尺寸特征为下列中的一种:半径、矩形的长度和宽度。
60、按照本技术还有一个方面,提供一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,其特征在于,通过由处理器执行所述指令来实现如上所述的方法。
61、在本技术的一些实施例中,通过对操作设备的空间取向作基于车辆运动数据的修正,能够克服对虚拟交互界面内的操作对象进行定位时精度不足的问题。在本技术的另外一些实施例中,区域的尺寸特征基于车辆的空间取向的变化量来确定,这使得能够精细地区分车辆各种幅度的运动或颠簸对用户选择操作对象的干扰程度,从而显著改善确定操作对象的准确性;此外,通过基于区域与元素的交叠面积来确定操作对象,一方面提高了确定操作对象时的“命中率”,另一方面又能够将最有可能是用户希望操作的元素确定为操作对象。
- 还没有人留言评论。精彩留言会获得点赞!