用于存储空间的占用率的确定方法、装置和冰箱与流程
本技术涉及智能家电,例如涉及一种用于存储空间的占用率的确定方法、装置和冰箱。
背景技术:
1、目前,许多用户使用冰箱存储需要低温存放的食材。用户在购买食材的过程中,往往不记得冰箱中还剩多少地方能够放入食材。在用户购买食材的量过大时,冰箱中放置不下新购入的食材,导致食材无法低温存储的问题。
2、为了便于用户了解冰箱中是否有空闲位置存放食材,相关技术中,通过使用深度相机,检测食材与深度相机之间的距离,实现食材体积的估算。
3、在实现本公开实施例的过程中,发现相关技术中至少存在如下问题:
4、深度相机虽然能够检测相机与食材之间的距离,但是由于深度相机的造价成本较高,导致使用深度相机检测食材体积的成本较高。
5、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本公开实施例提供了一种用于存储空间的占用率的确定方法、装置和冰箱,通过点云数据确定存储空间内的占用率,提高了确定存数空间占用率的精准性,以便于根据存储空间占用率确定购入物品的量,减少新购入物品无处放置的问题,并且减少冰箱设置深度相机的成本。
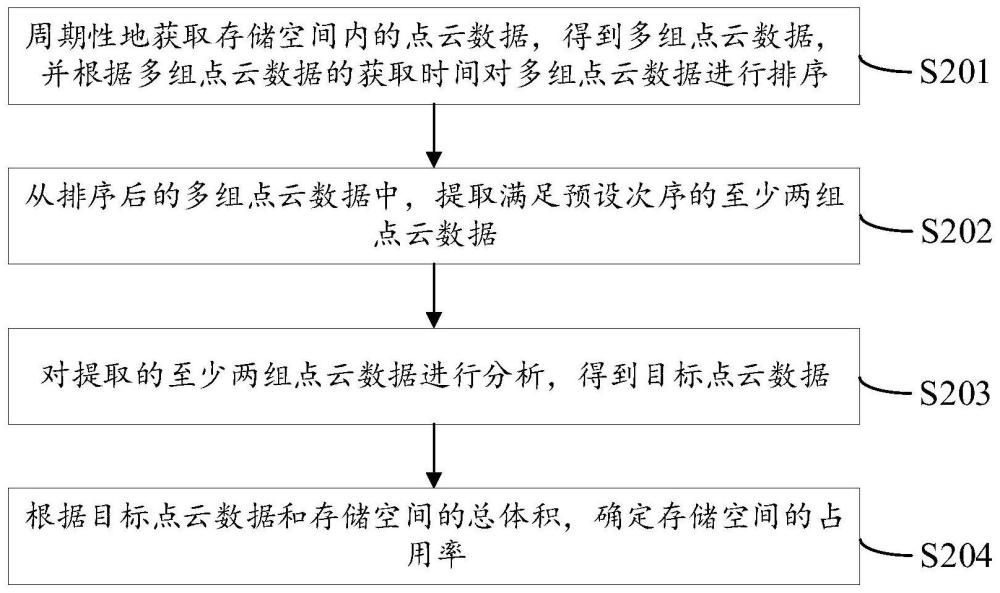
3、在一些实施例中,提供了一种用于存储空间的占用率的确定方法,包括:周期性地获取存储空间内的点云数据,得到多组点云数据,并根据多组点云数据的获取时间对多组点云数据进行排序;从排序后的多组点云数据中,提取满足预设次序的至少两组点云数据;对提取的至少两组点云数据进行分析,得到目标点云数据;根据目标点云数据和存储空间的总体积,确定存储空间的占用率。
4、可选地,对提取的至少两组点云数据进行分析,得到目标点云数据,包括:确定每组点云数据对应的目标点位的位置信息;根据每个目标点位的位置信息,计算位于每个目标点位预设范围内的点云数据的高度平均值;在提取的多组点云数据中,按照获取时间先后顺序,计算相邻两组点云数据中的目标点位之间的高度平均值的差值;在得到的全部差值均小于或等于预设值的情况下,最后一组点云数据作为目标点云数据。
5、可选地,确定每组点云数据对应的一个或多个目标点位的位置信息,包括:根据提取的多组点云数据,确定每组点云数据对应的曲面,得到多个曲面;根据每个曲面,确定每组点云数据对应的目标点位的位置信息;其中,目标点位包括峰点和谷点。
6、可选地,位置信息包括三维坐标信息,三维坐标信息包括二维坐标信息和高度值,根据每个目标点位的位置信息和点云数据,计算位于每个目标点位预设范围内的点云数据的高度平均值,包括:在与存储空间相对应的预置的xyz三维直角坐标系中,确定每个目标点位的位置信息;在预置xyz三维直角坐标系中,将存储空间划分为多个单位块;确定在距离每个目标点位预设范围内的单位块的数量,以及每个单位块底面中心点的三维坐标信息;根据每个单位块底面的中心点的三维坐标信息,确定每个单位块对应的高度值;根据每个单位块对应的高度值和每个目标点位预设范围内的单位块的数量,确定每个目标点位预设范围内的点云数据的高度平均值。
7、可选地,确定在距离每个目标点位预设范围内的单位块的数量,以及每个单位块底面中心点的三维坐标信息,包括:基于xyz直角坐标系,确定每个单位块底面中心点的二维坐标信息;基于每个目标点位的二维坐标信息和每个单位块底面中心点的二维坐标信息,在xy平面上,分别计算每个目标点位至每个单位块底面中心点的距离;将距离小于或等于预设距离的单位块,作为该距离对应的目标点位预设范围内的单位块,分别得到每个目标点位预设范围内的单位块的个数,以及位于目标点位预设范围内多个单位块底面中心点的二维坐标信息;在点云数据中,基于多个单位块底面中心点的二维坐标信息,分别确定多个单位块底面中心点在点云数据中对应的三维坐标信息。
8、可选地,根据每个单位块对应的高度值和每个目标点位预设范围内的单位块的数量,确定每个目标点位预设范围内的点云数据的高度平均值,包括:分别计算每个目标点位预设范围内多个单位块对应的高度值之和;分别计算每个目标点位预设范围内的多个单位块对应的高度值之和与预设范围内的单位块个数的比值,作为每个目标点位预设范围内的高度平均值。
9、可选地,根据目标点云数据和存储空间的总体积,确定存储空间的占用率,包括:根据目标点云数据,确定存储空间的已占用空间的体积;根据已占用空间的体积和存储空间的总体积,确定存储空间的占用率。
10、可选地,根据目标点云数据,确定存储空间的已占用空间的体积,包括:确定目标点云数据中,每个单位块对应的高度值;计算全部高度值的和,作为第一高度和;计算第一高度和与单位块的底面面积的乘积作为存储空间的已占用空间的体积。
11、可选地,根据已占用空间的体积和存储空间的总体积,确定存储空间的占用率之前,还包括:获取存储空间内为空的情况下存储空间中的第一点云数据,以及,存储空间内为满的情况下存储空间中的第二点云数据;计算第一点云数据中,每个单位块对应的高度值之和,作为第一数据;计算第二点云数据中,每个单位块对应的高度值之和,作为第二数据;计算第二数据与第一数据的差值,作为第二高度和;计算第二高度和与单位块底面面积的乘积,作为存储空间的总体积。
12、可选地,根据已占用空间的体积和存储空间的总体积,确定存储空间的占用率,包括:计算已占用空间的体积与存储空间的总体积的比值,作为存储空间的占用率。
13、可选地,周期性地通过雷达获取存储空间内的点云数据之前,按照如下的方法构建预置的xyz三维直角坐标系,方法包括:构建xyz三维直角坐标系;其中,以存储空间的底面所在的平面作为xy平面,以垂直于xy平面的高度方向为z轴;设置xyz直角坐标系中x轴、y轴和z轴的坐标单位相同,按照互相间隔预设长度和预设宽度且垂直于xy平面的多个平面将存储空间的划分为多个相同的单位块;其中,单位块底面的长度和宽度相等,单位块的底面中心点的三维坐标(x,y,z)中的z坐标表示单位块对应的高度值,(x,y)表示单位块的二维坐标信息。
14、可选地,在存储空间位于具有门体的箱体内的情况下,周期性地获取存储空间内的点云数据之前,还包括:响应于门体开启信号,进入周期性地获取存储空间内的点云数据的步骤。
15、可选地,在存储空间位于抽屉内的情况下,周期性地获取存储空间内的点云数据之前,还包括:获取抽屉边沿的位置信息;在位置信息位于预设范围内的情况下,进入周期性地获取存储空间内的点云数据的步骤。
16、可选地,在存储空间位于抽屉内,且抽屉位于具有门体的箱体内的情况下,周期性地获取存储空间内的点云数据之前,还包括:响应于门体开启信号;获取抽屉边沿的位置信息;在位置信息位于预设范围内的情况下,进入周期性地获取存储空间内的点云数据的步骤。
17、可选的,确定存储空间的占用率之后,还包括:根据占用率,确定占用率对应的占比等级;基于占比等级,发出该占比等级对应的提示信息。
18、在一些实施例中,提供了一种用于存储空间的占用率的确定装置,包括处理器和存储有程序指令的存储器,所述处理器被配置为在运行所述程序指令时,执行如上述实施例中任一项所述的用于存储空间的占用率的确定方法。
19、在一些实施例中,提供了一种冰箱,包括:冰箱本体;如上述实施例中所述的用于存储空间的占用率的确定装置,安装于所述冰箱本体。
20、本公开实施例提供的用于存储空间的占用率的确定方法、装置和冰箱,可以实现以下技术效果:
21、本公开实施例提供的用于存储空间的占用率的确定方法,通过周期性地获取存储空间内的点云数据,并根据多组点云数据的获取时间对多组点云数据进行排序,以获得按照时间排序的多组点云数据,以便于能够确定存储空间中,多个时刻下存储空间中的已占用空间的体积。并且,通过对满足预设次序的点云数据进行分析,以确定提取出的点云数据中对应的已占用空间变化情况,减少存储空间中物品的位置移动、存放和移出过程中点云数据的变化造成的干扰,以便于确定存储空间中最终的已占用空间的体积。进而便于确定存储空间的占用率,实现根据存储空间的点云数据确定存储空间的已占用空间,提高检测存储空间中占用率的精准程度,并且降低检测存储空间占用率的成本。以便于根据占用率确定新购入物品的量,减少新购入物品无处放置的问题。
22、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!