一种基于悬链面hough变换的架空线点云检测方法
本发明涉及架空线激光点云的提取与重建方法,特别是一种基于悬链面hough变换的架空线点云检测方法。
背景技术:
1、作为世界上电网规模最大的国家,且伴随着社会的发展和经济的提高,社会用电量不断的提高,对于电网运行的稳定运行提出了更高的挑战。输电线路作为电网系统中的重要组成部分,其安全稳定的运行是国民生活和生产的重要保障,故对其运行状态的监测以及风险的评估一直以来都是电网管理部分工作的重点。传统的巡检方式为人工地面巡检,这种巡检方式能够直观的获取输电线路的实时信息,但其存在巡检成本高、巡检精度低、巡检效率低及对于自然环境复杂的地区巡检不便等缺点。超特高压、大容量、长距离输电线路越建越多,现有的输电线路通道资源日趋减少,输电线路逐渐越来越远离城市以及主要交通干道,线路的走廊的地理环境和气候环境也愈加的复杂,随着高分辨率航拍传感器在航空摄影中的应用不断得到重视,无人机逐渐被用于电力巡检,巡检效率得到极大的提升,但对于复杂场景下无人机采集到的航拍数据处理存在精度不高的问题,如遇大雨、大雾等环境下对绝缘子、电力线、杆塔等设备的识别困难。近年来,机载激光雷达测量技术发展迅速,在电力巡检中也得到了广泛的应用。机载激光雷达通过发射激光脉冲,对线路通道进行扫描,获取激光反射多回波数据的目标表面影像,经过特定的算法,结合gps位置坐标和pos系统激光方向信息以及同时拍摄的高分辨率可见光照片,生成高精度、高密度的三维激光点云数据。巡检人员可以通过构建的电力线模型对线路中存在的安全隐患进行分析,定位电力走廊障碍,避免危害发生。通过对电力线三维模型的建立可以分析电力导线。
2、现有方法中,针对电力线点云的提取方法多为结合电力线空间特性来进行,其大多包括先进行点云数据的预处理步骤:地面点云滤波和地物点云的滤波,地面点云滤波多为采取高程分布特征的方式来实现,其通过给定的高程阈值来进行地面点云及地物点云的分割,这种方法仅仅在一些平原地带具有很好的效果,在丘陵、山地等复杂地形下往往出现地面点云滤除不彻底、地物点云过滤除等问题。地物点云滤波的方法较多,有采取基于点云数据中携带的回波信息的角度、基于密度聚类、基于点云svd分解的特征值等方法,这些方法中存在易造成电力线点云的损失,其他非电力线点云滤波不彻底等问题,比如间割棒点云、绝缘子点云。hough变换多出现在对直线方程的求解过程中,此方法能够有效的避免上述问题,现有研究中仅有结合电力线在地面投影为一条直线的特征和hough变换分离各条架空线点,这种方法仅仅考虑了架空线在xz平面下投影的直线特征,忽略了在xy平面下投影的悬链线特征,在对架空线提取的过程中不可避免的会出现其他噪声点。
3、单档单根导线一般为钢芯铝绞线,其结构复杂,对钢芯铝绞线的机械物理特征进行着重研究,可按照理论力学中的悬链线模型来描述该电力线,而抛物线可以看作是悬链线模型的一种近似表达,由于悬链线方程的复杂程度远远高于其他方程,故研究中多为采取抛物线方程或者多项式方程近似替代悬链线进行电力线三维重建。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于悬链面hough变换的架空线点云检测方法,解决了地面起伏大、线路走向复杂条件下的架空线点云提取,在一定情况下避免了架空线点云中参杂间隔棒点云以及绝缘子点云的情况,为后续针对架空线进行相关科学研究提供了更加准确的数据来源。且采取悬链面结合悬链线剖面的空间悬链线方程进行悬链线点云的获取不再依赖人为对各种参数的制定,减少了提取过程的人工成本,提取过程更加自动化。
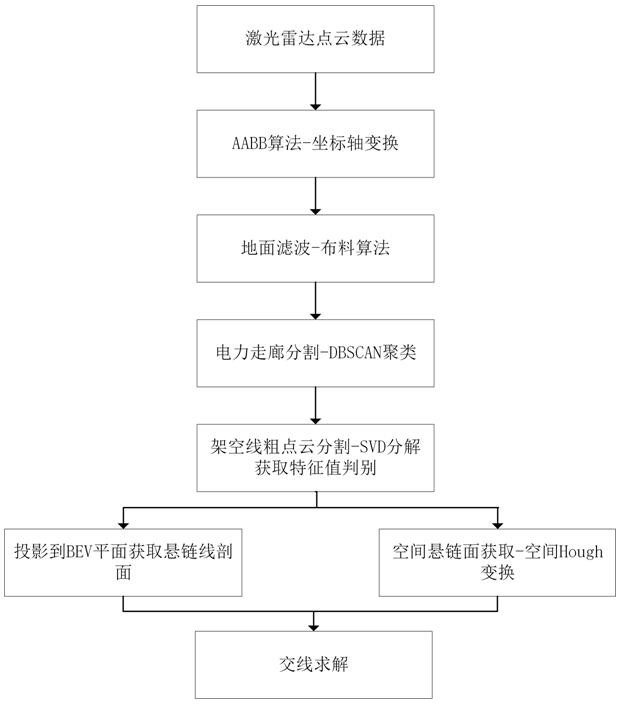
2、为解决上述技术问题,本发明所采用的技术方案是:一种基于悬链面hough变换的架空线点云检测方法,包括以下步骤:
3、步骤一,数据初始化处理,在初始点云数据中采取有向包围盒算法,在不改变点云数据模型的情况下降低点云坐标值的大小;
4、步骤二,地面点的滤除,采取布料滤波算法滤除地面点云;
5、步骤三,电力走廊点的提取,针对电力走廊与电力走廊之间或者电力走廊与其他地物点之间存在的安全距离设定阈值并采取dbscan聚类,以输电线路横跨距离显著大于其他地物点的特征筛选电力走廊点云数据;
6、步骤四,电力线点的粗提取,在3d点云数据中采用基于svd分解协方差矩阵实现pca主成分分析算法,对原始数据进行降维处理,使用线性滤波设定阈值实现对架空线点云的粗提取;
7、步骤五,将粗提取电力线点云投影到bev平面,针对电力线在bev视角呈直线的情况,在投影的2d视图中做hough直线检测,获取导线投影的直线方程;
8、步骤六,根据bev平面中提取出的每根电力线直线方程求解每根3d空间中导线所在的悬链线剖面;
9、步骤七,对架空线粗点云进行极坐标化,根据悬链面参数方程进行空间hough变换并检测存在的悬链面;
10、步骤八,求解各个悬链线剖面与检测出的悬链面的交线,并通过kd-tree进行邻近架空线点云的归类;
11、步骤九,验证所求悬链线方程是否为架空线实际方程。
12、优选的,所述步骤一中包围盒为aabb包围盒,包围盒具有所有棱都与初始坐标轴平行的关系,其定义原则为:
13、xmin≤x≤xmax
14、ymin≤y≤ymax
15、zmin≤z≤zmax
16、其中xmin,ymin,zmin为初始数据中存在的在x,y,z轴上的最小值,xmax,ymax,zmax为初始数据在x,y,z轴上的最大值,变换后的数据点介于上述极值点之间。
17、优选的,步骤二中,采取布料地面滤波方法,模拟布料下坠来实现对非平坦地面点云的滤除。
18、优选的,步骤三中,通过dbscan聚类的方法实现对电力走廊点云的提取,dbscan聚类需要指定2个参数:
19、epsilon(ε):区域的最大半径。如果数据点的相互距离小于或等于指定的epsilon,那么他们将是同一类别。
20、minpts:在一个领域的半径内minpts数的邻域被认为是一个簇。
21、优选的,步骤五中,将点云投影到bev平面后并进行hough变换检测直线,将线条使用参数化表示为:
22、r=xcos(θ)+ysin(θ)
23、其中,r为沿垂直于该线条的向量从原点到线条的距离,θ为x轴与该向量之间的角度,以度为单位,通过hough变换且代入数据点,以返回r和θ的值,并组成参数空间矩阵,选取空间矩阵中存在的出现次数最多的一组r和θ的值来确定直线方程。
24、优选的,步骤六中,直线方程和bev平面方程为:
25、a0x+b0y+c0z+d0=0
26、
27、悬链线剖面方程的计算公式为:
28、
29、
30、
31、k1(x-x0)+k2(y-y0)+k3(z-z0)=0
32、其中,为垂直平面的方程系数向量,为悬链面经过的直线方向向量,代表n向量和s向量向量积的第一个元素,代表n向量和s向量向量积的第二个元素,代表n向量和s向量向量积的第三个元素,(x0,y0,z0)为空间直线过的一个点的坐标。
33、优选的,步骤七中,悬链面的参数方程为:
34、
35、方程是以圆柱坐标系表示的,-∞<u<+∞,0≤v≤2π。
36、优选的,对此悬链面方程进行hough变换,返回悬链面的空间参数矩阵,获取出现次数最多的悬链面参数,并设置阈值采取kd-tree对邻近点云进行归属判别。
37、本发明提供一种基于悬链面hough变换的架空线点云检测方法,具有以下有益效果:
38、1、本发明针对点云数据构造了新的空间坐标系,减少了运算复杂度,增加了计算机运算的速度。
39、2、本发明采取的地面滤波方法对地面起伏不敏感,假设有一块布料受到重力从上方落下,则最终落下的布料就可以代表当前地形,在一定程度上能够适应各种环境下地面的滤波。
40、3、本发明采取空间悬链线结合悬链线剖面来求解架空线空间方程,并通过hough变换对待定参数进行投票反解,设置三个判定条件来判断所求结果的准确性,所求的结果更加接进现实中的架空线方程。
41、4、本发明所提出的针对悬链线空间方程来提取架空线点云在不需要已知其他多余参数的条件下,仅依靠数据中点云的坐标实现架空线点云的自动化提取。
- 还没有人留言评论。精彩留言会获得点赞!