一种任意姿态下的继电器触点图像特征快速匹配方法
本发明属于工件图像匹配,具体地说是一种任意姿态下的继电器触点图像特征快速匹配方法。
背景技术:
1、继电器电触头是继电器的关键部位之一,其性能的好坏直接影响关系到继电器的产品性能和稳定性,继电器触头两触点间距的装配精度是制造继电器的难度,也是引起继电器故障的主要因素。目前,继电器在生产流水线上是采用基于机器视觉图像处理技术进行检测,在检测过程中,由于继电器在流水线上快速送至指定检测区域时如果不进行姿态矫正,其姿态会出现角度偏移,难以快速识别与精准定位,导致继电器触点匹配精度不高,匹配效率差。为了提高继电器触点匹配精度和效率,因此,发明一种任意姿态下的继电器触点图像特征快速匹配方法,通过对任意姿态下的待测继电器触点图像进行特征点提取与描述、粗匹配,结合gms算法和magsac++算法进行精匹配,得到目标区域,进而提高继电器触点间距测量精度,是十分必要的。
2、模板匹配技术在图像处理技术中是一个很重要的分支,无论是目标检测、图像拼接还是视觉slam都离不开模板匹配,它是许多视觉检测任务中的关键步骤。常见的模板匹配有基于灰度的模板匹配和基于特征的模板匹配。前者主要针对图像的像素灰度信息,通过遍历来达到匹配目的,计算量大、不具备旋转和尺度不变性且易受噪声干扰;后者则主要是针对图像的特征信息进行匹配,计算量小、具备旋转和尺度不变性且鲁棒性强。目前,针对特征匹配的算法主要有基于尺度不变特征的sift算法、基于加速稳健特征的surf算法、akaze算法以及orb算法等。一些学者将这些算法逐渐应用到了工业检测当中,朱志浩等的《基于改进orb-flann算法的工件图像识别方法》针对传统的图像识别算法匹配正确率低,运行时间较长等问题,提出了一种基于改进orb-flann算法的工件图像识别方法,该算法对处理尺度和旋转的图像,具有良好的匹配效果,但是总体上匹配时间过长,不具备实时性。鲁晟燚等的《基于hu-sift特征匹配与遗传算法的零件视觉分拣方法》提出一种基于hu-sift特征匹配与遗传算法的零件视觉分拣方法,该方法对机器零件具有很好的识别效果,提高分拣效率。在工件装配中,为解决工件匹配识别速度慢、实时性差等问题,张明路等的《一种改进surf特征匹配的装配工件快速识别方法》提出了一种改进surf特征匹配的装配工件快速识别方法,该方法是利用k-means聚类方法和机器学习中文本检索方法,来构建基于词袋模型来改进surf算法,在光照、尺度和旋转条件下能够对工件快速识别,但由于基于词袋模型的描述向量还有一定的不足,工件匹配准确率还有待提高。
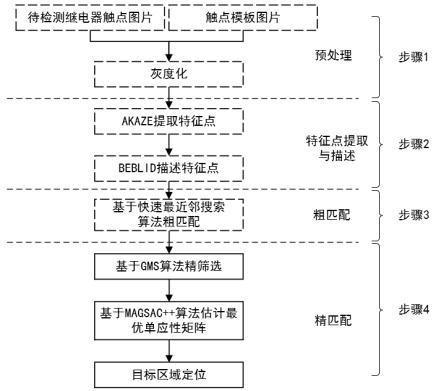
3、因此,为解决继电器送至指定检测区域其姿态会出现角度偏移,会存在难以快速识别与精准定位的问题,本发明利用akaze算法和beblid描述符进行特征点的提取与描述,有效提高了akaze算法的特征点匹配率和匹配效率;使用快速最近邻搜索算法进行特征点的粗匹配;同时使用组合算法进行精匹配,利用gms算法精筛选得到正确匹配点集,用magsac++算法估计最优单应性矩阵,最后通过透视变换,得到继电器触点目标区域,有效解决了当继电器自动生产流水线上继电器姿态发生角度偏移时,继电器触点图像不能快速匹配和精准定位的问题,与对比算法相比,具有匹配速度快、匹配精度高等特点,为下一步触点间距的精确测量提供了保障。
技术实现思路
1、为解决在流水线上当继电器触点姿态发生角度偏移时,继电器触点不能快速识别和精准定位的问题,本发明公开了一种任意姿态下的继电器触点图像特征快速匹配方法。
2、本发明采取如下技术方案:
3、一种任意姿态下的继电器触点图像特征快速匹配方法包含如下步骤。
4、(1)预处理;采用加权平均灰度算法,来得到具有更多关键特征信息的灰度图像,表示为:
5、
6、式中, r、 g和 b分别为彩色图像三通道的像素值。
7、(2)特征点提取与描述;akaze特征点提取主要是通过构建非线性尺度空间来搜索 hessian矩阵局部极大值,将第 s层被检测像素点g的 hessian矩阵值与该层及相邻 s+1层和 s-1层3×3邻域内的26个像素点的 hessian矩阵值进行比较,当其值满足极大值要求时,即为极大值点;使用泰勒展开式进行亚像素级的精确定位,得到极大值点的坐标,即特征点的坐标,并对特征点的主方向进行确认;然后利用beblid描述符来进行特征点的描述,其特征提取函数 f( x)定义为:
8、
9、式中, r( p1, s)和 r( p2, s)分别表示以像素 p1和 p2为中心,尺寸为 s的正方形框, i( q)表示像素点 q的灰度值, i( r)表示像素点 r的灰度值。
10、然后对 f( x)进行阈值判断,得到第 k个 h k( x)为
11、
12、将 h k( x)为-1输出转化为0,+1 输出转换为 1,二值化输出{0,1},再按公式(4)得到二进制描述符beblid, d(x)=( d1( x), d2( x),…, d i( x),…, d k( x))
13、
14、式中, a= diag( α1,…, α k), α i是 h i( x)的adaboost权重。
15、(3)粗匹配;使用快速最近邻搜索算法进行粗匹配,该方法基于随机k-d树算法或k-means树算法实现的,通过选择合适的索引类型和检索参数来提高匹配的精度。该算法的核心是通过使用欧式距离来寻找与特征点最邻近的点。
16、(4)精筛选;采用网格运动估计gms算法对粗匹配点进行进一步筛选,剔除误匹配点,首先将图像划分为 g= g× g个单元网格,并将每个单元网格划分为 i个相邻区域;采用网格平滑运动方式对粗匹配点进行精筛选,在筛选过程中,从模板图像与待匹配图像区域内相对应的单元网格中,选取相对应的相邻区域进行邻域匹配支持估计量计算,有效避免重复计算,从而提高匹配速度;邻域匹配支持估计量 s ab为:
17、;
18、式中, a i为模板图像区域内单元网格 a中的第 i个区域, b i为待匹配图像区域内单元网格 b中的第 i个区域,为单元网格 a、 b内第 i个区域中匹配点的个数;根据阈值,将 s ab大于的网格区域保留, s ab小于的网格区域剔除,保留下来的网格区域内存在满足匹配条件的正确匹配点,得到筛选过后的匹配点集 p。
19、(5)最优单应性矩阵估计;运用粗筛选获得的匹配点集 p,采用magsac++算法估计最优单应性矩阵,使用渐进式napsac采样器进行随机采样估计初试模型参数,计算出拟合误差,即残差;然后根据模型质量函数对当前模型参数进行评估,帮助算法判断当前估计得到的模型在拟合数据方面的表现,模型质量函数公式如下:
20、
21、其中,令 r= d( θ i, p), ρ( r)为损失函数,公式为:
22、
23、式中, p为筛选过后的匹配点集, l( θ, p)为损失函数,为下位不完全伽玛函数, θ 0= θ为初始模型参数, r为特征点 p到模型的残差, σ max为噪声投影误差最大值, k为特征点数量,常数,,为上不完全伽玛函数, n为欧式空间的维度。
24、在模型质量函数评估过程中,边缘化 σ,降低噪声对拟合结果的影响,通过迭代重加权最小二乘法使得损失函数 ρ( r)最小化,趋近于一个局部最小值,此时,当前模型的质量被认为足够高,就会进一步优化模型参数,第 i+1次迭代的模型参数 θ i+1为:
25、
26、
27、迭代重加权最小二乘法会通过最小化拟合误差来更新模型参数,以使拟合误差最小化,如果当前估计得到的模型比之前模型更好,即拟合误差最小,则更新最优模型参数;输出最优单应性矩阵模型,得到最优单应性矩阵 h。
28、(6)目标区域定位;对模板图像四个顶点坐标进行透视变换,在齐次坐标系中,变换关系为:
29、
30、式中, h表示最优单应性矩阵, u和 v表示透视变换前模板图像顶点的齐次坐标, x,和 y,表示透视变换后的待测继电器触点区域顶点的齐次坐标, w取1;
31、将齐次坐标( x,, y,, w,)变为非齐次坐标( x, y),公式如下
32、
33、将模板图像四个顶点坐标( u1, v1)、( u2, v2)、( u3, v3)、( u4, v4)分别代入公式(10),得到( x,, y,, w,),再通过公式(11),得到透视变换后触点目标区域四个顶点的坐标( x1, y1)、( x2, y2)、( x3, y3)、( x4, y4),最后将四个顶点连线,所定位的区域为继电器触点目标区域。
34、本发明的有益效果在于:本发明利用二值局部图像描述符beblid来对特征点进行描述,有效提高了akaze算法的特征点匹配率和匹配效率,同时在将gms算法与magsac++算法相结合进行精匹配,利用gms算法精筛选误匹配点,然后利用精筛选后得到的正确匹配点集,采用magsac++算法估计最优单应性矩阵,最后通过透视变换原理,得到继电器触点目标区域,有效解决了当继电器自动生产流水线上继电器姿态发生角度偏移时,继电器触点图像不能快速匹配和精准定位的问题,与对比算法相比,本发明具有匹配速度快、匹配精度高等特点,为下一步触点间距的精确测量提供了保障。
- 还没有人留言评论。精彩留言会获得点赞!