一种基于运动数字化的人员状态判别及施工质量控制方法与流程
【】本发明涉及一种施工质量控制方法,具体涉及一种基于运动数字化的人员状态判别及施工质量控制方法及系统,属于土木工程。
背景技术
0、
背景技术:
1、近年来,随着建筑工程规模的不断扩大和对施工质量的日益重视,人工施工的精确度和质量控制变得尤为关键。传统的施工质量监控方法往往依赖于人工抽样检查,容易受主观因素影响,且效率低下。为了提高施工质量的控制和管理水平,需要一种能够实时判别施工人员状态并进行质量评估的技术。
2、传感器技术的不断发展和数字化时代的到来,为解决施工质量控制难题提供了新的途径。然而,仅仅依靠传感器采集的数据往往难以准确反映施工质量,因为施工过程中存在多变的因素,对于真正影响施工质量的因素难以识别。
3、因此,为解决上述技术问题,确有必要提供一种创新的基于运动数字化的人员状态判别及施工质量控制方法及系统,以克服现有技术中的所述缺陷。
技术实现思路
0、
技术实现要素:
1、本发明的目的在于提供一种基于运动数字化的人员状态判别及施工质量控制方法,其将传感器技术与运动数字化、视频处理技术相结合,可以实现对施工人员状态和施工质量的更准确、全面的判别和监控。
2、为实现上述目的,本发明采取的技术方案为:一种基于运动数字化的人员状态判别及施工质量控制方法,其包括如下工艺步骤:
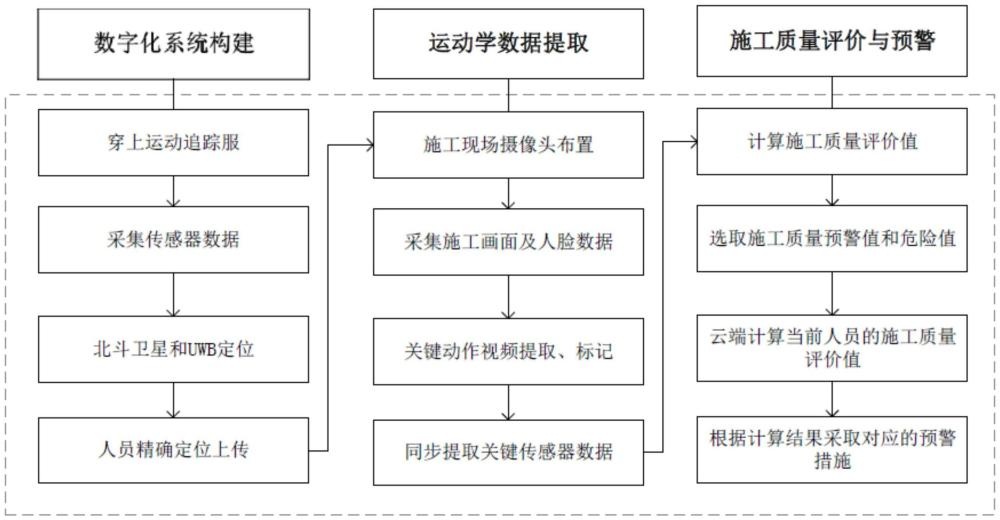
3、1),施工人员运动数字化系统的构建;具体构建过程如下:
4、1.1),施工人员在施工前穿戴运动追踪服;
5、1.2),采集运动运动追踪服中所有惯性传感器的速度、加速度以及所有压力传感器处的压力,采集间隔为1秒,每次采集后对数据打上时间戳,并通过5g dtu通信模块上传至云端服务器;
6、1.3),在施工作业现场布置北斗卫星定位基站,对基站的位置进行定位,定位误差在2m以内;
7、1.4),运动追踪服通过内置的uwb定位模块连接至定位基站,计算运动追踪服相对于定位基站的定位,相对位置的定位误差范围在30cm以内;
8、1.5),通过运动追踪服内的5g dtu通信模块将步骤1.3)和1.4)中的定位数据上传至云端服务器;
9、1.6),云端服务器根据运动追踪服与定位基站的距离数据和定位基站的北斗定位信息,计算运动追踪服的空间绝对位置坐标。
10、2),施工关键动作视频与相应运动学数据的提取;具体提取过程如下:
11、2.1),在施工作业现场布置摄像头组,多角度实时采集施工画面上传至云端;
12、2.2),对所有施工人员进行人脸识别;
13、2.3),将以上两步中的数据一并上传至云端,利用人脸识别技术识别并提取每一名施工人员的施工画面,再将施工人员与施工画面进行绑定;
14、2.4),根据施工画面和运动学数据的时间戳,进行对齐与绑定;
15、2.5),对于某一施工步骤中的关键动作,随机选取所有施工人员施工画面时长的5%进行人工进行识别,标记关键动作的开始与结束时刻;
16、2.6),根据标记时刻对应提取关键动作的运动学数据,选取的关键动作应该直接关联施工的完成质量;
17、3),施工质量评价与预警管理系统的建立;具体建立过程如下:
18、3.1),云端服务器根据关键动作的特点、运动学数据x及其采样频率f,计算施工质量评价值;
19、3.2),云端服务器计算所有施工人员的施工质量评价值均值,取均值的60%为预警值,均值的50%为危险值;
20、3.3),运动追踪服根据云端传回的结果,对施工质量评价值低于预警值的施工人员蜂鸣警告;对施工质量评价值低于危险值的施工人员蜂鸣警告,并发送施工人员的定位,通知管理人员查看是否存在疲劳施工或怠工现象。
21、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述运动追踪服的内层使用双层聚酯纤维材料制成,外层进行pu防水材质覆盖处理;内外两层之间安装有uwb定位模块、5g dtu通信模块、惯性传感器组、压力传感器以及蜂鸣片。
22、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述运动追踪服分为运动追踪上衣和运动追踪裤子;所述蜂鸣片安装在上衣的领口和裤子的腰部;uwb定位模块安装在上衣的左袖口和裤子的左裤腿;5g dtu通信模块安装在上衣右袖口和裤子的右裤腿;惯性传感器组安装在上衣的左右肩线、裤子的左右裤线上,从领口至袖口、裤腰至裤腿,每隔2cm安装一个惯性传感器;压力传感器安装在上衣的左右肩关节、肘关节、腕关节以及裤子的腰部、左右膝盖、脚腕处;所述蜂鸣片、uwb定位模块、惯性传感器和压力传感器均通过电线连接至5g dtu通信模块,且电线固定在两层聚酯纤维层上。
23、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤1.3)中,北斗卫星定位基站包括天线、北斗卫星定位模块以及uwb芯片;将天线安装在基站上,以接收卫星信号;开启北斗卫星定位模块获取卫星信号数据,传输数据进行处理,计算基站位置并校准,进行误差校正,最终定位误差控制在2m以内。
24、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤1.4)具体为:以基站作为锚点,通过uwb定位模块发送信号、接收并记录信号到达时间;测量信号的到达时间差,计算出运动追踪服到各锚点的距离;利用已知的锚点位置和距离数据,采用多边定位算法计算出运动追踪服的位置坐标;以10秒为一个周期,周期性更新定位数据,使运动追踪服的定位误差范围在30cm以内。
25、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤1.6)中,运动追踪服的空间绝对位置坐标计算方法如下:
26、c=cb+crd
27、式中:c表示运动追踪服的坐标,cb表示定位基站的坐标,crd表示运动追踪服与定位基站间的距离。
28、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤2.1)中,摄像头组的布置方法如下:在矩形区域的关键位置,即四个角落和中心位置,共计五个摄像头被布置;摄像头高度维持在2.5米至3米之间,角度设置为约45度;相邻摄像头之间的距离约为7.5m,而中心摄像头与矩形边缘的距离约为5m;摄像头选用1080p至4k的高分辨率摄像头,并搭配4mm至8mm的固定焦距;视野角度的选择应在100至120度之间;所述摄像头上加装防雨罩和遮阳罩;所有摄像头的安装之后,进行测试以验证画面质量。
29、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤2.2)和步骤2.3)中,人脸识别与施工画面提取规则如下:通过视频处理库opencv将视频分解成图像帧;随后,通过应用人脸识别算法,来检测并识别每一帧中的人脸;识别出的人脸与预先建立的人员数据库进行对比以确定身份;一旦识别成功,对相关画面进行裁切和提取,然后将裁切后的画面合并为一个新的视频文件,即为这名施工人员的施工画面。
30、本发明的基于运动数字化的人员状态判别及施工质量控制方法进一步为:所述步骤3.1)中,施工质量评价函数p的计算方法如下:
31、
32、式中:xi表示某运动时刻的运动学数据,fi表示某运动时刻的力学数据,t为施工总时间。
33、本发明的基于运动数字化的人员状态判别及施工质量控制方法还为:所述步骤2.5)中,某一施工步骤具体为钢筋冷弯加工,选取小臂的水平摆动为关键动作;选取小臂的夹角为代表运动学数据,手肘处的压力为代表力学数据,这两个数据分别反映了冷弯施工的弯折角度与弯折强度,直接关联冷弯施工质量。
34、与现有技术相比,本发明具有如下有益效果:
35、1.本发明的基于运动数字化的人员状态判别及施工质量控制方法通过使用运动追踪服和摄像头,实时追踪施工人员的运动状态并采集关键动作数据,通过分析这些数据,可以定量评价施工质量,并进行预警管理,从而全方位地提升施工质量,有效避免施工质量问题的发生。
36、2.本发明的基于运动数字化的人员状态判别及施工质量控制方法可广泛应用于各类建筑工地、工程施工现场等,为提高施工质量管理效率和水平提供了创新解决方案。
- 还没有人留言评论。精彩留言会获得点赞!