一种基于鞍点逼近法的机器人关节模组可靠性分析方法
本发明属于可靠性分析,具体涉及一种基于鞍点逼近法的机器人关节模组可靠性分析方法。
背景技术:
1、现阶段,机械臂逐渐应用于核电站,替代人工完成一系列操作,保护人员远离核辐射环境。关节模组作为机械臂最重要的部件之一,其可靠性是机械臂稳定工作的重要保障。一旦核环境中的关节模组发生故障,不仅会产生高昂的机械臂维护维修成本,也会导致相关核作业停止,甚至增加安全事故发生的风险。因此,为保障核电环境下关节模组正常工作,需严格保障其可靠度要求,对其进行可靠性分析。
2、核工业环境通常比较复杂,除了热、电和振动等常规物理因素外,还伴随强烈的核辐射。在此环境下,机械臂关节模组供电模块、控制系统及传感器等部件的性能参数会发生一定程度变化,导致关节模组最大输出扭矩存在一定分散性,严重影响机械臂的作业精度与稳定性。因此,需对核工业机械臂关节模组开展可靠性分析,考虑关节模组的电源电压和电机电磁转化系数等参数的不确定性传播对关节模组最大输出扭矩的影响,评估机械臂关节模组的可靠性。
技术实现思路
1、针对上述问题,本发明考虑了影响机械臂关节模组最大输出扭矩的不确定因素;在获取不确定性因素对关节模组最大输出扭矩的影响规律之后,根据此规律有针对性地对某些不确定性因素进行控制,为后续优化关节模组设计提供理论指导,以提升机械臂关节模组实际工作中的稳定性和可靠性。
2、本发明公开一种基于鞍点逼近法的机械臂关节模组可靠性分析方法,该方法包括以下步骤:
3、s1:结合实际应用及工程经验,分析获得机械臂关节模组工作过程中影响其性能的不确定性参数及分布,用x=[x1,x2,…,xi,…,xn]表示;
4、s2:通过映射变换将非正态分布的xi转化成标准正态分布ui,如式(1)所示:
5、
6、s3:通过稀疏网格法确定n个数值积分节点[u]=(u(1),u(2),…,u(n))和对应的权重系数w=(w1,w2,…,wn),n的取值取决于维数n和精度系数;
7、s4:通过matlab/simulink建立机械臂关节模组等效模型;
8、s5:通过式(2)将u(j)(j=1)转换为原始分布变量x(j),并将等效模型对应的不确定性参数设置为x(j),计算关节模组最大输出扭矩yi;
9、
10、s6:令j=j+1,重复s4-s5,直至j=n,得到y=[y1,y2,…,yn];
11、s7:通过式(3)计算关节模组最大输出扭矩的累积量生成函数ky(t);
12、
13、s8:通过式(4)和式(5)分别计算最大输出扭矩的累积量生成函数的一阶导数和二阶导数
14、
15、
16、s9:计算机械臂关节模组最大输出扭矩概率密度函数fy和累积分布函数fy,具体过程如下:
17、s91、给定待求解概率密度函数变量y,通过式(6)计算鞍点ts;
18、
19、s92、通过式(3)和式(5)计算和
20、s93、通过(7)式计算fy(y)
21、
22、s94、通过式(8)计算fy(y)
23、
24、s10:重复s9,直至关节模组最大输出扭矩分布范围内的概率密度和累积分布全部计算完成;
25、s11:给定关节模组最大输出扭矩的最小阈值y0,当y<y0时,认为关节模组失效。因此,通过式(9)定义关节模组可靠度r;
26、r=pr{y≥y0} (9)
27、s12:通过式(10)计算关节模组的可靠度。
28、
29、作为本发明进一步的方案:所述s2的式(1)中φ-1()表示标准正态分布的分位数函数;表示变量xi的累积分布函数。通过s2所述变换将所有随机参数从非标准正态分布空间转化到标准正态分布空间,即u=[u1,u2,…,ui,…,un]。
30、作为本发明进一步的方案:所述s94的式(8)中φ()为标准正态分布的概率密度函数;ω(y)和ν的计算方式分别如式(11)和式(12)所示。
31、
32、
33、作为本发明进一步的方案:所述式(11)中sign()表示符号函数。
34、作为本发明进一步的方案:所述s11的式(9)中pr{}表示事件发生概率。
35、本发明的有益效果在于:
36、1.本发明考虑了机械臂关节模组在实际工作过程中存在的不确定性,实现了对机械臂关节模组的可靠性分析,为后续可靠性分析及结构优化设计提供理论参考;
37、2.相较于传统的可靠性分析方法,本发明中提出的方法在保证分析精度的同时,可提高可靠性分析效率;
38、3.与传统基于鞍点逼近的可靠性分析方法相比,本发明直接计算最大扭矩的累积量生成函数,而非先计算最大扭矩的前四阶矩再构造累积量生成函数,因而可获得更高的分析精度。
39、4.本发明提出的机械臂关节模组可靠性分析方法适用于任意结构的可靠性分析,对结构没有特殊要求,适用范围广。
技术特征:
1.一种基于鞍点逼近法的机器人关节模组可靠性分析方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种基于鞍点逼近法的机器人关节模组可靠性分析方法,其特征在于,所述s2的式(1)中φ-1()表示标准正态分布的分位数函数;表示变量xi的累积分布函数;通过s2所述变换将所有随机参数从非标准正态分布空间转化到标准正态分布空间,即u=[u1,u2,…,ui,…,un]。
3.根据权利要求1所述的一种基于鞍点逼近法的机器人关节模组可靠性分析方法,其特征在于,所述s94的式(8)中φ()为标准正态分布的概率密度函数;ω(y)和ν的计算方式分别如式(11)和式(12)所示。
4.根据权利要求3所述的一种基于鞍点逼近法的机器人关节模组可靠性分析方法,其特征在于,所述式(11)中sign()表示符号函数。
5.根据权利要求1所述的一种基于鞍点逼近法的机器人关节模组可靠性分析方法,其特征在于,所述s11的式(9)中pr{}表示事件发生概率。
技术总结
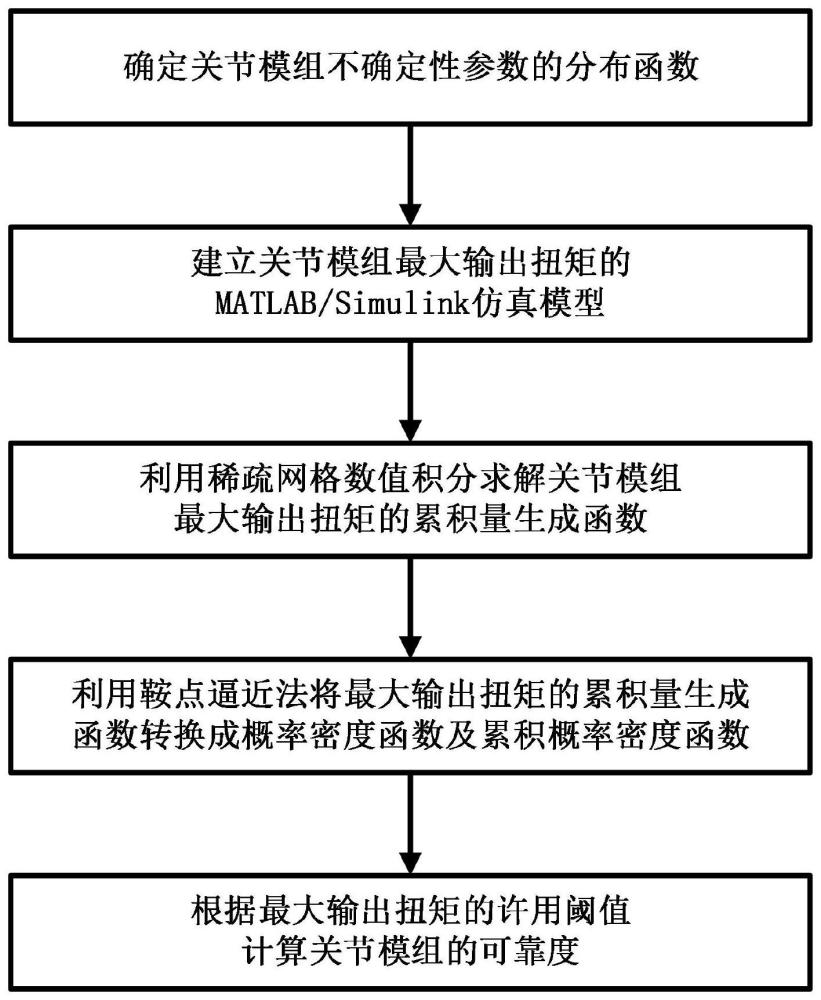
本发明公开了一种基于鞍点逼近法的机器人关节模组可靠性分析方法,属于可靠性分析技术领域;本发明包括分析机器人关节模组实际工作过程中存在的不确定因素;基于MATLAB/Simulink建立关节模组分析模型;通过稀疏网格数值积分计算关节模组最大输出扭矩的矩生成函数及累积量生成函数;使用鞍点逼近法将累积量生成函数转换成概率密度函数和累积概率密度函数;根据给定的最大输出扭矩许用阈值求解关节模组的可靠度。本发明定量评估出机器人关节模组实际工作条件下的不确定性因素对其最大输出扭矩的影响,并基于此进行可靠性分析。为后续关节模组的可靠性优化设计提供理论指导,以提升关节模组可靠性水平。
技术研发人员:姜潮,韦新鹏,李若愚,姚中洋
受保护的技术使用者:湖南大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!