一种智能山地果园运输系统
本发明涉及农业机械运输调度领域,具体为一种智能山地果园运输系统。
背景技术:
1、目前在现有技术中,部分系统针对任务分配调度工作,依赖于特定的目标调度规则来选择执行货品运输任务的车辆。这种方法需要根据每个样本规则对应的订单参数、逻辑关系和参数阈值来生成目标调度规则,从而限制了其适用范围。另一方面,部分系统针对车辆状态监测和定位工作,采用了包括载重传感器、电流传感器、速度传感器、电压传感器、角度传感器、gps定位模块和摄像头在内的多种采集模块,但却缺乏配备相关的避障硬件,这使得它们在运输过程中面临碰撞风险。而且,利用的gps定位模块在山区的树木遮挡环境中不能实现精确定位。
技术实现思路
1、本发明要解决的技术问题是针对以上问题和要求,提供一种智能山地果园运输系统。
2、为解决以上技术问题,本发明采用以下技术方案:
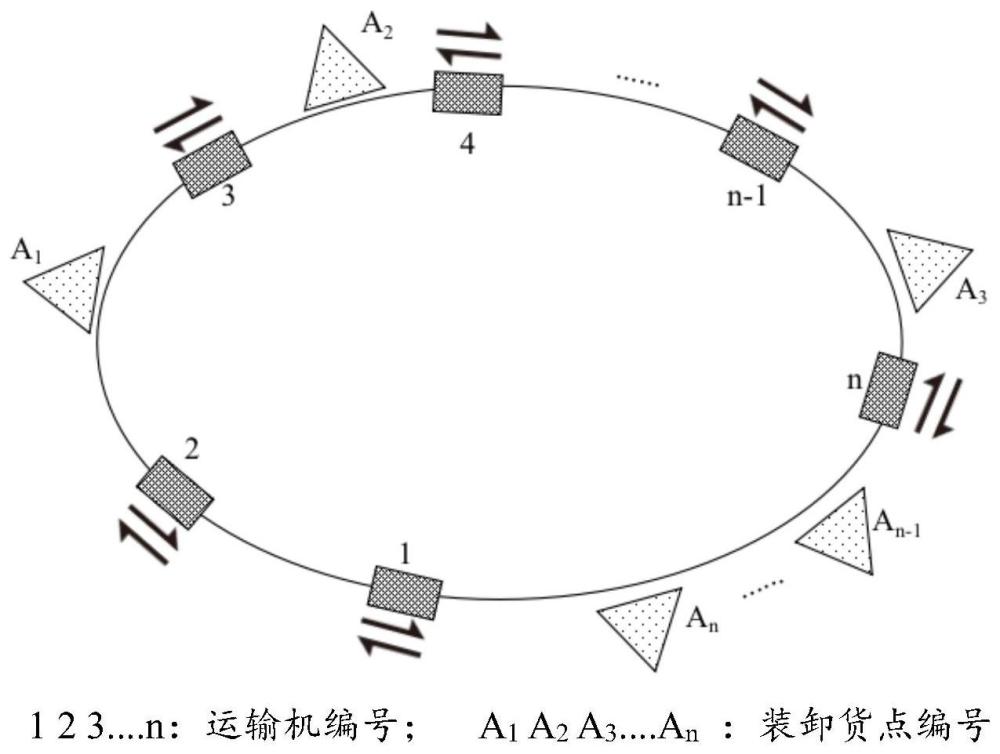
3、一种智能山地果园运输系统,包括调度系统、监控系统和运输机,所述调度系统用于根据环形单轨道上的装卸货点位置、数量和任务要求,利用模拟退火算法确定运输机任务分配可行方案,利用蚁群算法从可行方案中筛选得到最佳任务分配方案,并按照最佳任务分配方案向每台运输机分配任务;
4、所述运输机用于按照分配的任务,在指定装卸货点进行装货和卸货,所述运输机上设置有控制系统、电流传感器、电压传感器、载重传感器、两轴角度传感器、接近开关传感器、rfid阅读器和360°激光雷达,所述电流传感器、电压传感器用于检测运输机电机的实时电流、实时电压,并将数据上传至监控系统;载重传感器用于检测货箱实时载重量,并将数据上传至监控系统;两轴角度传感器用于检测运输机左右摇摆角度和实时上下坡角度情况,并将数据上传至监控系统;接近开关传感器用于检测驱动轮实时转速,并将数据上传至监控系统;rfid阅读器用于阅读轨道上预设的rfid标签保存的在轨位置数据,得到运输机实时位置数据并上传至监控系统;360°激光雷达采集运输机运行环境实时数据,并进行初步处理后上传至服务器。
5、所述监控系统用于融合利用rfid阅读器反馈的实时位置数据和根据接近开关传感器反馈的实时转速计算得到的累计里程对每台运输机进行高精度定位。该系统计算相邻运输机间的相对距离并存储每台运输机实时的速度、电压、电流、载重、两轴角度状态数据。同时,系统利用360°激光雷达收集关于环形单轨道的各种环境信息,包括轨道的使用情况以及可能的动态和静态障碍物。通过分析这些数据,结合每台运输机的实时位置,系统根据避障策略计算得到运输机避障决策,并按照此决策对运输机进行实时控制。
6、进一步地,所述接近开关传感器负责检测固定时间段内运输机驱动轮的滚子通过的次数,并将该数据发送到监控系统。监控系统则根据接收到的数据和已知的驱动轮单圈包含的滚子数量来计算该时间段内驱动轮的转动圈数,进而确定运输机的驱动轮转速。
7、进一步地,所述模拟退火算法包括以下步骤:
8、步骤1.1、根据已有的环境数据,整合所有运输机的位置、状态及装卸货点的货物装卸量(即任务量)需求进行参数设置,为模拟退火算法设定初始温度t_initial,结束温度t_final和冷却率α;
9、步骤1.2、生成初始运输机任务分配可行方案,随机确定一个起始的运输机任务顺序随后进行模拟退火迭代;
10、步骤1.3、在每次迭代过程中,对当前方案进行微调以生成一个新的方案。这种微调包括更改两个任务的执行顺序和调整单个任务的参数,利用预定的成本函数计算新方案成本并与当前方案比较,根据成本差值和当前温度,选择是否采纳新方案,使用冷却率α更新当前温度;
11、步骤1.4、判断是否达到预设最大迭代次数后,若是则判断迭代结束,得到运输机任务分配可行方案集合,否则转到步骤1.3,继续进行迭代。
12、4、根据权利要求3所述的智能山地果园运输系统,其特征在于,所述步骤1.2具体包括以下步骤:
13、步骤1.21、将任务集合task s按任务点的任务量降序排列,选择单个任务点的任务量不小于运输机负载的任务点编号,并从该任务点的货物量中减去相应的运输机负载量以更新其货物量。重复选择和更新过程,直至每个任务点的任务量均小于单辆运输机的负载;
14、步骤1.22、选择两个任务点的任务量之和恰好等于负载的任务点编号组合,组合内按任务点编号升序排列,更新剩余任务点的任务量;选择三个任务点的任务量之和恰好等于负载的任务点编号组合,组合内按任务点编号升序排列,更新剩余任务点的任务量;
15、步骤1.23、将剩余任务集合task s按任务点的任务量降序排列,按顺序选择任务量之和不小于单辆运输机负载的任务点组合,组合内按任务点编号升序排列,利用模拟退火算法更新剩余任务点的任务量,重复排序、选择和更新,直至总任务量小于单辆运输机的负载,得到的剩余任务点为一个运输机任务分配可行方案。
16、进一步地,所述蚁群算法包括以下步骤:
17、步骤2.1、进行初始位置选择,每只模拟的“蚂蚁”随机选择一个起始装卸货点作为初始位置;
18、步骤2.2、进行信息交流与路径选择,在移动到下一个装卸货点前,蚂蚁通过无线通讯系统收集附近其他运输机的状态和装卸货点的实时任务数据;
19、步骤2.3、基于上一步收集的信息以及信息素浓度,使用概率决策规则确定蚂蚁的下一个目的地和运行方向,在此规则下,蚂蚁会评估每个可选目的地的信息素浓度和当前交通状况,然后按照确定的概率选择一个目的地和运行方向(顺时针或逆时针),随后前往所选的装卸货点;
20、步骤2.4、在每个装卸货点,蚂蚁不仅更新其路径信息,而且还会在该点释放一些信息素,以指示该路径的质量,并将更新的路径信息实时传输给附近的运输机;
21、步骤2.5、所有的蚂蚁完成了一次运输路线模拟后,系统进行信息素的全局更新并判断是否达到预设最大迭代次数;若是,则转到下一步;否则返回步骤2.1,开始下一轮的任务模拟;
22、步骤2.6、根据最后一次的运输路线模拟结果输出最佳运输机任务执行序列。
23、进一步地,所述运输机用于按照分配的任务,在指定装卸货点进行装货和卸货,所述运输机上设置有控制系统、电流传感器、电压传感器、载重传感器、两轴角度传感器、接近开关传感器、rfid阅读器和360°激光雷达,所述电流传感器、电压传感器用于检测运输机电机的实时电流、实时电压,并将数据上传至监控系统;载重传感器用于检测货箱实时载重量,并将数据上传至监控系统;两轴角度传感器用于检测运输机左右摇摆角度和实时上下坡角度情况,并将数据上传至监控系统;接近开关传感器用于检测驱动轮实时转速,并将数据上传至监控系统;rfid阅读器用于阅读轨道上预设的rfid标签保存的在轨位置数据,得到运输机实时位置数据并上传至监控系统;360°激光雷达采集运输机运行环境实时数据,并进行初步处理后上传至服务器。
24、本发明采用以上技术方案后,与现有技术相比,具有以下优点:
25、1.该发明将多台山地运输机的智能化监控、调度、运输任务分配集成为一体,既可以监测控制每台运输机的运行状态,又可以将同一轨道所有运输机进行批量统一调度控制,显著提高了多台运输机在轨操控效率。
26、2.该发明利用运输机智能任务分配与调度算法,适用于多台运输机在单轨道顺、逆时针运行,针对多个装卸货点进行运输工作的应用场景,具有调度分配高效率的特点。
27、3.该发明结合两种方式进行运输机的高精度定位,包含:①运输机驱动轮计数实时记录转速与计算累计里程,确定运输机所处环形轨道的相对位置;②使用rfid阅读器读取轨道上预设的rfid标签,确定运输机所处环形轨道的绝对位置。这两种方法的结合,实现了低成本且高精度的运输机定位。
28、4.本发明利用两种方式结合避障策略,旨在实现对运输机的高精度、高效率的障碍物检测和避障,具体如下:
29、实时位置共享策略:①数据获取:每台运输机配备高精度定位系统,实时捕获其在工作环境中的精确位置。②数据同步:位置数据实时传输至中央处理服务器。③碰撞预测:中央服务器通过高速计算模块,实时分析多台运输机之间的相对距离和潜在碰撞路径。④避障决策:一旦预测到潜在的碰撞风险,系统将迅速为相关运输机制定避障策略,并发送控制指令以调整其运行状态。
30、激光雷达感知策略:①数据采集:运输机配备的360°激光雷达对工作环境进行扫描,获取高分辨率的环境信息。②数据处理:首先利用滤波算法初步去除噪声,确保数据的准确性;随后进行轨道特征分析,识别轨道上的障碍物和异常环境;接着进行障碍物聚类操作,基于雷达返回的点云数据,使用聚类算法识别并划分出各个独立的障碍物;进行特征提取,进一步分析障碍物的特性,例如大小、形状和运动方向;最后实施避障决策,根据障碍物的特性和位置,制定出合适的避障策略,如调整速度、改变行驶方向或完全停车等待。
31、结合这两大策略,本发明不仅能够有效识别并规避各类障碍物,还可以确保多台运输机之间的安全距离,从而显著提升运输机的操作安全性和工作效率。
32、下面结合附图和实施例对本发明进行详细说明。
- 还没有人留言评论。精彩留言会获得点赞!