一种动态响应的目标跟踪预测方法、系统、设备和介质
本发明涉及视觉跟踪领域,尤其涉及一种动态响应的目标跟踪预测方法、系统、设备和介质。
背景技术:
1、无人机在世界各大城市的广泛使用,使得无人机跟踪技术在研究和应用中变得非常有价值,视觉跟踪是无人机应用的一个常见领域,现有的视觉跟踪以判别性滤波方法为主,该方法在跟踪过程中,基于判别性相关滤波器的跟踪器记录目标的初始位置,并从目标和背景区域提取梯度直方图和颜色名称特征,该方法在出现目标遮挡、快速运动、尺度变化和视角变化等情况下,目标容易丢失。
2、目前的基于判别性滤波的无人机跟踪方法将过去指定帧的特征、滤波器和,响应图整合到跟踪框架中,这个方法对历史信息的利用是单一且不足的。而在实际应用过程中,目标和跟踪器都会处于快速运动状态,此时,跟踪器获取的每一图像中目标区域内的背景环境会发生显著变化,目标在每一帧图像中也可能经历不可预测的变化,这样就很难确保所选的指定帧图像能够包含准确的目标变化信息,而且现有跟踪器无法有效地适应这些环境的变化,当背景区域出现与目标类似的物体时,跟踪器难以实现准确的识别和分辨,导致正确目标的丢失,从而使跟踪器稳健性降低。
技术实现思路
1、有鉴于此,本发明的目的是提供一种动态响应的目标跟踪预测方法、系统、设备和介质,可以适应背景环境的快速变化,提高目标跟踪的稳健性。
2、为了解决上述问题,第一方面,本发明提供了一种动态响应的目标跟踪预测方法,包括以下步骤:
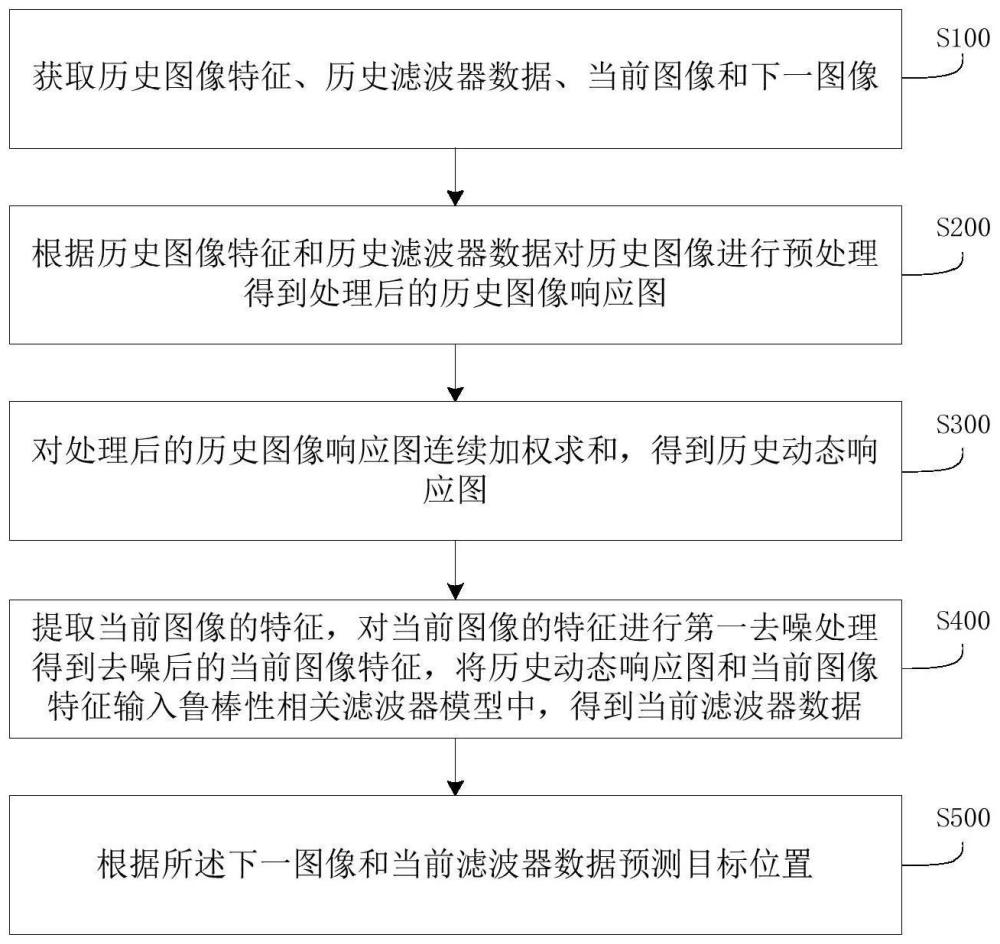
3、获取历史图像特征、历史滤波器数据、当前图像和下一图像;
4、根据所述历史图像特征和所述历史滤波器数据对所述历史图像进行预处理,得到处理后的历史图像响应图;
5、对所述处理后的历史图像响应图进行连续加权求和,得到历史动态响应图;
6、提取所述当前图像的特征,对所述当前图像的特征进行第一去噪处理,得到去噪后的当前图像特征,将所述历史动态响应图和所述当前图像特征输入鲁棒性相关滤波器模型中,得到当前滤波器数据;
7、根据所述下一图像和所述当前滤波器数据预测目标位置。
8、可选地,所述根据所述历史图像特征和所述历史滤波器数据对所述历史图像进行预处理,得到处理后的历史图像响应图,具体包括:
9、将所述历史图像特征和所述历史滤波器数据融合,得到历史图像的响应图;
10、对所述历史图像响应图进行背景高亮处理,得到所述处理后的历史图像响应图。
11、可选地,所述对所述处理后的历史图像响应图进行连续加权求和,得到历史动态响应图,具体包括:
12、根据历史图像距离当前图像的时间计算所述处理后的历史图像的权重;
13、根据所述历史图像的权重对所述处理后的历史图像响应图进行连续加权求和,得到所述历史动态响应图。
14、可选地,所述将所述历史动态响应图和所述当前图像特征输入鲁棒性相关滤波器模型中,得到当前滤波器数据,具体包括:
15、将所述历史动态响应图、所述当前图像的特征和滤波器数据的代数式代入鲁棒性相关滤波器模型的动态响应的滤波器方程中;
16、求解所述滤波器方程,得到所述当前滤波器数据。
17、可选地,所述求解所述滤波器方程,得到所述当前滤波器数据,具体包括:
18、将滤波器拉格朗日乘子引入所述滤波器方程,得到中间等效方程;
19、利用交替方向乘子法将所述中间等效方程分解为若干个子问题,求解所述若干个子问题,得到所述当前滤波器数据。
20、可选地,所述根据所述下一图像和所述当前滤波器数据预测目标位置,具体包括:
21、提取所述下一图像的特征,对所述下一图像的特征进行第二去噪处理,得到去噪后的下一图像特征;
22、对所述下一图像特征和所述当前滤波器数据进行卷积操作,得到下一图像的响应图;
23、以所述响应图中响应值最高的位置作为预测的目标位置。
24、可选地,所述方法还包括:缓存所述去噪后的当前图像特征和当前滤波器数据。
25、为了解决上述问题,第二方面,本发明提供了一种动态响应的目标跟踪预测无人机,所述无人机包括摄像机、飞行器和跟踪器,其中,
26、所述摄像机,用于取得跟踪目标所在区域的图像或视频;
27、所述飞行器,用于带动所述摄像机和所述跟踪器移动;
28、所述跟踪器,用于实现一种动态响应的目标跟踪预测方法任一项所述的方法。
29、为了解决上述问题,第三方面,本发明提供了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现一种动态响应的目标跟踪预测方法任一项所述的方法。
30、为了解决上述问题,第四方面,本发明提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如一种动态响应的目标跟踪预测方法任一项所述的方法。
31、实施本发明包括以下有益效果:本发明通过获取历史图像特征、历史滤波器数据、当前图像和下一图像,根据历史图像特征和历史滤波器数据对历史图像进行预处理,得到处理后的历史图像响应图,对处理后的历史图像响应图进行连续加权求和,得到历史动态响应图,在预测目标时,综合考虑目标在历史图像中的变化和历史图像的背景变化,使得跟踪器适应目标遮挡、快速运动、尺度变化和视角变化等环境快速的变化;通过对提取所述当前图像的特征,对所述当前图像的特征进行第一去噪处理,得到去噪后的当前图像特征,将所述历史动态响应图和所述当前图像特征输入滤波器,得到当前滤波器数据,根据下一图像和当前滤波器数据预测目标位置,可以让去噪后的目标保留更多的位置和尺度信息,提高了跟踪器对目标的整体识别能力,从而提高目标跟踪的稳健性。
技术特征:
1.一种动态响应的目标跟踪预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述根据所述历史图像特征和所述历史滤波器数据对所述历史图像进行预处理,得到处理后的历史图像响应图,具体包括:
3.根据权利要求1所述的方法,其特征在于,所述对所述处理后的历史图像响应图进行连续加权求和,得到历史动态响应图,具体包括:
4.根据权利要求1所述的方法,其特征在于,所述将所述历史动态响应图和所述当前图像特征输入鲁棒性相关滤波器模型中,得到当前滤波器数据,具体包括:
5.根据权利要求4所述的方法,其特征在于,所述求解所述滤波器方程,得到所述当前滤波器数据,具体包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述下一图像和所述当前滤波器数据预测目标位置,具体包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:缓存所述去噪后的当前图像特征和当前滤波器数据。
8.一种动态响应的目标跟踪预测无人机,其特征在于,所述无人机包括摄像机、飞行器和跟踪器,其中,
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1-7任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如权利要求1-7任一项所述的方法。
技术总结
本方案涉及一种动态响应的目标跟踪预测方法、系统、设备和介质,方法包括以下步骤:获取历史图像特征、历史滤波器数据、当前图像和下一图像,根据历史图像特征和历史滤波器数据对历史图像进行预处理,得到处理后的历史图像响应图,对处理后的历史图像响应图进行连续加权求和,得到历史动态响应图,提取当前图像的特征,对当前图像的特征进行第一去噪处理,得到去噪后的当前图像特征,将历史动态响应图和当前图像特征输入鲁棒性相关滤波器模型中,得到当前滤波器数据,根据下一图像和当前滤波器数据预测目标位置。本发明可以适应背景环境的快速变化,提高目标跟踪的稳健性,应用于视觉跟踪领域。
技术研发人员:余玉丰
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!