车位标注方法、模型训练方法、泊车方法及相关装置与流程
本技术涉及自动驾驶,具体涉及一种车位标注方法、模型训练方法、泊车方法及相关装置。
背景技术:
1、在自动驾驶技术领域中,自动泊车是一项重要的汽车驾驶辅助功能,它可以让汽车在停车场或者指定的停车区域里自动寻找车位,并在无需人工干预的情况下完成泊车操作,其工作原理主要是通过汽车上的感知系统来感知周围环境,对车位进行标注,再结合自动驾驶技术,让汽车自主控制转向、变速和制动等操作,最终将车辆安全地停放在指定的停车位上。因而,车位标注数据的精确性和鲁棒性会大大影响到泊车的准确性和安全性。
2、在现有的车位标注方案中,常常使用基于深度学习的方法,通过将鱼眼图像输入到一个神经网络模型中,从而检测出车位的信息,对车位进行识别和标注。然而,由于车位标注模型的检测效果受限于训练数据的数量和场景的丰富度,以及噪声干扰、车位形状畸形、车位被遮挡物遮挡和车位被不同物体占用等因素,获取到的车位标注模型的训练数据的数量和质量难以保障,导致车位标注数据的精确度低、鲁棒性差,从而导致自动泊车的准确性不足,出现安全隐患。
技术实现思路
1、本技术主要提供一种车位标注方法、模型训练方法、泊车方法及相关装置,以解决车位标注模型的训练数据的数量和质量难以保障,车位标注数据的精确度低、鲁棒性差的问题。
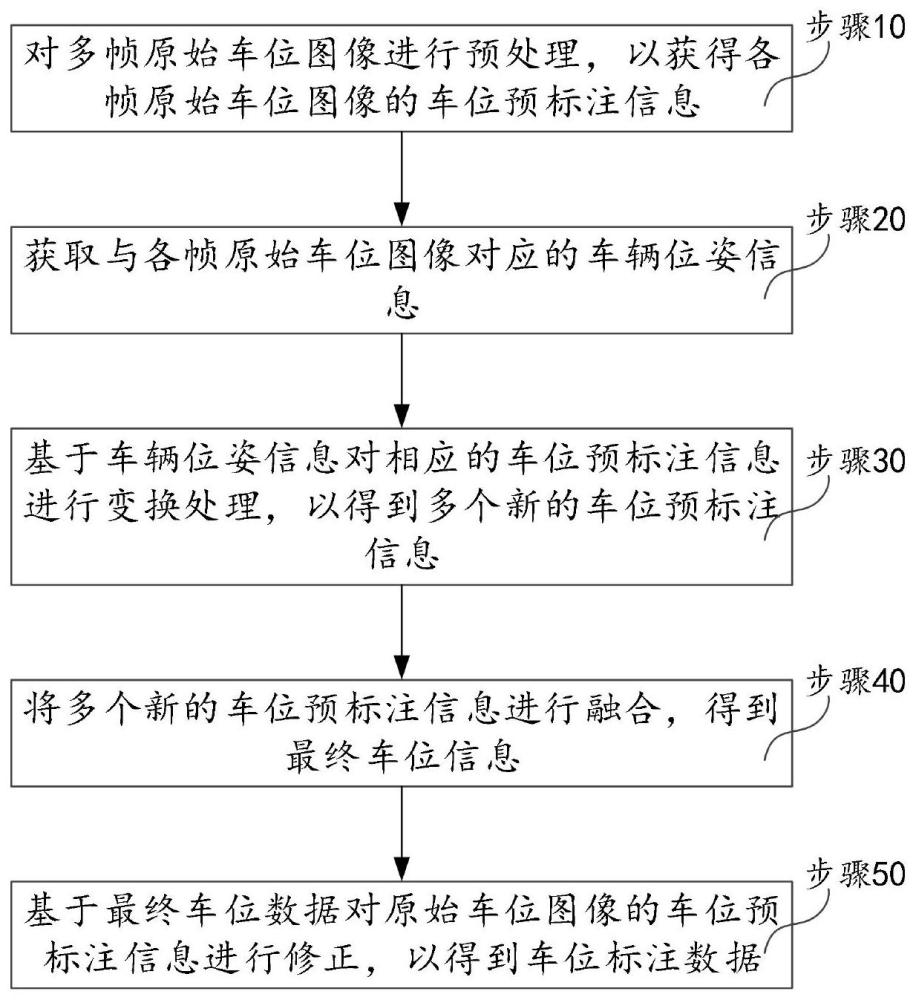
2、为解决上述技术问题,本技术采用的技术方案是:一种车位标注方法。该车位标注方法包括:对多帧原始车位图像进行预处理,以获得各帧所述原始车位图像的车位预标注信息;获取与各帧所述原始车位图像对应的车辆位姿信息,所述车辆位姿信息是基于全局坐标系得到的;基于所述车辆位姿信息对相应的所述车位预标注信息进行变换处理,以得到多个新的车位预标注信息;将多个所述新的车位预标注信息进行融合,得到最终车位信息;基于所述最终车位信息对所述原始车位图像的车位预标注信息进行修正,以得到车位标注数据。
3、该车位标注方法通过单帧预处理、多帧变换处理、多帧融合和数据修正以获取更加准确的车位标注信息,并使用该车位标注信息对原始车位图像的车位预标注信息进行修正,以得到精确度更高、鲁棒性更好的车位标注数据,提高车辆泊车的安全性和准确性,这些数据也保障了训练数据的数量和质量,有利于通过这些数据对车位标注模型进行训练。
4、在一些实施例中,所述车位预标注信息包括第一角点坐标;所述基于所述车辆位姿信息对相应的所述车位预标注信息进行变换处理,包括:基于所述车辆位姿信息对相应的所述第一角点坐标进行坐标系转换,以对齐到所述全局坐标系中,获得第二角点坐标;所述将多个所述新的车位预标注信息进行融合,包括:将多个所述第二角点坐标进行融合,以得到最终角点坐标,所述最终车位信息包括所述最终角点坐标。
5、上述步骤通过坐标系转换和数据融合实现了对不同图像坐标系视角下的车位角点坐标的统一和优化,将数据转换到同一世界坐标系下并进行融合得到每一车位相应的最终角点坐标,提高了角点坐标的精度和稳定性,从而能够帮助车辆更加准确地识别到对应的车位,有利于提高后续自动泊车的准确性。
6、在一些实施例中,所述将多个所述第二角点坐标进行融合,以得到最终角点坐标,包括:基于所述第二角点坐标,计算各帧所述原始车位图像之间车位框的重合度,将各帧所述原始车位图像中重合度大于预设重合度的车位框进行关联;将属于同一所述车位框的多个所述第二角点坐标进行融合,以得到所述最终角点坐标。
7、上述步骤通过计算车位框的重合度并关联重合度大于预设重合度的车位框,能够将不同帧原始车位图像中的同一车位框进行关联和融合,根据车位框的重合度对车位框进行关联,可以用来确定多帧图像中存在的车位情况,并对同一车位的数据进行处理,提高了数据处理的效率和有效性,在对同一车位框的第二角点坐标进行融合后,该最终车位角点坐标也具有较强的可靠性和稳定性,提高了该最终角点坐标的鲁棒性和精确性。
8、在一些实施例中,所述将各帧所述原始车位图像中重合度大于预设重合度的车位框进行关联之后,还包括:基于所述第二角点坐标和移动平均法对多个所述新的车位预标注信息进行降噪,以剔除偏差超过预设阈值的所述新的车位预标注信息。
9、通过对新的车位预标注信息进行降噪处理,可以有效地剔除偏差较大、不准确的车位预标注信息,以得到更加准确可靠的车位标注信息。有利于提高后续车位标注数据的融合处理的效率和融合结果的准确性和鲁棒性。
10、在一些实施例中,所述将多个所述第二角点坐标进行融合,以得到最终角点坐标,包括:采用指数平滑法、加权移动平均法或卡尔曼滤波对多个所述第二角点坐标进行融合,以得到所述最终角点坐标。
11、指数平滑法、加权移动平均法和卡尔曼滤波法都是常见的多数据的融合方法。通过这些数据融合方法,可以消除个别第二角点坐标数据中存在的误差和不确定性,有效地对多个第二角点坐标进行融合,得到更加准确、可靠的最终角点坐标,提高了车位标注的精确性,从而有利于提高后续自动泊车的准确性。
12、在一些实施例中,所述基于所述最终车位信息对所述原始车位图像的车位预标注信息进行修正,以得到车位标注数据,包括:基于所述车辆位姿信息,将所述最终角点坐标反投影到所述第一角点坐标所在的坐标系中,以对所述第一角点坐标进行修正,得到车位角点坐标,所述车位标注数据包括所述车位角点坐标。
13、最终角点坐标是在世界坐标系下的,第一角点坐标则是在图像坐标系下,因此需要基于车辆位姿信息进行坐标转换,从而将最终角点坐标反投影到第一角点坐标所在的坐标系中,通过该步骤可以得到更加准确的车位角点坐标,从而进一步提高了车位标注数据的精确度和鲁棒性,为后续车辆泊车的安全性和准确性提供了有力支持。
14、在一些实施例中,所述车位预标注信息包括车位类型信息;所述基于所述车辆位姿信息对相应的所述车位预标注信息进行变换处理,包括:基于所述车辆位姿信息对所述车位类型信息进行修正,以得到新的车位类型信息;所述将多个所述新的车位预标注信息进行融合,包括:将多个所述新的车位类型信息进行融合,以得到最终车位类型信息,所述最终车位信息包括所述最终车位类型信息。
15、车位类型信息包括多种用于对车位的属性和状态进行判断的数据,但由于噪声干扰、车位形状畸形、车位被遮挡物遮挡和车位被不同物体占用等因素,这些数据也会存在一定的误差,存在一定的缺失,因此还需要对这些数据进行修正,以得到更加精确和有效的数据。而通过将车位类型信息进行融合,可以得到相对确定的车位类型,有利于后续泊车过程中对车位类型的快速判断。同时,由于预处理和变换处理等操作,最终车位信息较为精确,有利于后续提高泊车的准确性。这一较精确的信息也可用于后续对原始车位图像的车位预标注信息进行修正,提高了数据的有效性和稳定性,从而有利于提高车位标注数据的精确性和鲁棒性。
16、在一些实施例中,所述车位类型信息包括第一车位尺寸、第一车位方向和第一车位遮挡信息;所述基于车辆位姿信息对所述车位类型信息进行修正,以得到新的车位类型信息,包括:对所述第一车位尺寸进行补齐,以得到第二车位尺寸;对所述第一车位方向进行修正,以得到第二车位方向;对所述第一车位遮挡信息进行修正,以得到第二车位遮挡信息。
17、这些车位类型信息是车辆泊车所需的关键信息,后续通过精确化这些数据有利于对车位准确标注,实现对车位的可用性和泊车方式的判断,保障了自动泊车的安全性,通过对这些数据进行修正和补齐等操作,有利于提高车位标注数据的准确性和有效性,有利于通过后续步骤获取更加精确和鲁棒的车位标注数据。
18、在一些实施例中,所述将多个所述新的车位类型信息进行融合,以得到最终车位类型信息,包括:采用投票方法对多个所述第二车位尺寸进行融合,以得到最终车位尺寸;采用投票方法对多个所述第二车位方向进行融合,以得到最终车位方向;采用投票方法对多个所述第二车位遮挡信息进行融合,以得到最终车位遮挡信息。
19、投票方法是一种常用的决策方法,用于解决多方案决策问题。通过投票方法获取最终车位尺寸、最终车位方向、最终车辆遮挡信息实现了对多帧车位类型信息数据的融合,得到了更加具体确定的最终车位类型信息,有利于后续通过最终车位类型信息对原始车位图像的车位预标注信息进行修正,以提高车位标注数据的精确性和鲁棒性。
20、在一些实施例中,所述基于所述最终车位信息对所述原始车位图像的车位预标注信息进行修正,以得到车位标注数据,包括:基于所述车辆位姿信息和所述最终车位尺寸对所述第一车位尺寸进行修正,以得到车位标注尺寸;基于所述车辆位姿信息和所述最终车位方向对所述第一车位方向进行修正,以得到车位标注方向;基于所述车辆位姿信息和所述最终车位遮挡信息对所述第一车位遮挡信息进行修正,以得到车位标注遮挡信息。
21、通过该方法提高了原始车位图像中所标注的数据的准确性,使得车位标注数据更加有效、更能反映出车位的情况,提高了车位标注数据的精确性和鲁棒性。同时,在车辆进行泊车时,能够更准确地判断车位尺寸、车位方向和车位遮挡信息,减少了判断失误而出现的安全问题,提高了泊车的准确性和安全性。这些车位标注数据后续也可以用于训练车位标注模型,提高模型对车位类型标注的准确性,此外,这些标注数据还可以用于测试已经训练好的模型,评估模型的性能和准确率。
22、在一些实施例中,所述对多帧原始车位图像进行预处理,以获得各帧所述原始车位图像的车位预标注信息,包括:将多帧所述原始车位图像输入预标注模型,以得到所述车位预标注信息;其中,所述预标注模型是通过车位样本图集对目标检测模型训练得到的。
23、通过将多帧原始车位图像输入预标注模型,得到的车位预标注信息具有一定的精确度,可以实现对车位的初步识别,是本技术中车位标注方法的基础,后续可根据对该多个车位预标注信息进行变换处理、融合和修正以获得更具有效性的高质量的数据,也可使用这些数据对该预标注模型进行训练,从而优化预标注模型的性能,进而通过该预标注模型即可获取更具精确性和鲁棒性的车位标注数据,从而实现数据良性优化的循环,在车辆根据该车位标注数据进行自动泊车时,也有利于提高车辆泊车的安全性和准确性。
24、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种车位标注模型训练方法。该车位标注模型训练方法包括:获取多帧原始车位图像;根据如上述车位标注方法,获取所述原始车位图像的车位标注数据;基于所述原始车位图像和所述车位标注数据对所述车位标注模型进行训练。
25、通过该模型训练方法可以训练出一个能够更加准确地对车位进行标注的车位标注模型,提高了车位标注数据的质量和准确性,从而为后续泊车提供更可靠的参考信息,该模型也提高了车位标注模型的性能和泛化能力,从而为不同场景下的泊车提供更智能的辅助功能。此外,该模型训练方法不需要人工进行标注即可实现自动优化,节省了人力资源和时间成本,提高了模型迭代优化的效率。
26、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种泊车方法。该泊车方法包括:获取实时的多帧原始车位图像;根据上述车位标注方法,或上述车位标注模型训练方法训练得到的车位标注模型,获取所述原始车位图像对应的车位标注数据;从所述车位标注数据中提取目标车位的车位标注数据,并获取所述目标车位的车位标注数据对应的车辆位姿信息;基于所述车辆位姿信息和所述目标车位的车位标注数据,进行自动泊车。
27、该泊车方法在获取实时的原始车位图像后,通过上述的车位标注方法得到该实时的原始车位图像的车位标注数据,或通过将该实时的原始车位图像输入上述的车位标注模型训练方法训练的模型,以得到对应的车位标注数据,从而获取目标车位的位置和类型信息,进而根据车辆的当前位置和姿态规划出合适的泊车轨迹,控制车辆实现自动泊车,提高了泊车的效率、准确性和安全性,减少了人工操作的干扰和误差,同时,由于获取该车位标注数据的方法适应于对多种场景车位的标注,该泊车方法也可以适应不同的场景和环境,适应性和实用性强。
28、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种存储介质,该存储介质上存储有程序数据,其特征在于,所述程序数据被处理器执行时实现如上述车位标注方法的步骤。
29、该存储介质的有益效果可以参考上述车位标注方法、车位标注模型训练方法或泊车方法的介绍,在此不再赘述。
30、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种计算机设备,该计算机设备包括相互连接的处理器和存储器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时,实现如上述车位标注方法的步骤。
31、该计算机设备的有益效果可以参考上述车位标注方法、车位标注模型训练方法或泊车方法的介绍,在此不再赘述。
32、为解决上述技术问题,本技术采用的另一个技术方案是:提供一种车辆,所述车辆包括上述的存储介质或上述的计算机设备。
33、该车辆的有益效果可以参考上述车位标注方法、车位标注模型训练方法或泊车方法的介绍,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!