夜间场景目标检测方法、系统及存储介质与流程
本发明涉及计算机视觉,尤其涉及一种夜间场景目标检测方法、系统及存储介质。
背景技术:
1、随着视频分析以及人工智能技术的发展与进步,越来越多的事件可以通过视频监控实时进行检测与识别。例如,在餐饮单位的后厨监控中,通过视频分析可以对监控场景中的老鼠进行检测,同时可以实现对老鼠的踪迹记录、提前侦测以及报警,能够对进入检测区域的老鼠进行识别,若检测到有老鼠出现,可进行报警,并将报警信号同步推送至管理人员,从而极大地提升了后厨卫生安全水平。但是,相关技术中,在夜间场景下,由于检测算法的精度问题,常常导致画面中的物体被误判为识别目标,进而导致误报。另外,由于深度学习目标检测方法的精度依赖于庞大的数据集支撑,而夜间检测活体目标的数据集往往难以收集,如夜间场景下老鼠活动的数据集,并且需要在相关的监控视频中进行查找,费时费力。因此,以上技术问题亟需解决。
技术实现思路
1、为了解决上述技术问题的至少之一,本发明提出一种夜间场景目标检测方法、系统及存储介质,能够有效提高夜间场景活体目标检测的准确率,提高识别目标的定位准确性。
2、一方面,本发明实施例提供了一种夜间场景目标检测方法,包括以下步骤:
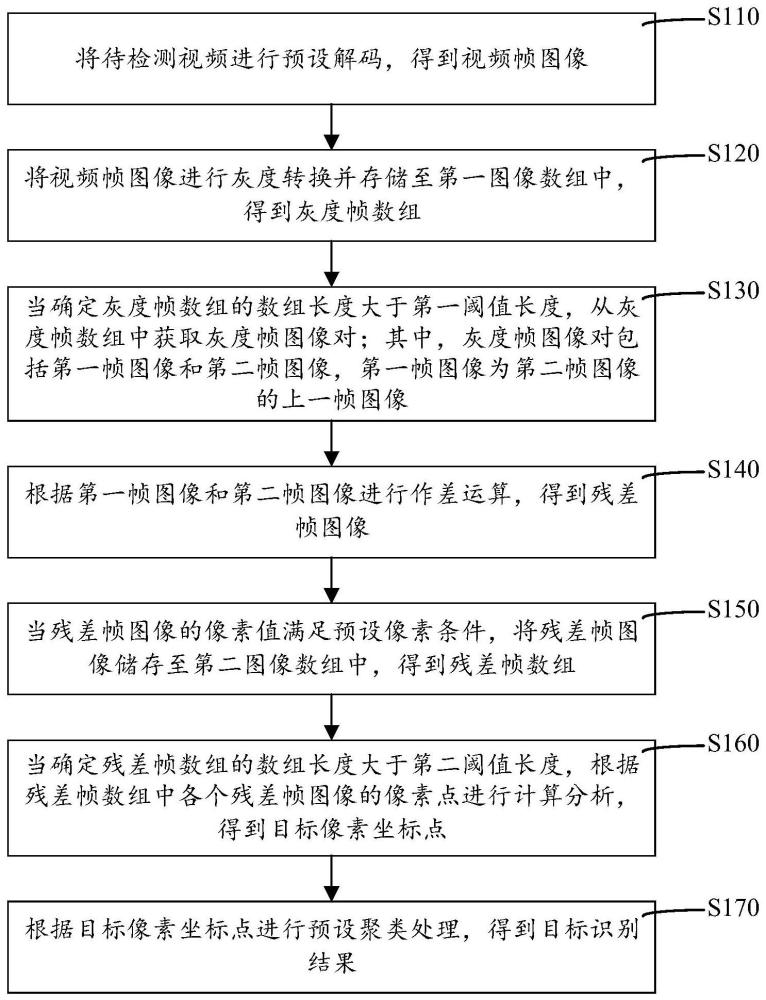
3、将待检测视频进行预设解码,得到视频帧图像;
4、将所述视频帧图像进行灰度转换并存储至第一图像数组中,得到灰度帧数组;
5、当确定所述灰度帧数组的数组长度大于第一阈值长度,从所述灰度帧数组中获取灰度帧图像对;其中,所述灰度帧图像对包括第一帧图像和第二帧图像,所述第一帧图像为所述第二帧图像的上一帧图像;
6、根据所述第一帧图像和所述第二帧图像进行作差运算,得到残差帧图像;
7、当所述残差帧图像的像素值满足预设像素条件,将所述残差帧图像储存至第二图像数组中,得到残差帧数组;
8、当确定所述残差帧数组的数组长度大于第二阈值长度,根据所述残差帧数组中各个残差帧图像的像素点进行计算分析,得到目标像素坐标点;
9、根据所述目标像素坐标点进行预设聚类处理,得到目标识别结果。
10、根据本发明的一些实施例,所述当所述残差帧图像的像素值满足预设像素条件,将所述残差帧图像储存至第二图像数组中,得到残差帧数组,包括:
11、将所述残差帧图像进行二值化处理,得到二值帧图像;
12、对所述二值帧图像进行像素均值计算,得到像素均值数据;
13、当确定所述像素均值数据小于预设像素阈值,将所述残差帧图像存储至所述第二图像数组中,得到所述残差帧数组。
14、根据本发明的一些实施例,所述根据所述残差帧数组中各个残差帧图像的像素点进行计算分析,得到目标像素坐标点,包括:
15、从所述残差帧数组中获取预设数量的所述残差帧图像,得到残差图像组;
16、将所述残差图像组中的各个所述残差帧图像相应的像素点进行与运算,得到像素矩阵;
17、根据所述像素矩阵确定所述目标像素坐标点。
18、根据本发明的一些实施例,所述根据所述像素矩阵确定所述目标像素坐标点,包括:
19、当确定所述像素矩阵的元素值不全为零,获取所述像素矩阵中不为零的元素值相应的像素坐标,得到所述目标像素坐标点。
20、根据本发明的一些实施例,所述根据所述目标像素坐标点进行预设聚类处理,得到目标识别结果,包括:
21、根据所述目标像素坐标点通过预设搜寻算法寻找非零联通区域的轮廓点,得到若干组目标轮廓点;
22、对各组所述目标轮廓点进行坐标均值计算,得到相应的近似中心点;
23、计算所述近似中心点之间的欧氏距离,得到中心距离数据;
24、当确定所述中心距离数据小于预设距离阈值,建立邻接表;
25、根据所述邻接表通过预设优先算法进行分析,得到所述目标识别结果。
26、根据本发明的一些实施例,所述根据所述邻接表通过预设优先算法进行分析,得到所述目标识别结果,包括:
27、通过深度优先算法遍历所述邻接表,对所述近似中心点进行分组,得到中心点分组数据;
28、根据所述中心点分组数据将所述目标轮廓点进行分组并计算相应的角点,得到角点数据;
29、根据所述角点数据求外接矩形,得到所述目标识别结果。
30、根据本发明的一些实施例,所述方法还包括:
31、将所述灰度帧数组中各个灰度图像的预设显示区域的像素值置0;其中,所述预设显示区域包括时间显示区域。
32、另一方面,本发明实施例还提供了一种夜间场景目标检测系统,包括:
33、第一模块,用于将待检测视频进行预设解码,得到视频帧图像;
34、第二模块,用于将所述视频帧图像进行灰度转换并存储至第一图像数组中,得到灰度帧数组;
35、第三模块,用于当确定所述灰度帧数组的数组长度大于第一阈值长度,从所述灰度帧数组中获取灰度帧图像对;其中,所述灰度帧图像对包括第一帧图像和第二帧图像,所述第一帧图像为所述第二帧图像的上一帧图像;
36、第四模块,用于根据所述第一帧图像和所述第二帧图像进行作差运算,得到残差帧图像;
37、第五模块,用于当所述残差帧图像的像素值满足预设像素条件,将所述残差帧图像储存至第二图像数组中,得到残差帧数组;
38、第六模块,用于当确定所述残差帧数组的数组长度大于第二阈值长度,根据所述残差帧数组中各个残差帧图像的像素点进行计算分析,得到目标像素坐标点;
39、第七模块,用于根据所述目标像素坐标点进行预设聚类处理,得到目标识别结果。
40、另一方面,本发明实施例还提供了一种夜间场景目标检测系统,包括:
41、至少一个处理器;
42、至少一个存储器,用于存储至少一个程序;
43、当所述至少一个程序被所述至少一个处理器执行,使得至少一个所述处理器实现如上述实施例所述的夜间场景目标检测方法。
44、另一方面,本发明实施例还提供了一种计算机存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由所述处理器执行时用于实现如上述实施例所述的夜间场景目标检测方法。
45、根据本发明实施例的一种夜间场景目标检测方法、系统及存储介质,至少具有如下有益效果:本发明实施例首先将待检测视频进行预设解码得到视频帧图像,以将视频帧图像进行灰度转换并存储至第一图像数组中,构建得到灰度帧数组。接着,当灰度帧数组的数组长度大于第一阈值长度,即灰度帧数组中存储的灰度帧图像数量达到第一阈值长度相应的数量时,本发明实施例从灰度帧数组中获取灰度帧图像对,以进行作差运算得到残差帧图像。其中,本发明实施例中第一灰度帧图像包括第一帧图像和第二帧图像,且第一帧图像为第二帧图像的上一帧图像。相应地,当残差图像的像素值满足预设像素条件,则本发明实施例将残差帧图像存储至第二图像数组,以缓解图像连续性上存在较大差距导致的噪声问题,构建得到残差帧数组。进一步地,当确定残差帧数组的数组长度大于第二阈值长度,本发明实施例根据残差帧数组中各个残差帧图像的像素点进行计算分析,得到目标像素点坐标,进而根据目标像素点坐标进行预设聚类处理,从而得到目标识别结果,实现较为准确的夜间场景目标检测。容易理解的是,本发明实施例通过根据活体目标在待检测视频中的运动图像,将相应的第一帧图像和第二帧图像作差,通过多个相邻的残差帧信息进行活体目标对象的位置确认,有效地缓解了视频噪声的影响,提高了识别目标的定位准确性,进而有效提高了夜间场景下活体目标检测的准确率。
- 还没有人留言评论。精彩留言会获得点赞!