基于网络架构搜索的轻量级3D-MRI图像超分辨率重建算法
本发明提供基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,涉及图像超分辨率重建。
背景技术:
1、磁共振成像(mri,magnetic resonance imaging)是一种新型的医学断层成像技术,它能够提供高对比度的人体组织影像信息。然而mri设备在扫描电磁波信号时需要采集多个序列的信息,所以信号的整体扫描时间比较长,而扫描对象难以长时间保持静止不动,因此会导致mri图像中存在一定的伪影。针对mri图像成像时间较长导致的成像模糊和伪影问题,可以通过增加磁共振层面选择方向(slice-select direction或through planedirection)的扫描层厚,缩短信号的扫描时间。但同时也降低了正常组织与病变组织的对比度,导致mri图像分辨率较低。因此,如何在减少扫描时间的同时提高mri图像的空间分辨率,为疾病精准诊断提供清晰的影像是一个亟待解决的问题。
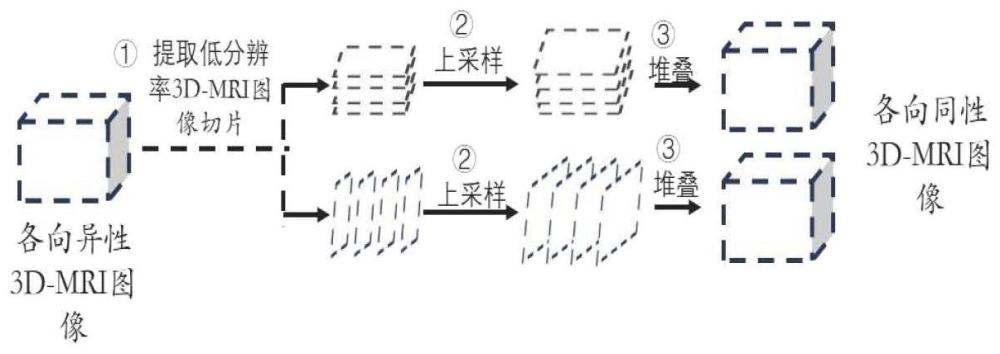
2、目前3d-mri图像的重建过程往往都是从三维的角度去重建,并且取得一定的效果。但是三维重建导致了一个问题在于重建过程需要极大的计算量,因此不利于运用到现实医疗设备当中。现有技术中,可以通过二维图像重建的角度去解决参数较大的问题,具体重建过程如图1所示。但是,传统二维图像的超分辨率重建算法需要设计者对深度学习有着丰富的理论基础和实践经验并且网络结构不一定是最优;与此同时,随着网络深度的加深会使得网络的学习能力加强,带来的问题却是网络参数增加,导致网络训练过程困难。为此,我们提出基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法。
技术实现思路
1、为解决上述问题,本发明提供基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,通过网络架构搜索的方式来设计网络结构,通过网络蒸馏的方式来进一步减少训练参数量,使得我们所提出的基于网络架构搜索的轻量级3d-mri图像的超分辨率重建的方法更容易运用于现实医疗当中。
2、本发明提供基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,包括以下步骤:
3、步骤1:基准模型构建;
4、步骤2:网络架构搜索问题建模;
5、步骤3:模型轻量化;
6、步骤4:模型求解;
7、其中,所述步骤1包括特征提取、非线性映射和重建;
8、其中,所述步骤2包括搜索空间设计、混合卷积模块(m-conv)、通道自适应划分设计、双分支融合卷积注意力机制模块(dcam)的设计;
9、所述混合卷积模块(m-conv)包括混合层的构建:
10、
11、其中,k表示混合层,xk表示特征,o表示操作空间,函数o(·)表示o当中的每一个操作,fk(xk)表示混合层k的输出;
12、优选的,所述通道自适应划分设计具体算法如下:
13、
14、lrd,lrb分别被送入到下一个蒸馏步骤和被保留;
15、优选的,所述步骤4包括目标损失函数:l=αl1+βlhfen;
16、其中
17、α和β分别表示损失函数当中调节l1损失函数和lhfen损失函数的权重。
18、优选的,所述非线性映射由基本模块(cell)组成,基本模块(cell)采用混合残差稠密模块(hrdm-as),所述基本模块(cell)包括m-conv、conv、concat、dcam,所述m-conv表示基于可微分架构搜索的混合卷积模块,所述conv表示3×标准卷积,所述concat表示通道连接操作,所述dcam为双分支融合卷积注意力机制模块。
19、优选的,所述搜索空间设计包括微观搜索空间设计和宏观搜索空间,所述微观搜索空间设计是指神经网络架构的基本组成cell的构成方式,cell主要包括卷积核大小、通道数、卷积层间残差连接、卷积层数量、空洞卷积的空洞系数、梯度优化算法种类。
20、优选的,所述微观搜索空间设计方案如下:
21、①卷积核大小的可能取值:{1,3,5,7};
22、②通道数:{1,32,48,64};
23、③卷积层数量:{2,4,6};
24、④普通卷积(conv);
25、⑤空洞卷积(separable conv);
26、⑥分离卷积(dilated conv);
27、⑦浅层残差卷积块(shallow residual block)
28、⑧卷积层间残差连接:{0,1};
29、⑨block重复数量:{1,2,4,6}。
30、⑩梯度优化算法:{0(adam)、1(rmsprop)、2(sgd)}。
31、本发明的有益效果:
32、本项目提出通过可微分架构搜的方式来对各向异性3d-mri图像进行重建,也是首次使用架构搜的方式来搜索适用3d-mri图像进行重建。
33、首先为了降低搜索的难度和运算量我们将3d-mri图像搜索过程通过降维成二维的角度来进行架构搜索,同时考虑到3d-mri图像存在大量的无信息区域对于搜索过程没有帮助甚至可能会适得其反,所以为了解决以上问题,我们提出了基于3d-mri重建的通道自适应划分策略,通过自适应通道划分过后加快了搜索进度,减少了运算量。
34、为了使得3d-mri图像重建能够被运用到现实当中,我们采用轻量级图像的超分辨率残差特征蒸馏网络来作为我们的基本框架。不同之处在于我们再通道划分过程当中不只是简单的对通道进行划分,而是使用了我们所提出的自适应划分策略,使得划分过后的图像能够更好更快的进行重建,最终使得我们所提出的网络在性能没有降低的情况下相对于其他3d-mri图像重建网络而言参数量大大降低。
技术特征:
1.基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,其特征在于:所述非线性映射由基本模块(cell)组成,基本模块(cell)采用混合残差稠密模块(hrdm-as),所述基本模块(cell)包括m-conv、conv、concat、dcam,所述m-conv表示基于可微分架构搜索的混合卷积模块,所述conv表示3×标准卷积,所述concat表示通道连接操作,所述dcam为双分支融合卷积注意力机制模块。
3.根据权利要求1所述的基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,其特征在于:所述搜索空间设计包括微观搜索空间设计和宏观搜索空间,所述微观搜索空间设计是指神经网络架构的基本组成cell的构成方式,cell主要包括卷积核大小、通道数、卷积层间残差连接、卷积层数量、空洞卷积的空洞系数、梯度优化算法种类。
4.根据权利要求1所述的基于网络架构搜索的轻量级3d-mri图像超分辨率重建算法,其特征在于:所述微观搜索空间设计方案如下:
技术总结
本发明提供基于网络架构搜索的轻量级3D‑MRI图像超分辨率重建算法,涉及图像超分辨率重建技术领域。包括以下步骤:步骤1:基准模型构建,步骤2:网络架构搜索问题建模,步骤3:模型轻量化,步骤4:模型求解。本发明通过网络架构搜索的方式来设计网络结构,通过网络蒸馏的方式来进一步减少训练参数量,使得我们所提出的基于网络架构搜索的轻量级3D‑MRI图像的超分辨率重建的方法更容易运用于现实医疗当中。
技术研发人员:祝华正,唐岭,贾媛媛,蒋艾萍,张俊,杜井龙
受保护的技术使用者:重庆科技学院
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!