一种医学图像关键点检测方法和系统与流程
本发明涉及医学图像处理,特别是涉及一种医学图像关键点检测方法和系统。
背景技术:
1、脊椎是人体肌肉骨骼系统的重要组成部分,其作用不仅是维持和支撑身体结构及器官,也对人体日常和负荷转移发挥着重要作用,而相关脊椎类疾病具有很大的危害。医学影像技术(如ct、mri等)如今是脊柱外科诊疗的主要手段,从医学影像中分割脊椎、测量临床参数是医学影像过程中的重要工作。人工智能技术的自动化技术手术系统能够给出经过处理后的医学影像,建立准确的自动化临床参数测量系统是进行脊椎临床应用以及诊断治疗的关键步骤,例如病症诊断、术前指导及术后评估。医学图像的关键点定位是医学图像分析的重要步骤,如图像分割、特征配准等,然而由于相似的特征结构,使得关键点定位的误差难以实现准确定位。传统的主观判断医学图像关键点的方式存在耗时耗力、准确度低等诸多问题,难以满足高精度医学影分析需求。
2、近年来,很多高校和研究机构都在致力于基于端到端的卷积神经网络的热力图回归的方式的研究,以建立准确的脊椎关键点定位,从而实现高精度的自动化手术机器人诊断和治疗,然而目前的研究仍然存在一些缺陷。例如专利申请cn112184617b“一种脊椎mri影像关键点检测方法”,其采用的是三阶段方式,首先采用yolov3目标检测网络对脊椎进行应的椎骨检测,然后再预测单个椎体的六个关键点,最后采用分割网络对获取的关键点进行修正。这种三阶段的关键点检测方式,结构复杂,模型参数量大,运行时间长。专利申请cn114581395a“一种脊椎医学图像的关键点检测方法”,首先从病人ct图像中分割出脊椎部分,然后采用unet进行单个脊椎图像的裁剪,最后采用vnet定位网络模型检测该单个脊椎的关键点位置,这三阶段的关键点预测方式结构复杂,模型参数量大,运行时间长。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种医学图像关键点检测方法和方法,其能够高效、准确的定位椎体中关键点的位置。
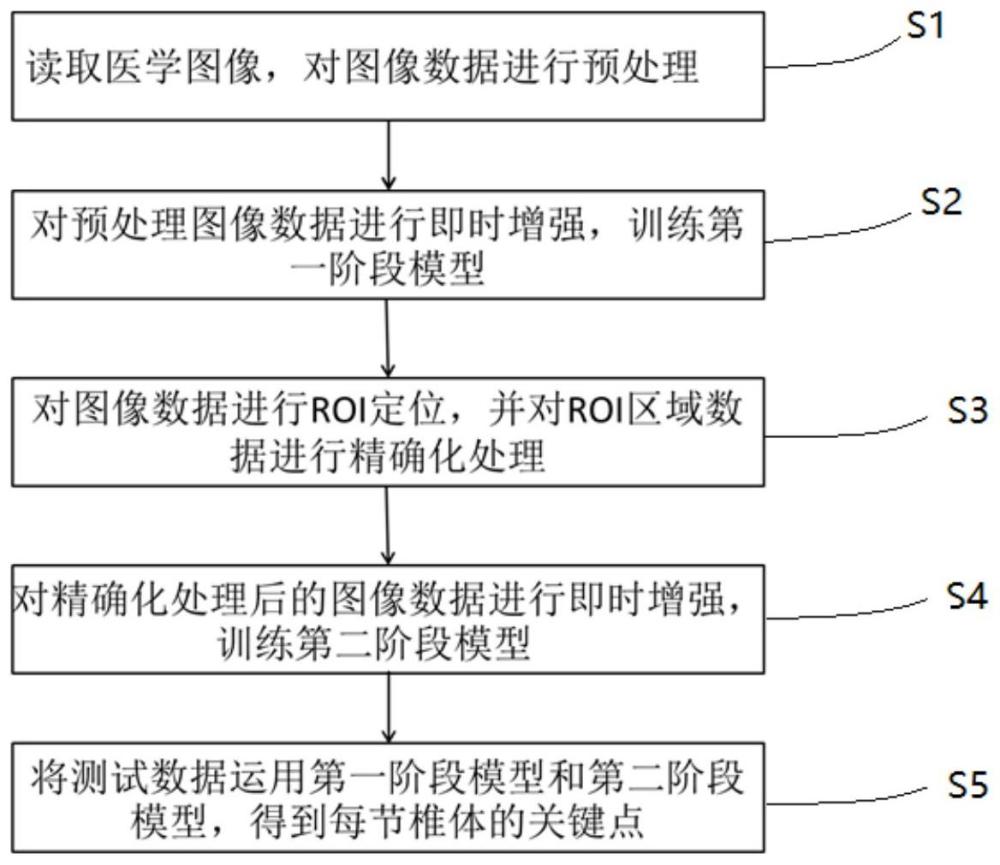
2、本发明的一方面提供了一种脊椎医学图像关键点检测方法,包括如下步骤:
3、步骤1:读取医学图像,对图像数据进行预处理;
4、步骤2:将步骤1得到的图像数据进行即时增强处理,训练第一阶段模型;
5、步骤3:对步骤2得到的图像数据对进行roi定位,并对roi区域数据进行精确化处理;
6、步骤4:将步骤3得到的图像数据进行即时增强处理,训练第二阶段模型;
7、步骤5:计算每节椎体的关键点坐标。
8、在一个实施例中,所述第一阶段模型为unet网络模型。
9、在一个实施例中,所述第二阶段模型为scn空间感知网络模型。
10、在一个实施例中,所述步骤1中的对图像数据进行预处理,具体包括:
11、步骤1-1:将图像数据进行统一的方向处理,统一到rai方向;
12、步骤1-2:对步骤1-1得到的数据进行重采样,使得每个维度的数据的具有等距,对每个椎骨进行m个初始关键点的标注,m为大于等于6的正整数;
13、步骤1-3:对步骤1-2得到的数据进行剪切处理。
14、在一个实施例中,步骤1-2中,每个维度的数据的空间辨率的范围为1mm~8mm,优选为2mm*2mm*2mm。
15、在一个实施例中,步骤1-2中还包括对数据划分为训练集和预测集。
16、在一个实施例中,步骤1-2中,m的范围为8~20,优选为10。
17、在一个实施例中,所述步骤2中,具体包括:
18、步骤2-1:对步骤1得到的图像数据和初始关键点坐标,进行即时增强处理;
19、步骤2-2:对步骤2-1得到的数据转化对应空间n个通道的热力图,得到网络训练的标签,所述转化公式如下:
20、
21、其中,g(x;σ)表示输出的热力图,γ表示缩放因子,d表示对应的维度,σ表示这个高斯方程的标准差,x表示空间对应点的坐标,g(x;σ)为该数据作为网络训练的标签;
22、步骤2-3:使用第一阶段模型进行训练,训练的真实值为对应的n个通道热力图,所述第一阶段模型为unet网络模型,其损失函数为:
23、
24、其中,h(x)为预测热图,α为热力图对应的高斯方程的标准差的惩罚项强度;
25、步骤2-4:计算每个通道中的最大值计算出对应的位置,该位置为椎体中心点,的计算公式为:
26、
27、其中,x表示空间对应点的坐标。
28、在一个实施例中,所述步骤2-1中的即时增强处理,为采用高斯核进行平滑处理、随机平移、随机旋转、随机缩放中的一种或几种组合的处理方式。
29、在一个实施例中,所述步骤3,具体包括:
30、步骤3-1:对步骤2中得到的椎体中心点,进行roi定位,获取单节椎体的roi区域;
31、步骤3-2:对roi区域的数据进行重采样,使每个维度的数据具有等距,其空间分辨率的范围为0.5mm~2mm,优选为1mm*1mm*1mm。
32、在一个实施例中,所述步骤4,具体包括:
33、步骤4-1:将步骤3中得到的图像数据和对应的关键点坐标数据进行即时增强处理;
34、步骤4-2:将关键点坐标数据转化为对应空间的热力图,其转化方式如下:
35、
36、其中g表示输出的热力图,γ表示缩放因子,d表示对应的维度,σ表示这个高斯方程的标准差,x表示空间对应点的坐标,g(x;σ)为该数据作为网络训练的标签;
37、步骤4-3:训练第二阶段模型,第二阶段模型为scn空间感知网络模型,所述第二阶段模型的损失函数如下:
38、
39、λ为正则化参数,w为网络的权重;
40、步骤4-5:计算每个通道中的最大值根据该最大值获取该位置的坐标为椎体关键点;的计算公式为:
41、
42、在一个实施例中,步骤4-1所述的即时增强处理,为采用高斯核进行平滑处理、随机平移、随机旋转、随机缩放中的一种或几种组合的处理方式。
43、在一个实施例中,所述步骤5,具体包括:
44、步骤5-1:对测试数据进行预处理,利用第一阶段模型获取椎体的中心点,利用第二阶段模型获取单节椎体的关键点;
45、步骤5-2:对脊椎的每节椎体进行关键点合并,得到椎体的所有关键点信息。
46、本发明的另一方面,提供了一种医学图像关键点检测系统,该系统包括:
47、获取模块,用于获取待测对象的图像数据;
48、第一阶段模型构建模块,用于训练第一阶段模型;
49、第二阶段模型构建模块,用于训练第二阶段模型;
50、预测模块,用于预测测试数据的预测值。
51、与现有技术相比,本发明具有如下的有益效果:
52、本发明提供的医学图像关键点检测方法和系统,具有以下有益效果:
53、1、整个检测方法为全自动流程,无需人工操作或干预,避免了繁琐的人工标注,减轻了医生的负担,也能够避免医生主观因素的影响,同时使批量化处理大规模的数据成为可能;
54、2、通过第一阶段模型和第二阶段模型的拟合,关键点信息的准确率大大提高,而且泛化性能好,避免过拟合现象,在利用机器人进行手术时,提高手术机器人的准确性,同时实现了患者较低的辐射暴露;
55、3、获取关键点的时间减小,使得手术时间缩短,降低了医生的负担,提高了手术的成功率。
- 还没有人留言评论。精彩留言会获得点赞!