一种漂浮式风机叶尖气隙数值模拟方法
本发明涉及风机气隙研究,具体地,涉及一种漂浮式风机叶尖气隙数值模拟方法。
背景技术:
1、当前,风电产业逐渐朝着“漂浮式,深远海,大型化”方向发展,以充分利用深远海丰富优质的风能资源。采用漂浮式基础浮体的方式开发风电资源,将成为今后我国沿海地区能源开发和利用的主要形式。针对漂浮式风机开展风机叶尖气隙的数值模拟预报和工程应用研究在保障风机使用的安全性上具有重要的意义,可以为漂浮式风机的基础浮体结构选型设计和安全性评估提供技术和数据支撑。
2、传统漂浮式风机在风浪流联合作用下的气隙预报问题,多集中于基础浮体平台的气隙预报研究,进而为基础浮体平台的甲板上浪评估提供参考。但对于海上漂浮式风机来说,风机叶片由于其结构较长,不利海洋环境下大浪对叶片的安全性影响需要更为细致地校核,然而现阶段对于漂浮式风机的叶尖气隙预报相关研究方法较少。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的在于提供一种漂浮式风机叶尖气隙数值模拟方法,用于为漂浮式风机的工程设计和性能优化提供数据参考,具有较高的工程应用价值。
2、为解决上述问题,本发明的技术方案为:
3、一种漂浮式风机叶尖气隙数值模拟方法,包括以下步骤:
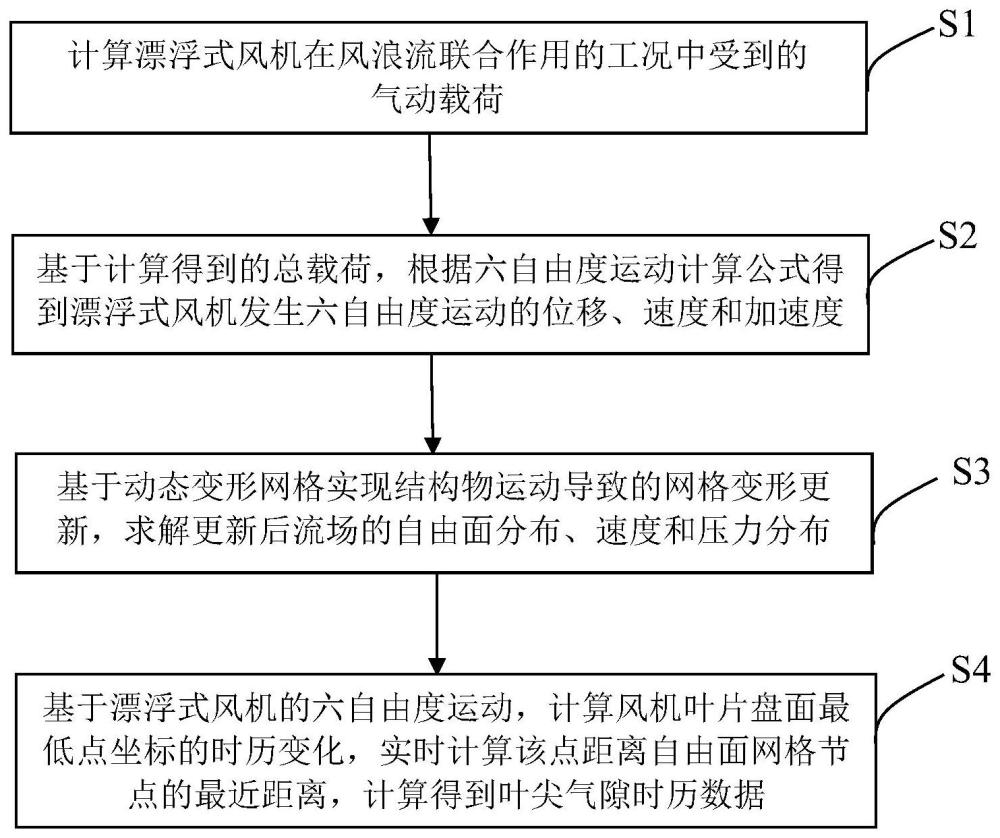
4、计算漂浮式风机在风浪流联合作用的工况中受到的气动载荷;
5、基于计算得到的总载荷,根据六自由度运动计算公式得到漂浮式风机发生六自由度运动的位移、速度和加速度;
6、基于动态变形网格实现结构物运动导致的网格变形更新,求解更新后流场的自由面分布、速度和压力分布;
7、基于漂浮式风机的六自由度运动,计算风机叶片盘面最低点坐标的时历变化,实时计算该点距离自由面网格节点的最近距离,计算得到叶尖气隙时历数据。
8、优选地,所述计算漂浮式风机在风浪流联合作用的工况中受到的气动载荷的步骤,具体包括:
9、计算漂浮式风机遭受的浪、流载荷;
10、计算系泊系统提供的系泊载荷;
11、计算漂浮式风机遭受的风载荷。
12、优选地,所述计算基础浮体遭受的浪、流载荷的步骤具体包括:流场是在大地坐标系下求解的,因此力和力矩同样是在大地坐标系下计算得到,首先平台上每个单元面所受到的水动力为:dfe=τ·d|sf|+pdsf,其中,sf是平台表面单元面的法相向量,指向平台内部,它的模等于平台表面单元面的面积;下标e代表是在大地坐标系下;τ是剪应力,p是总压,在计算得到了平台表面每一个单元面上的总力后,积分求得整个平台所受到的合力以及合力矩:
13、优选地,所述计算系泊系统提供的系泊载荷的步骤具体包括:将系泊缆绳等分成若干个系泊单元,通过对每个系泊单元进行静力学分析,结合边界条件,依次外推计算得到每个系泊单元的张力和形状,系泊单元的静力平衡方程为:
14、其中,t代表系泊张力,为系泊张力与其水平分量的夹角,f和d分别表示系泊单元受到的流体力切向力和法向力,dl和ds分别表示锚链单元拉伸前后的长度,w是系泊单元在水中的湿重,ρ为流体密度,g代表重力加速度,a是系泊单元的截面积,δz′为系泊单元两个节点之间的垂向间距,系泊单元受到的流体力通过morison公式进行计算:其中,cdn和cdt分别表示系泊单元沿法向和切向的阻力系数,dm为系泊单元的直径,un和ut分别代表系泊单元附近的流场速度在法向和切向的分量,系泊缆绳拉升后的长度通过下面的公式进行计算:其中,ea代表系泊缆绳的抗拉刚度。
15、优选地,所述计算漂浮式风机遭受的风载荷的步骤具体包括:根据攻角信息,在风机叶片翼型气动数据库中进行插值,得到此时的升力系数cl和阻力系数cd,风力机叶片上的气动载荷f通过下式进行计算:其中,l和d分别表示作用在翼型截面处气动升力和气动阻力,ρ表示空气的密度,c代表翼型截面的弦长,nb表示风力机叶片的个数,el和ed分别表示叶片随体坐标下x方向和y方向的单位矢量;通过将风力机叶片单元上受到的气动载荷沿叶片径向进行积分,得到风力机叶片受到的气动推力t为:其中,di代表作用在叶片致动单元上的阻力,np表示叶片致动点的数量,ri表示第i个致动点到叶根的距离。
16、优选地,所述基于计算得到的总载荷,根据六自由度运动计算公式得到漂浮式风机发生六自由度运动的位移、速度和加速度的步骤,具体包括:基于计算得到的总载荷,将漂浮式风机整体看作刚体,根据六自由度运动计算公式得到漂浮式风机发生六自由度运动的速度和加速度,为了计算漂浮式风机的六自由度运动,需要开展局部坐标系和大地坐标系之间的坐标转换,转换公式为:其中,下标e代表大地坐标系下力和力矩,s则代表局部坐标系。
17、优选地,所述基于计算得到的总载荷,根据六自由度运动计算公式得到漂浮式风机发生六自由度运动的位移、速度和加速度的步骤,具体包括:漂浮式风机运动的加速度可以在局部坐标系下通过六自由度刚体运动方程求得:
18、
19、其中,(xg,yg,zg)为重心到旋转中心的向量的三个分量,(ix,iy,iz)为绕旋转中心点的主转动惯量;在通过六自由度刚体运动方程求得到六个自由度的加速度后,再对其进行积分,得到在局部坐标系下的六个自由度的速度,并通过运动方程转换至大地坐标系下;并根据网格求解器的要求,进行进一步积分得到位移,网格求解器根据大地坐标系下的速度或者位移来计算得到网格节点的位移。
20、优选地,所述基于动态变形网格实现结构物运动导致的网格变形更新,求解更新后流场的自由面分布、速度和压力分布的步骤,具体包括:
21、基于漂浮式风机发生运动的位移和速度,得到漂浮式风机贴体表面位置的流场网格位移量或运动速度,基于拉普拉斯方程计算得到流场网格坐标的更新量,并实现动网格的变形更新;
22、根据网格变形更新后的流场,求解自由面相分数方程,得到自由面分布;
23、重新计算更新后流场的速度和压力分布,并进行湍流修正,将本时间步计算结果输出。
24、优选地,所述基于漂浮式风机的六自由度运动,计算风机叶片盘面最低点坐标的时历变化,实时计算该点距离自由面网格节点的最近距离,计算得到叶尖气隙时历数据的步骤,具体包括:将叶尖气隙定义为叶片盘面最低点距离自由面的最短距离,叶尖气隙计算公式为:a(x,y,t)=z(x,y,t)-η(x,y,t),其中:a(s,y,t)是某时刻下风机叶片盘面的叶尖气隙值,由于漂浮式风机会在波浪的作用下发生六自由度运动,因此风机叶尖盘面的最低点坐标z(x,y,t)会随测点的x和y方向空间位置和时间发生变化,同时该测点位置的波浪高度η(x,y,t)也是空间和时间的函数。在恶劣海况下,这个变化可能会非常剧烈。基于叶片盘面最低点开展的叶尖气隙计算首先基于漂浮式风机整体的初始重心坐标g(x,y,z)、叶片盘面初始坐标c(x,y,z)和每一时刻的六自由度运动计算结果(surge,sway,heave,roll,pitch,yaw),计算得到风机叶片盘面最低点的位置坐标a(x,y,z)。之后基于风机叶片盘面最低点的空间位置坐标a(x,y,z)遍历该空间位置距离自由面流场网格节点的最短距离,并将该数值作为该时刻的叶尖气隙数值a(x,y,t)。
25、优选地,所述基于漂浮式风机的六自由度运动,计算风机叶片盘面最低点坐标的时历变化,实时计算该点距离自由面网格节点的最近距离,计算得到叶尖气隙时历数据的步骤,具体包括:用g(gx,gy,gz)、c(cx,cy,cz)、a(ax,ay,az)分别表示漂浮式风机整体的初始重心坐标、叶片盘面初始坐标、风机叶片盘面最低点坐标,用(θx,θy,θz)表示漂浮式风机发生的转动角度(roll,pitch,yaw),用(dx,dy,dz)表示漂浮式风机发生的线位移(surge,sway,heave),在每一时刻需要将风机叶片盘面最低点a点位置的空间坐标进行实时更新,根据刚体的六自由度运动计算理论得到a点坐标的实时更新公式为:
26、式中,φ表示初始时刻风机叶片盘面的倾斜角,r表示风机叶片的半径。
27、与现有技术相比,本发明的漂浮式风机叶尖气隙数值模拟方法通过风机气动载荷计算、系泊系统张力计算以及漂浮式风机六自由度运动计算,突破风机叶尖气隙的动态数值预报技术,基于风机叶片盘面的最低点坐标时历计算结果,遍历该空间位置距离自由面的最小距离,从而计算得到叶尖气隙时历数据,从而为漂浮式风机的设计和优化提供数据参考。
- 还没有人留言评论。精彩留言会获得点赞!