光伏故障的定位方法、装置、设备及介质与流程
本申请涉及故障检测的,尤其涉及一种光伏故障的定位方法、光伏故障的定位装置、光伏故障的定位设备及计算机可读存储介质。
背景技术:
1、在光伏电站的无人机巡检中,对拍摄的红外图像进行故障检测能有效的检测出故障点在单张红外图像区域中的位置,但受限于拍摄图像的镜头旋转和平移等因素影响,单张红外图像的携带的经纬度坐标无法准确计算出故障点的坐标。
2、目前,采用三维重建的方式来恢复图像中对应的场景点云,进而确定故障点的坐标,其中采用三维重建得到的场景点云具有稀疏特性,并不是图像中的每个像素点均对应有三维点云。而后续的故障点坐标的定位方法依赖于故障组件所在的光伏板具有点云,然而实际情况是故障点所在的光伏板上往往无点云或者点云数量不足,导致该故障点定位时被遗漏,难以获得故障点更加精准的定位。
技术实现思路
1、本申请的主要目的在于提供一种光伏故障的定位方法、光伏故障的定位装置、光伏故障的定位设备及计算机可读存储介质,旨在精准定位光伏故障。
2、为实现上述目的,本申请提供一种光伏故障的定位方法,所述方法包括:
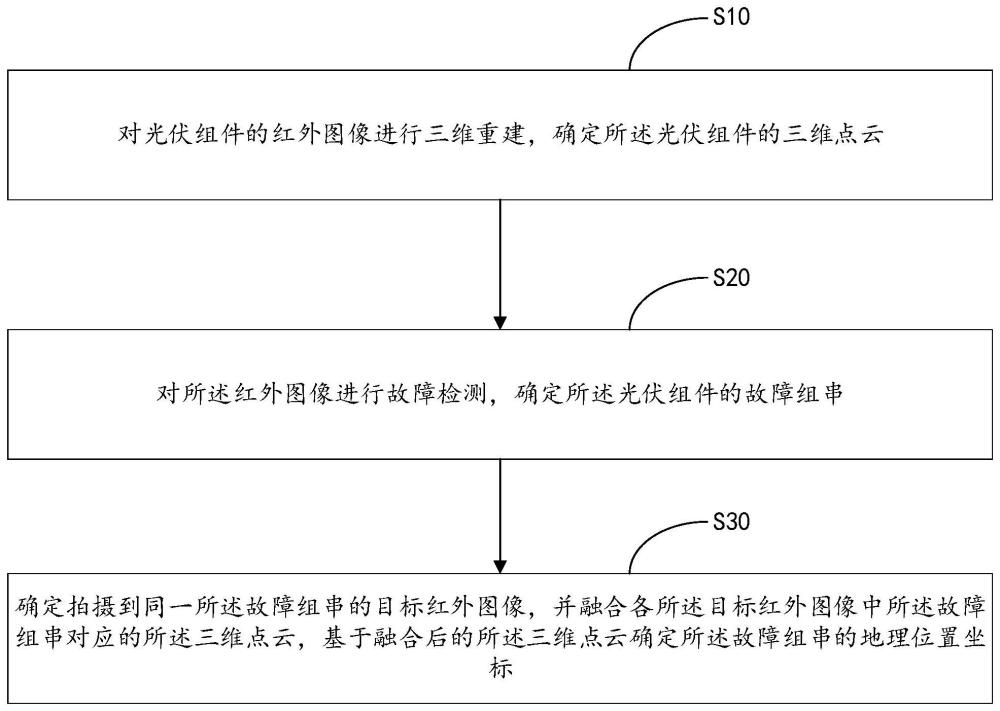
3、对光伏组件的红外图像进行三维重建,确定所述光伏组件的三维点云;
4、对所述红外图像进行故障检测,确定所述光伏组件的故障组串;
5、确定拍摄到同一所述故障组串的目标红外图像,并融合各所述目标红外图像中所述故障组串对应的所述三维点云,基于融合后的所述三维点云确定所述故障组串的地理位置坐标。
6、示例性的,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
7、确定所述故障组串对应的故障点,并确定所述故障点最多的红外图像;
8、基于所述故障点最多的红外图像,确定拍摄到同一所述故障组串的目标红外图像。
9、示例性的,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
10、确定拍摄到所述故障组串的待定红外图像,并确定所述待定红外图像之间的重叠度;
11、在所述重叠度大于预设重叠度阈值的所述待定红外图像中,确定拍摄到同一所述故障组串的目标红外图像。
12、示例性的,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
13、提取所述红外图像的经纬度,通过所述经纬度构建得到所述红外图像的邻近匹配对;
14、基于所述邻近匹配对确定匹配的红外图像,并确定所述匹配的红外图像为拍摄到同一所述故障组串的目标红外图像。
15、示例性的,所述融合各所述目标红外图像中所述故障组串对应的所述三维点云的步骤,包括:
16、分别提取所述匹配的红外图像中的特征点,并通过特征点匹配追踪所述匹配的红外图像中的同名特征点;
17、通过所述同名特征点确定所述匹配的红外图像的单应性矩阵,并基于所述单应性矩阵,将其中一所述目标红外图像中所述故障组串对应的所述三维点云,映射至另一所述目标红外图像中,或者,将其中一所述目标红外图像中的故障点映射到另一所述目标红外图像中。
18、示例性的,所述通过特征点匹配追踪所述匹配的红外图像中的同名特征点的步骤,包括:
19、增加所述匹配的红外图像中其中一红外图像对另一红外图像的额外冗余检测框以及所述故障组串的故障类型判定,确定目标特征点,其中,所述额外冗余检测框的宽度大于或者小于故障检测框的宽度,和/或,额外冗余检测框的长度大于或者小于故障检测框的长度;
20、基于所述目标特征点进行特征点匹配,追踪所述匹配的红外图像中的同名特征点。
21、示例性的,所述方法还包括:
22、对光伏组件的红外图像进行三维重建,确定所述光伏组件的三维点云;
23、对所述红外图像进行故障检测,确定所述故障组串中的故障组件;
24、追踪拍摄到所述故障组件的目标红外图像,并融合所述目标红外图像中所述故障组件的所述三维点云,基于融合后的所述三维点云确定所述故障组件的地理位置坐标。
25、示例性的,所述基于融合后的所述三维点云确定所述故障组串的地理位置坐标的步骤之后,包括:
26、对所述地理位置坐标进行去重处理,并在所述光伏组件所在的全景地图上标记去重后的所述地理位置坐标。
27、本申请还提供一种光伏故障的定位装置,所述装置包括:
28、重建模块,用于对光伏组件的红外图像进行三维重建,确定所述光伏组件的三维点云;
29、检测模块,用于对所述红外图像进行故障检测,确定所述光伏组件的故障组串;
30、确定模块,用于确定拍摄到同一所述故障组串的目标红外图像,并融合各所述目标红外图像中所述故障组串对应的所述三维点云,基于融合后的所述三维点云确定所述故障组串的地理位置坐标。
31、本申请还提供一种光伏故障的定位设备,所述光伏故障的定位设备包括:存储器、处理器、及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的光伏故障的定位方法的步骤。
32、本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的光伏故障的定位方法的步骤。
33、本申请实施例提出的一种光伏故障的定位方法、光伏故障的定位装置、光伏故障的定位设备及计算机可读存储介质,对光伏组件的红外图像进行三维重建,确定所述光伏组件的三维点云;对所述红外图像进行故障检测,确定所述光伏组件的故障组串;确定拍摄到同一所述故障组串的目标红外图像,并融合各所述目标红外图像中所述故障组串对应的所述三维点云,基于融合后的所述三维点云确定所述故障组串的地理位置坐标。
34、在本申请中,提出一种用于增加光伏故障的故障点所在组串表面的共面点云数量的方法。首先,对光伏组件的红外图像进行三维重建,确定光伏组件的三维点云,并对红外图像进行故障检测,确定光伏组件的故障组串;然后,确定拍摄到同一故障组串的目标红外图像,并融合各目标红外图像中故障组串对应的三维点云,基于融合后的三维点云确定故障组串的地理位置坐标。从而,即使是故障点所在的光伏板上无点云,也能通过增加点云后确定光伏组件的故障组串的地理位置坐标,进而减少故障点定位的遗漏,精准全面的定位光伏故障。
技术特征:
1.一种光伏故障的定位方法,其特征在于,所述方法包括:
2.如权利要求1所述的光伏故障的定位方法,其特征在于,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
3.如权利要求1所述的光伏故障的定位方法,其特征在于,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
4.如权利要求1所述的光伏故障的定位方法,其特征在于,所述确定拍摄到同一所述故障组串的目标红外图像的步骤,包括:
5.如权利要求4所述的光伏故障的定位方法,其特征在于,所述融合各所述目标红外图像中所述故障组串对应的所述三维点云的步骤,包括:
6.如权利要求5所述的光伏故障的定位方法,其特征在于,所述通过特征点匹配追踪所述匹配的红外图像中的同名特征点的步骤,包括:
7.如权利要求1所述的光伏故障的定位方法,其特征在于,所述方法还包括:
8.如权利要求1所述的光伏故障的定位方法,其特征在于,所述基于融合后的所述三维点云确定所述故障组串的地理位置坐标的步骤之后,包括:
9.一种光伏故障的定位装置,其特征在于,所述装置包括:
10.一种光伏故障的定位设备,其特征在于,所述光伏故障的定位设备包括:存储器、处理器、及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8任一项所述的光伏故障的定位方法的步骤。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的光伏故障的定位方法的步骤。
技术总结
本申请公开了一种光伏故障的定位方法、装置、设备及介质,属于故障检测技术领域。在本申请中,提出一种用于增加光伏故障的故障点所在组串表面的共面点云数量的方法。首先,对光伏组件的红外图像进行三维重建,确定光伏组件的三维点云,并对红外图像进行故障检测,确定光伏组件的故障组串;然后,确定拍摄到同一故障组串的目标红外图像,并融合各目标红外图像中故障组串对应的三维点云,基于融合后的三维点云确定故障组串的地理位置坐标。从而,即使是故障点所在的光伏板上无点云,也能通过增加点云后确定光伏组件的故障组串的地理位置坐标,进而减少故障点定位的遗漏,精准全面的定位光伏故障。
技术研发人员:王新乐,方振宇,张锐
受保护的技术使用者:阳光智维科技股份有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!