转子故障诊断方法、装置、电子设备及介质与流程
本发明涉及机械设备,尤其涉及一种转子故障诊断方法、装置、电子设备及介质。
背景技术:
1、旋转机械设备的运行状态监控、故障预警与诊断是现代工业生产过程中非常关键的一项技术。近些年来,随着计算机技术、信号检测与处理技术、信号识别技术以及故障诊断技术的飞速发展,在生产过程中对设备运行状态进行实时监控,对设备出现的故障进行实时预警、实时诊断与分类也变得越发可能。
2、目前用于旋转机械设备故障预警的方法主要包括两大类,一类是基于设备状态监测数据的故障预警模型与算法,另一种则是基于旋转机械故障机理模型来进行设备的故障预警与故障诊断。上述方法在实际应用过程中存在设备故障原因和故障发生位置定位困难的问题,导致设备故障预警准确性不高。
技术实现思路
1、本发明提供一种转子故障诊断方法、装置、电子设备及介质,用以解决现有技术中设备故障预警准确性不高的技术问题。
2、本发明提供一种转子故障诊断方法,包括:
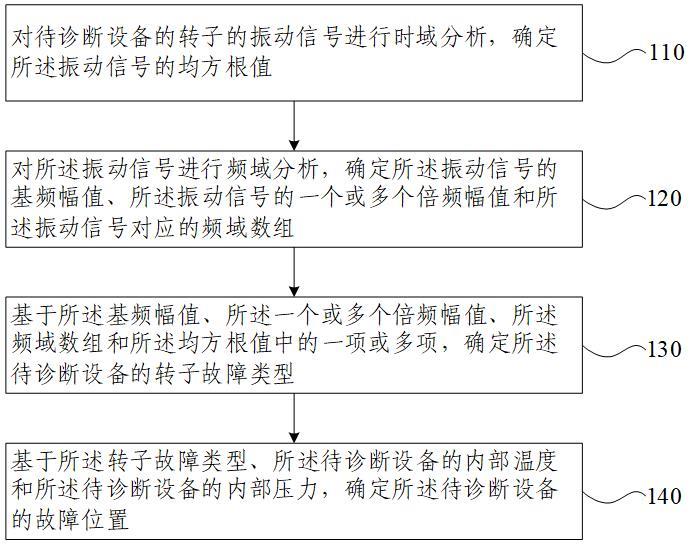
3、对待诊断设备的转子的振动信号进行时域分析,确定所述振动信号的均方根值;
4、对所述振动信号进行频域分析,确定所述振动信号的基频幅值、所述振动信号的一个或多个倍频幅值和所述振动信号对应的频域数组,所述振动信号包括以下至少一项:径向振动加速度信号、轴向振动加速度信号和垂向振动加速度信号;
5、基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型;
6、基于所述转子故障类型、所述待诊断设备的内部温度和所述待诊断设备的内部压力,确定所述待诊断设备的故障位置。
7、在一些实施例中,在所述振动信号包括所述径向振动加速度信号、所述轴向振动加速度信号和所述垂向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
8、在所述基频幅值和所述频域数组满足第一条件情况下,确定所述转子故障类型为轴不平衡;
9、所述第一条件包括:
10、所述径向振动加速度信号的基频幅值大于所述轴向振动加速度信号的基频幅值,且所述轴向振动加速度信号的基频幅值与所述径向振动加速度信号的基频幅值的比值小于第一阈值;
11、所述轴向振动加速度信号的基频幅值与所述垂向振动加速度信号的基频幅值的比值在第一预设范围内;
12、所述频域数组中的次大幅值与最大幅值的比值小于第二阈值。
13、在一些实施例中,所述一个或多个倍频幅值包括所述径向振动加速度信号的2倍频幅值;
14、在所述振动信号包括所述径向振动加速度信号和所述轴向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
15、在所述基频幅值和所述均方根值满足第二条件的情况下,确定所述转子故障类型为轴线平行不对中;
16、所述第二条件包括:
17、所述径向振动加速度信号的均方根值大于径向标准幅值,所述径向标准幅值为所述径向振动加速度信号在时域下的标准幅值;
18、所述径向振动加速度信号的基频幅值与所述径向振动加速度信号的2倍频幅值的比值大于第三阈值。
19、在一些实施例中,所述一个或多个倍频幅值包括:所述径向振动加速度信号的2倍频幅值和所述径向振动加速度信号的n倍频幅值,n为大于等于4且小于等于10的整数;
20、在所述振动信号包括所述径向振动加速度信号和所述轴向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
21、在所述基频幅值和所述一个或多个倍频幅值满足第三条件的情况下,确定所述转子故障类型为轴线角度不对中;
22、所述第三条件包括:
23、轴向标准幅值与所述轴向振动加速度信号的基频幅值的比值小于第四阈值,所述轴向标准幅值为所述轴向振动加速度信号在时域下的标准幅值;
24、所述径向振动加速度信号的基频幅值与径向标准幅值的比值小于第五阈值,所述径向振动加速度信号的2倍频幅值与所述径向标准幅值的比值小于第六阈值;
25、所述径向振动加速度信号的n倍频幅值与所述径向标准幅值的比值小于第七阈值。
26、在一些实施例中,所述一个或多个倍频幅值包括:所述径向振动加速度信号的2倍频幅值和所述径向振动加速度信号的n倍频幅值,n为大于等于4且小于等于10的整数;
27、在所述振动信号包括所述径向振动加速度信号和所述轴向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
28、在所述基频幅值和所述一个或多个倍频幅值满足第四条件的情况下,确定所述转子故障类型为轴线角度不对中;
29、所述第四条件包括:
30、所述径向振动加速度信号的基频幅值的所述轴向振动加速度信号的基频幅值的比值在第二预设范围内;
31、所述径向振动加速度信号的基频幅值与径向标准幅值的比值小于第八阈值且所述径向振动加速度信号的2倍频幅值小于第九阈值;
32、所述径向振动加速度信号的n倍频幅值与所述径向标准幅值的比值小于第十阈值。
33、在一些实施例中,所述一个或多个倍频幅值包括:所述径向振动加速度信号的2倍频幅值和所述轴向振动加速度信号的2倍频幅值;
34、在所述振动信号包括所述径向振动加速度信号和所述轴向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
35、在所述基频幅值和所述一个或多个倍频幅值满足第五条件的情况下,确定所述转子故障类型为轴线组合不对中,所述轴线组合不对中包括轴线平行不对中和轴线角度不对中;
36、所述第五条件包括:
37、所述径向振动加速度信号的均方根值大于径向标准幅值;
38、所述轴向振动加速度信号的均方根值大于轴向标准幅值;
39、所述径向振动加速度信号的基频幅值与所述径向振动加速度信号的2倍频幅值的比值小于第十一阈值;
40、所述轴向振动加速度信号的基频幅值与所述轴向振动加速度信号的2倍频幅值的比值小于第十二阈值。
41、在一些实施例中,在所述振动信号包括所述径向振动加速度信号、所述轴向振动加速度信号和所述垂向振动加速度信号的情况下,所述基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型,包括:
42、在所述基频幅值满足第六条件的情况下,确定所述转子故障类型为轴弯曲;
43、所述第六条件包括:
44、所述振动信号在垂直方向上存在水平不对中的故障、在径向上存在角度不对中的故障且在轴向上存在角度不对中的故障;
45、径向标准幅值与所述径向振动加速度信号的基频幅值的比值小于第十三阈值。
46、本发明还提供一种转子故障诊断装置,包括:
47、第一确定模块,用于对待诊断设备的转子的振动信号进行时域分析,确定所述振动信号的均方根值;
48、第二确定模块,用于对所述振动信号进行频域分析,确定所述振动信号的基频幅值、所述振动信号的一个或多个倍频幅值和所述振动信号对应的频域数组,所述振动信号包括以下至少一项:径向振动加速度信号、轴向振动加速度信号和垂向振动加速度信号;
49、第三确定模块,用于基于所述基频幅值、所述一个或多个倍频幅值、所述频域数组和所述均方根值中的一项或多项,确定所述待诊断设备的转子故障类型;
50、第四确定模块,用于基于所述转子故障类型、所述待诊断设备的内部温度和所述待诊断设备的内部压力,确定所述待诊断设备的故障位置。
51、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述转子故障诊断方法。
52、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述转子故障诊断方法。
53、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述转子故障诊断方法。
54、本发明提供的转子故障诊断方法、装置、电子设备及介质,通过对待诊断设备的转子的径向振动加速度信号、轴向振动加速度信号和垂向振动加速度信号进行频域分析和时域分析,得到频域分析数据和时域分析数据,然后结合表征设备运行状态的待诊断设备的内部温度和内部压力,可以确定转子故障类型以及故障位置,提高了故障诊断的准确性,同时故障诊断结果出现误报警和漏报警的概率会大大降低,转子故障发生部位的定位也会更加准确,引起转子故障发生的原因也会更加明确。
- 还没有人留言评论。精彩留言会获得点赞!