一种基于机器视觉的掘锚设备距离估计方法
本发明属于矿用设备运行状态监测领域,涉及距离估计方法,具体是一种一种基于机器视觉的掘锚设备距离估计方法。
背景技术:
1、随着现代工业技术的快速发展,机器视觉技术在工业自动化领域中得到广泛应用。掘锚设备是一种重要的工业机械设备,其操作的安全性和可靠性对产量和人员至关重要。目前的掘锚设备通常采用激光测距、超声波测距等传统方法来实现距离测量。但这些方法有着一些不足之处,例如激光测距受环境光线影响大,超声波测距易受到物体表面的反射影响等。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于,提供一种基于机器视觉的掘锚设备距离估计方法,以解决现有技术的距离测量易受外部环境影响导致准确率不高的技术问题。
2、为了解决上述技术问题,本发明采用如下技术方案予以实现:
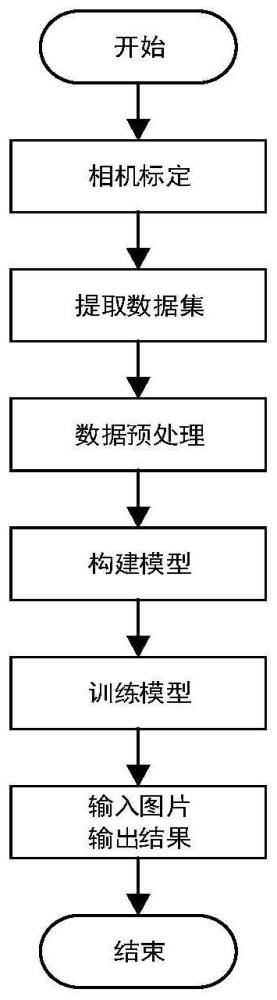
3、一种基于机器视觉的掘锚设备距离估计方法,具体包括以下步骤:
4、步骤一,对相机进行处理,得到相机的内参、畸变系数和外参;
5、步骤二,采用kitti数据集作为实验数据集,选取kitti数据集中的矿井数据,包括多张rgb图像和各自对应的深度数据;
6、步骤三,对步骤二选取的矿井数据进行预处理,并将其划分为训练集、验证集和测试集;
7、步骤四,构建cnn卷积神经网络模型;
8、所述的cnn卷积神经网络模型包括相连接的depthcnn模型和posecnn模型;
9、步骤五,将训练集输入到构建好的cnn卷积神经网络模型中进行训练,得到训练好的cnn卷积神经网络模型,采用验证集和测试集对训练好的cnn卷积神经网络模型依次进行验证和测试,得到最终的cnn卷积神经网络模型;
10、步骤六,采用经过步骤一处理后的相机采集掘进机图片;
11、步骤七,将步骤六采集的掘进机图片输入到步骤五得到最终的cnn卷积神经网络模型中,得到处理后的掘进机图片;
12、所述的处理后的掘进机图片用于显示各个位置的掘进机和锚杆机之间的距离。
13、本发明还包括以下技术特征:
14、所述的步骤一具体包括以下步骤:
15、步骤1.1,使用张正友标定法,在matlab标定平台上对事件相机进行标定,得到内参;
16、步骤1.2,利用步骤1.1得到的内参对相机进行畸变矫正,得到畸变系数;
17、步骤1.3,对步骤1.2矫正后的相机进行外参标定,得到外参。
18、所述的步骤三具体包括以下步骤:
19、步骤3.1,去除矿井数据中不完整的rgb图像;
20、步骤3.2,对经过步骤3.1处理后的矿井数据中的rgb图像进行增强操作和像素归一化处理;
21、步骤3.3,将经过步骤3.2处理后的矿井数据按照7:1:2的比例随机分成训练集、验证集和测试集。
22、步骤四中,所述的depthcnn模型和posecnn模型的结构如下:
23、所述的depthcnn模型包括5个卷积层,每一个卷积层的卷积核大小分别为7、5、5、3、3,每个卷积层分别连接一个relu激活函数和一个dropout激活函数,第四层和第五层卷积层上分别连接有一个全连接层;
24、所述的posecnn模型包括4个卷积层、1个全连接层和1个预测层,每一个卷积层的卷积核大小分别为7、7、5、5,每个卷积层分别连接一个relu激活函数和一个dropout激活函数。
25、本发明与现有技术相比,有益的技术效果是:
26、本发明基于单目深度估计方法,通过去除不完整的图像、增强操作和像素归一化处理,提高了矿井数据的质量,减少了噪声和干扰,提高了后续模型的训练效果;此外depthcnn模型和posecnn模型采用多层卷积层和全连接层的结构,能够有效地提取图像特征和姿态信息,增强模型的非线性拟合能力,同时防止了过拟合以及梯度消失和梯度爆炸的情况,解决了现有技术的距离测量易受外部环境影响导致准确率不高的技术问题。
技术特征:
1.一种基于机器视觉的掘锚设备距离估计方法,其特征在于,具体包括以下步骤:
2.如权利要求1所述的基于机器视觉的掘锚设备距离估计方法,其特征在于,所述的步骤一具体包括以下步骤:
3.如权利要求1所述的基于机器视觉的掘锚设备距离估计方法,其特征在于,所述的步骤三具体包括以下步骤:
4.如权利要求1所述的基于机器视觉的掘锚设备距离估计方法,其特征在于,步骤四中,所述的depthcnn模型和posecnn模型的结构如下:
技术总结
本发明公开了一种基于机器视觉的掘锚设备距离估计方法,包括:对相机进行处理,得到相机的内参、畸变系数和外参;采用KITTI数据集作为实验数据集,选取KITTI数据集中的矿井数据,对步骤二选取的矿井数据进行预处理,并将其划分为训练集、验证集和测试集;基于单目深度估计方法,通过去除不完整的图像、增强操作和像素归一化处理,提高了矿井数据的质量,减少了噪声和干扰,提高了后续模型的训练效果;此外DepthCNN模型和PoseCNN模型采用多层卷积层和全连接层的结构,能够有效地提取图像特征和姿态信息,增强模型的非线性拟合能力,同时防止了过拟合以及梯度消失和梯度爆炸的情况,解决了现有技术的距离测量易受外部环境影响导致准确率不高的技术问题。
技术研发人员:张旭辉,杨文娟,张冉,康乐,汤杜伟,蒋杰
受保护的技术使用者:西安科技大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!