一种电气设备支架定位系统的制作方法
本发明涉及电气装配,尤其涉及一种电气设备支架定位系统。
背景技术:
1、支架定位系统广泛用于工业、建筑和能源领域,支架定位系统的应用可以提高设备安装的准确性和效率,并减少人工测量和调整的工作量,它可以在建设、维护和升级电气设备时发挥重要作用,并确保设备在正确的位置上安装,控制单元计算支架的精确位置通常涉及使用多种定位技术和算法,以实现对电气设备支架的精准定位,本领域技术人员基于相关技术和算法进行不断地优化,越来越多的电气设备支架定位系统被开发以及投入到工业、建筑和能源领域中。
2、中国专利公开号:cn114746220a,公开了一种定位设备(14),包括:基部结构(18);第一工件支架(20);第二工件支架(22);支撑所述第一工件支架(20)和所述第二工件支架(22)的支撑构件(44);以及驱动装置(42),其设置成将所述支撑构件(44)相对于所述基部结构(18)从第一位置(38)驱动到第二位置(40),在所述第一位置,所述第一工件支架(20)定位在所述基部结构(18)的处理侧(32),并且所述第二工件支架(22)定位在所述基部结构(18)的相对的装载侧(34),在所述第二位置,所述第一工件支架(20)定位在所述装载侧(34),并且所述第二工件支架(22)定位在所述处理侧(32);其特征在于,所述驱动装置(42)设置成当将所述支撑构件(44)从所述第一位置(38)驱动到所述第二位置(40)时,沿第一路径(74)驱动所述第一工件支架(20),并且沿第二路径(76)驱动所述第二工件支架(22),所述第一和第二路径(74、76)是非圆形的。
3、现有技术中还存在以下问题
4、现有技术中未考虑在对电气设备支架进行三维模型的对比过程中,参加对比的数据量过于庞大,现有技术不能对建立的三维模型进行筛选出特征局部模型参与对比,并基于局部特征模型的差异表征整体的差异,造成了大量冗余数据参与系统内的对比计算,影响了定位系统的运行效率。
技术实现思路
1、为解决参加对比的数据量过于庞大,现有技术不能对建立的三维模型进行筛选出特征局部模型参与对比,不能基于局部特征模型的差异表征整体的差异的问题,本发明提供电气设备支架定位系统,包括:
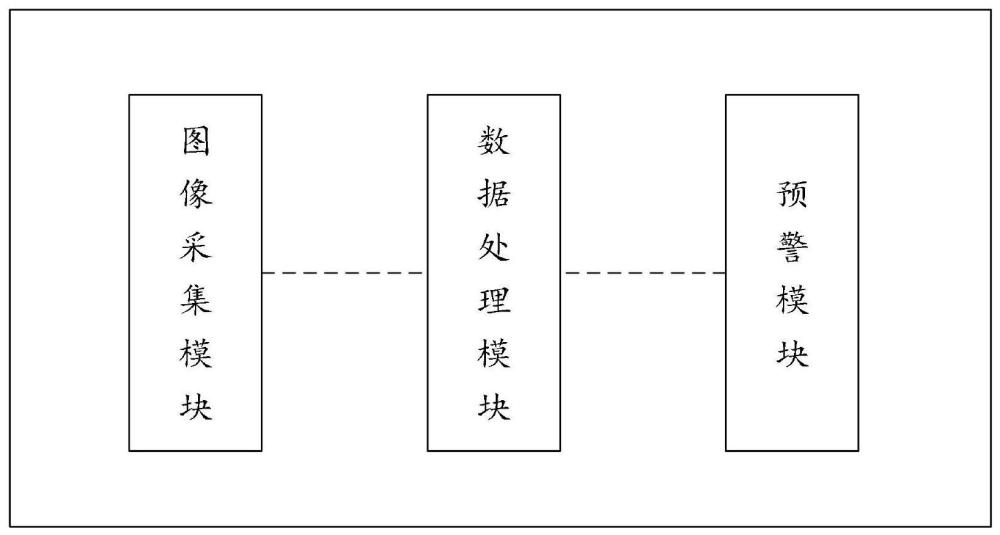
2、图像采集模块,其包括设置在装配区域一侧用以采集装配区域内装配组件点云数据的图像采集单元;
3、数据处理模块,其与所述图像采集模块连接,用以接收所述图像采集模块发出的数据,包括建模单元以及分析单元;
4、所述建模单元用以接收图像采集模块采集的点云数据,基于所述点云数据构建装配组件的三维坐标模型,并划分所述三维坐标模型为若干局部模型,基于各局部模型的点云数据差异判定所述局部模型是否为特征局部模型;
5、所述分析单元用以将所述特征局部模型与数据库内对应的标准模型的进行对比,确定各特征局部模型的异性量,基于所述异性量筛选出表征性局部模型,基于各所述表征性局部模型的异性量计算所述三维坐标模型的异性表征值,基于所述异性表征值判定所述三维坐标模型是否发生定位异常;
6、预警模块,其与所述数据处理模块连接,用以在所述分析单元判定所述三维坐标模型发生定位异常的条件下发出预警提示。
7、进一步地,所述图像采集模块采集的装配组件的点云数据包括扫描点对应的三维空间坐标。
8、进一步地,所述建模单元还用以获取各局部模型中的各点的点云数据中的三维坐标数据,并计算各点的三维坐标数据的横坐标的方差、纵坐标的方差以及竖坐标的方差,并筛选方差的最大值。
9、进一步地,所述建模单元基于各局部模型的点云数据差异判定所述局部模型是否为特征局部模型,其中,
10、将所述方差的最大值与预设的方差阈值进行对比;
11、若所述方差的最大值大于方差阈值,则所述建模单元判定所述局部模型为特征局部模型。
12、进一步地,所述分析单元将所述特征局部模型与数据库内对应的标准模型进行对比,其中,
13、所述分析单元将所述特征局部模型的各点的点云数据的三维坐标数据与数据库内对应的标准模型的各点的点云数据的三维坐标数据进行对比,计算各点的横坐标差值、纵坐标差值以及竖坐标差值。
14、进一步地,所述分析单元确定各特征局部模型的异性量,其中,
15、所述分析单元基于所述特征局部模型各点的横坐标差值、纵坐标差值以及竖坐标差值筛选差值最大值,将所述差值最大值确定为所述特征局部模型的异性量。
16、进一步地,所述分析单元基于所述异性量筛选出表征性局部模型,其中,
17、将所述异性量与预设的异性阈量进行对比;
18、若所述异性量大于所述异性阈量,则所述分析单元将所述特征局部模型筛选为表征性局部模型。
19、进一步地,所述分析单元基于各所述表征性局部模型的异性量按公式(1)计算所述三维坐标模型的异性表征值,
20、
21、公式(1),e为异性表征值,ai为第i个表征性局部模型的异性量,n为表征性局部模型的数量,n为整数。
22、进一步地,所述分析单元基于所述异性表征值判定所述三维坐标模型是否发生定位异常,其中,
23、将所述异性表征值与预设的异性表征阈值进行对比,
24、若所述异性表征值大于所述异性表征阈值,则所述分析单元判定所述三维坐标模型发生定位异常。
25、进一步地,所述预警模块以文字以及声音发出预警提示。
26、与现有技术相比,本发明的有益效果在于,本发明通过设置图像采集模块、数据处理模块以及预警模块,通过建模单元构建装配组件的三维坐标模型,并划分为若干局部模型,基于各局部模型的点云数据差异判定特征局部模型,通过分析单元确定各特征局部模型的异性量,基于异性量筛选出表征性局部模型,基于各表征性局部模型的异性量计算三维坐标模型的异性表征值,基于异性表征值判定所述三维坐标模型是否发生定位异常,通过预警单元发出预警提示,进而,对建立的三维模型进行筛选出特征局部模型参与对比,并基于局部特征模型的差异表征整体的差异,避免了大量冗余数据参与对比计算,提高了定位系统的运行效率。
27、尤其,本发明通过建模单元判定特征局部模型,在实际情况中,电气设备的三维坐标模型中的各局部模型由于设备本体的不同,局部模型中各点的三维坐标差异量是不同的,通过计算各点在同一坐标轴方向上坐标值的差异程度判定此局部模型是否有特征性,比如,设备支架的拐角局部的坐标数据就是数据差异量比较大的区域,而支架的拐角这些结构对于支架定位是特别关键的,因此需要将这类局部模型对应的点云数据的信息进一步地获取,进而,避免了大量冗余数据参与对比计算,提高了定位系统的运行效率。
28、尤其,本发明通过分析单元确定各特征局部模型的异性量,并计算三维坐标模型的异性表征值,判定出三维坐标模型是否发生定位异常,在实际情况中,筛选出的局部模型的异性量可以准确地表征整体三维模型的异性量,可以表征性地确定出三维坐标模型发生定位异常,进而,避免了大量冗余数据参与对比计算,提高了定位系统的运行效率。
- 还没有人留言评论。精彩留言会获得点赞!