一种风电机组载荷估计传感器故障识别方法及系统与流程
本发明涉及风电机组传感器故障识别的,尤其是指一种风电机组载荷估计传感器故障识别方法及系统。
背景技术:
1、对于风电机组传感器故障识别,现有技术为针对传感器跳变、恒定输出等易于检测出的故障进行检测,或者采用多个传感器冗余的方法进行校验,但存在以下问题:1.难以检测出传感器缓慢漂移,2.需要更高的成本进行校验。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出了一种风电机组载荷估计传感器故障识别方法及系统,通过基于模型的载荷估计算法,在不增加任何成本的前提下,可以快速准确的检测出所有的传感器异常,极大的提高了机组的安全性。
2、本发明的目的通过下述技术方案实现:一种风电机组载荷估计传感器故障识别方法,包括以下步骤:
3、s1、基于叶素动量定理搭建叶片载荷模型,通过迭代计算直至收敛,计算出诱导因子,将诱导因子输入到叶片载荷模型中,计算每个叶素受到的推力和转矩;
4、s2、建立旋转轮毂坐标系下的叶根载荷模型,结合步骤s1得到的每个叶素受到的推力和转矩以及重力因素,计算出各叶片的叶根估计载荷;
5、s3、获取各叶片的叶根测量载荷,将叶根估计载荷与叶根测量载荷进行滤波的预处理;
6、s4、将预处理后的叶根估计载荷和测量载荷做差,若其差值的绝对值大于预设的阈值,则识别为载荷估计传感器故障;若其差值的绝对值小于预设的阈值,则识别为载荷估计传感器正常运行。
7、进一步,所述步骤s1包括:
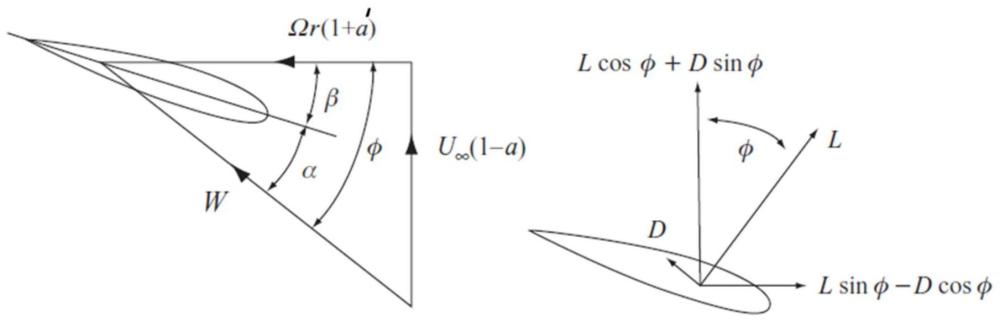
8、叶片的相对合速度如下:
9、
10、其中,w为相对合速度,u∞为无穷远处来流风速,a为轴向诱导因子,也称入流因子,a'为切向诱导因子,r为半径,ω为叶片旋转角速度;
11、入流角为φ,因此:
12、
13、
14、攻角α=φ-β;
15、其中,β为桨距角;
16、每个叶片在顺翼展方向长度为δr;
17、升力其方向垂直于w;
18、阻力其方向平行于w;
19、其中,ρ为空气密度,cl为升力系数,cd为阻力系数,c为弦长;
20、推力
21、环形扭矩
22、其中,b是叶片数量,c为弦长;
23、预设通过领域圆环的气流之间不发生径向相互作用,流经叶素的入流风速由来流风速和叶轮旋转速度合成为入流速度,入流角度可以根据三角函数关系计算得到如下公式:
24、
25、其中,φ为入流角,u∞是无穷远处来流风速,a为轴向诱导因子,也称入流因子,a'为切向诱导因子,ω是风轮转速,r是叶素到轮毂中心的距离,λr是叶素处的转速与来流风速之比;
26、根据叶素理论,叶素受到的推力和转矩为:
27、推力
28、转矩
29、根据动量定理,叶素受到的推力和转矩为
30、δt=2ρadu∞2a(1-a)=2ρ(2πrδr)u∞2a(1-a)=4πrρu∞2(1-a)aδr;
31、δq=ρu∞(1-a)ad2a'ωr2=ρu∞(1-a)(2πrδr)2a'ωr2=4πr3ρu∞ω(1-a)a'δr;
32、将叶素理论和动量定理相结合:
33、
34、
35、化简为
36、
37、
38、其中,
39、
40、令
41、c1 cosφ+cd sinφ=cx;
42、c1 sinφ-cd cosφ=cy;
43、解上述cx与cy两个方程,通过迭代计算,设置轴向诱导因子a和切向诱导因子a'初值为0,反复迭代直至收敛,即解出两个诱导因子;
44、迭代方程如下:
45、
46、
47、其中,为叶尖损失因子,为弦长实度定义为给定半径下的总叶片弦长除以该半径的周长;
48、迭代计算诱导因子会将轴向和切向诱导因子初始化为0,根据上式,采用迭代的方法,计算出轴向诱导因子和切向诱导因子。
49、进一步,所述步骤s2包括:
50、计算重力矩如下:
51、mxgravity=mbladegl90°sinθ
52、其中,mblade为叶片质量,l90°为叶片方位角为90°时的叶根到质心的长度,g为重力加速度,θ为叶轮方位角;
53、计算气动矩如下:
54、
55、
56、其中,i为叶片截面的顺序,n为叶片截面总数;
57、因此,旋转轮毂坐标系叶根摆振为:
58、mx=mxgravity+mxareo;
59、叶片挥舞方向的载荷主要是由于气动推力导致:
60、
61、旋转轮毂坐标系叶根挥舞为:
62、
63、其中,i为叶片截面的顺序,n为叶片截面总数,ri为第i个叶片截面到叶根的距离;
64、从bladed中获取翼型、气动扭矩、弦长、叶素至叶根的距离以及风速估计作为输入,代入到上述公式中估计出每只叶根所受的载荷;
65、通过以下评价指标来判断估计载荷是否准确:
66、mae:
67、rmse:
68、r2 score:
69、其中,y为实际载荷,为估计载荷,为实际载荷平均值,m为载荷数据个数,i为第i个载荷数据。
70、进一步,所述步骤s3包括:
71、获取各叶片的叶根测量载荷,将叶根估计载荷与叶根测量载荷进行移动平均滤波的预处理。
72、进一步,所述步骤s4包括:
73、将预处理后的叶根估计载荷和测量载荷做差,若其差值的绝对值大于预设的阈值,则识别为载荷估计传感器故障;若其差值的绝对值小于预设的阈值,则识别为载荷估计传感器正常运行;其中,所述预设的阈值为预处理后的叶根估计载荷的5%。
74、一种风电机组载荷估计传感器故障识别系统,用于实现上述风电机组载荷估计传感器故障识别方法,包括:
75、叶片载荷建模单元,基于叶素动量定理搭建叶片载荷模型,通过迭代计算直至收敛,计算出诱导因子,将诱导因子输入到叶片载荷模型中,计算每个叶素受到的推力和转矩;
76、叶根载荷建模单元,用于建立旋转轮毂坐标系下的叶根载荷模型,结合每个叶素受到的推力和转矩以及重力因素,计算出各叶片的叶根估计载荷;
77、预处理单元,用于获取各叶片的叶根测量载荷,将叶根估计载荷与叶根测量载荷进行滤波的预处理;
78、识别单元,将预处理后的叶根估计载荷和测量载荷做差,若其差值的绝对值大于预设的阈值,则识别为载荷估计传感器故障;若其差值的绝对值小于预设的阈值,则识别为载荷估计传感器正常运行。
79、进一步,所述叶根载荷建模单元包括:
80、叶片的相对合速度如下:
81、
82、其中,w为相对合速度,u∞为无穷远处来流风速,a为轴向诱导因子,也称入流因子,a'为切向诱导因子,r为半径,ω为叶片旋转角速度;
83、入流角为φ,因此:
84、
85、
86、攻角α=φ-β;
87、其中,β为桨距角;
88、每个叶片在顺翼展方向长度为δr;
89、升力其方向垂直于w;
90、阻力其方向平行于w;
91、其中,ρ为空气密度,cl为升力系数,cd为阻力系数,c为弦长;
92、推力
93、环形扭矩
94、其中,b是叶片数量,c为弦长;
95、预设通过领域圆环的气流之间不发生径向相互作用,流经叶素的入流风速由来流风速和叶轮旋转速度合成为入流速度,入流角度可以根据三角函数关系计算得到如下公式:
96、
97、其中,φ为入流角,u∞是无穷远处来流风速,a为轴向诱导因子,也称入流因子,a'为切向诱导因子,ω是风轮转速,r是叶素到轮毂中心的距离,λr是叶素处的转速与来流风速之比;
98、根据叶素理论,叶素受到的推力和转矩为:
99、推力
100、转矩
101、根据动量定理,叶素受到的推力和转矩为
102、δt=2ρadu∞2a(1-a)=2ρ(2πrδr)u∞2a(1-a)=4πrρu∞2(1-a)aδr;
103、δq=ρu∞(1-a)ad2a'ωr2=ρu∞(1-a)(2πrδr)2a'ωr2=4πr3ρu∞ω(1-a)a'δr;
104、将叶素理论和动量定理相结合:
105、
106、
107、化简为
108、
109、
110、其中,
111、
112、令
113、c1 cosφ+cd sinφ=cx;
114、c1 sinφ-cd cosφ=cy;
115、解上述cx与cy两个方程,通过迭代计算,设置轴向诱导因子a和切向诱导因子a'初值为0,反复迭代直至收敛,即解出两个诱导因子;
116、迭代方程如下:
117、
118、
119、其中,为叶尖损失因子,为弦长实度定义为给定半径下的总叶片弦长除以该半径的周长;
120、迭代计算诱导因子会将轴向和切向诱导因子初始化为0,根据上式,采用迭代的方法,计算出轴向诱导因子和切向诱导因子。
121、进一步,所述叶根载荷建模单元包括:
122、计算重力矩如下:
123、mxgravity=mbladegl90°sinθ
124、其中,mblade为叶片质量,l90°为叶片方位角为90°时的叶根到质心的长度,g为重力加速度,θ为叶轮方位角;
125、计算气动矩如下:
126、
127、
128、其中,i为叶片截面的顺序,n为叶片截面总数;
129、因此,旋转轮毂坐标系叶根摆振为:
130、mx=mxgravity+mxareo;
131、叶片挥舞方向的载荷主要是由于气动推力导致:
132、
133、旋转轮毂坐标系叶根挥舞为:
134、
135、其中,i为叶片截面的顺序,n为叶片截面总数,ri为第i个叶片截面到叶根的距离;
136、从bladed中获取翼型、气动扭矩、弦长、叶素至叶根的距离以及风速估计作为输入,代入到上述公式中估计出每只叶根所受的载荷;
137、通过以下评价指标来判断估计载荷是否准确:
138、mae:
139、rmse:
140、r2 score:
141、其中,y为实际载荷,为估计载荷,为实际载荷平均值,m为载荷数据个数,i为第i个载荷数据。
142、一种存储有指令的非暂时性计算机可读介质,当所述指令由处理器执行时,执行根据上述的风电机组载荷估计传感器故障识别方法的步骤。
143、一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述的风电机组载荷估计传感器故障识别方法。
144、本发明与现有技术相比,具有如下优点与有益效果:
145、1、本发明无需增加任何成本,在原有的硬件上即可实现;
146、2、本发明能够实现准确快速检测出传感器的固定偏差、缓慢漂移、跳变以及恒定输出故障。
- 还没有人留言评论。精彩留言会获得点赞!