一种与商用倒置显微镜兼容的棱镜式全内反射成像装置及其使用方法
本发明涉及一种与商用倒置显微镜兼容的棱镜式全内反射成像装置,属于光学显微成像领域,具体涉及一种与商用倒置显微镜兼容的棱镜式全内反射成像装置及其使用方法。
背景技术:
1、全内反射荧光显微镜是一种高精度的近场成像技术。当入射角超过一定角度,借由入射光从折射率大的区域进入折射率小的区域,在此材料的交界面譬如玻璃-水界面上,可产生入射光的全内反射,造成可穿透此界面的瞬逝波。瞬逝波的强度随离界面的距离指数衰减,其穿透深度通常只有数百纳米。因为穿透深度很小,所以瞬逝波只照明样品很薄的一层,使全内反射显微技术具有极高的成像信噪比。而又由于瞬逝波的指数衰减关系,结合荧光显微镜,通过监测瞬逝波照明范围内的荧光分子的荧光光强变化,我们可对近表面的待测物质乃至分子实现高精度的三维成像。由于上述特点,全内反射技术如今广泛应用于生命科学、材料科学和表面物理化学表征等领域,比如对蛋白质分子的运输过程进行观测。
2、目前,全内反射显微镜包括物镜型和棱镜型。物镜型全内反射显微镜中,激发和发射光路共用一条光路和物镜,信噪比偏低,且需用专用的高数值孔径物镜才能实现。成本高、光路复杂。更重要的是,这种方式产生全内反射需要依赖光路内部的角度控制部件,通常难以对全内反射产生的瞬逝波穿透深度实现定量化的控制,这使其无法准确获得待测物体的z向位置,只能用于对近表面的物体进行成像,而不能进行准确的三维定位。在棱镜型全内反射显微镜的设计中,激发光路和发射光路相互分离,背景光小于0.01%,具有极高的信噪比,可与各类物镜,包括空气物镜、水浸物镜、油浸物镜搭配使用,且成本较低,更重要的是棱镜型全内反射显微镜具有确定的瞬时波穿透深度,这是实现准确三维定位分析的前提。同时,棱镜型全内反射显微镜的搭建很灵活,有多种几何结构,可以兼容正置或倒置显微镜。
3、然而,棱镜型全内反射显微镜的设计仍旧存在以下问题:第一、不能与商用化倒置显微镜兼容。传统的棱镜式全内反射倒置显微镜需搭建一套完整的显微装置,无法与其他显微成像装置联用;第二、由于需在样品反射界面上添加棱镜,每次换样光路需重新进行调整一次光路,使用步骤极为复杂,阻碍了其进一步的推广应用。针对上述问题,本发明专利设计了一套独立于倒置显微镜的激发光路,使用棱镜式全内反射光路达到高信噪比,我们装置加载的载样台可直接安装在商用显微镜的样品台上。同时,该装置经初次校准全内反射角度后,更换新样品池不再需要调整光路,可获得具有高信噪比的图像并实现高精度的单分子三维定位和后续的轨迹分析。高精度的三维定位和分析功能在生命科学、材料科学和表面物理化学表征中具有重要意义。因此,本发明具有与商用倒置显微镜兼容、简便易用、高信噪比、可实现单分子的三维定位与动态行为表征的优势。
技术实现思路
1、为解决上述问题,本发明提出了一种与商用倒置显微镜兼容的棱镜式全内反射成像装置及其使用方法。本发明的主要目的在于解决搭建过程复杂、操作复杂、不兼容、成本高等问题,且同时保持全内反射光路的高信噪比优势,提供一种可兼容任一台倒置显微镜、搭建和操作简单、成本低、容易校准全内反射角同时又具有高信噪比的全内反射成像装置。该装置可安装至任意一台倒置显微镜,不干扰其他显微镜的功能模块,载样台可直接安装在倒置显微镜位移台上,初次校准全内反射角度后,只需更换样品池,不需要调整光路就可实现确定角度、高信噪比的全内反射成像。该装置优势在于良好的兼容性、高信噪比的图像获取、高精度的三维定位、搭建使用简便。提出了基本的全内反射显微镜单分子三维定位算法,以及表征单分子三维扩散轨迹、扩散行为、扩散系数,以及单分子相互作用的算法。
2、本发明解决其技术问题所采用的技术方案是:
3、一种与商用倒置显微镜兼容的棱镜式全内反射成像装置包括:激发光路和载样台;所述激发光路放置在水平基板上,所述载样台放置在倒置显微镜上,所述激发光路和载样台水平相距30-60cm,竖直方向相距20-40cm;
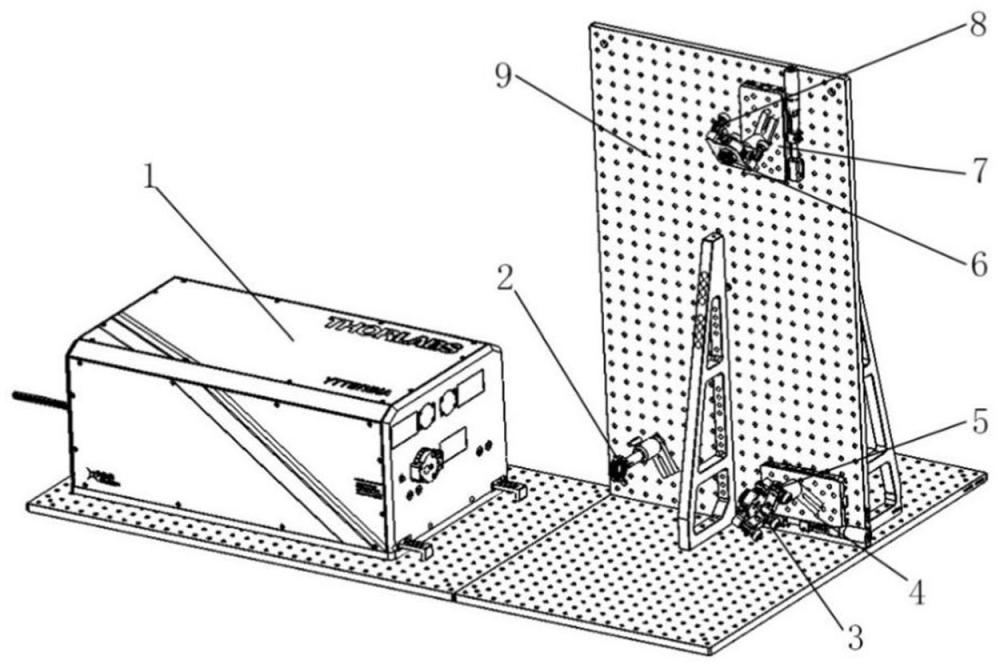
4、所述激发光路包括激光光源、光阑、第一反射镜、第一位移台、第一六轴光学调整架、第二反射镜、第二位移台、第二六轴光学调整架、立式基板;所述载样台包括棱镜、样品池、棱镜固定压块、样品固定压块、样品台;
5、所述激发光路放置于所述立式基板上;所述载样台放置于倒置显微镜上;所述光阑的一侧设置有激光光源,所述光阑的另一侧设置有第一反射镜、第一位移台、第一六轴光学调整架;所述第一反射镜上方设置有第二反射镜、第二位移台、第二六轴光学调整架;
6、所述样品台上方设置样品池;所述样品池上方设置棱镜;所述样品池下方设置物镜,用于放大信号;所述样品固定压块设置于样品池上方,用于固定压紧样品池;所述棱镜固定压块设置于棱镜上方,用于固定压紧棱镜。
7、在所述激发光路中,激光光源输出空间准直光束,所述光束通过光阑缩小光束直径,所述光束到达第一反射镜被反射为竖直向上的光束,所述向上光束到达第二反射镜被反射,方向朝向棱镜表面;
8、在载样台上,所述光束垂直入射棱镜,在样品池内发生全内反射现象,激发荧光物质发射荧光。
9、进一步地,在激发光路中,激光光源波长范围为100-2000nm,波长根据荧光染料的激发发射波长来确定。
10、进一步地,在激发光路中,光阑的中心安装高度要与激光光源出射光束中心保持一致,光阑的孔开到最小时,激光光源出射光垂直通过光阑孔,输出水平准直光束。
11、进一步地,在激发光路中,第一反射镜的中心高度和光阑的高度相等。
12、进一步地,在激发光路中,从光阑中心孔输出的水平准直光打在第一反射镜的中心,被倾斜的第一反射镜反射为竖直向上。
13、进一步地,在激发光路中,第一位移台固定在立式基板上,第一位移台只能沿着基板水平单轴移动;第一反射镜安装在第一六轴光学调整架上,可以进行俯仰和偏转的角度调节,第一六轴光学调整架安装在第一位移台上。
14、进一步地,在激发光路中,第二反射镜的中心在第一反射镜中心上方40到50cm处。
15、进一步地,在激发光路中,从第一反射镜反射出来的光打在第二反射镜中心,被第二反射镜反射,朝棱镜表面传播。
16、进一步地,在激发光路中,第二位移台固定在立式基板上,第二位移台只能沿着基板竖直单轴移动;第二反射镜安装在第二六轴光学调整架上,可以进行俯仰和偏转的角度调节,第二六轴光学调整架安装在第二位移台上。
17、进一步地,在载样台中,样品台是长10-100cm,宽10-100cm的表面镀漆铁板,可以吸附磁铁用于固定,中间开一个通孔用于放置物镜镜头,所述样品台安装在倒置显微镜上。
18、进一步地,在载样台中,物镜放大倍数为10-100倍,工作距离在0.2mm到10mm之间。
19、进一步地,在载样台中,棱镜固定压块用螺丝固定在样品台上。
20、进一步地,在载样台中,样品池由2片薄玻片和一片双面胶垫片组成,双面胶将2片玻片粘接在一起,样品池玻璃折射率范围:1.47-1.53,玻片厚度0.10-0.5mm,垫片厚度0.01-1mm。样品池水平方向距离第二反射镜中心30-80cm,竖直方向上距离第二反射镜中心20-60cm。
21、进一步地,在载样台中,入射光垂直入射棱镜表面,光入射至样品池上面玻璃片的下表面发生全内反射现象,激发靠近玻片的荧光分子。
22、进一步地,所述棱镜设计了一个布鲁斯特角,全内反射中被反射的光会进入布鲁斯特角结构不断全内反射,最后从布鲁斯特角处出射,不会干扰全内反射光路造成背景光。
23、进一步地,光路中棱镜角是固定的,所述棱镜角度为62°至85°之间(棱镜表面和底面的夹角,附图4进行了说明)。
24、进一步地,激发光路入射光照在棱镜表面被反射,在调节好入射光角度后(调节第一、第二六轴光学调整架),反射回来的光被第二反射镜、第一反射镜反射,原路返回至光阑中心,此时入射光是垂直入射棱镜表面;根据几何关系,全内反射角等于棱镜角度(棱镜表面和底面的夹角)。
25、一种与商用倒置显微镜兼容的棱镜式全内反射成像装置的使用方法,具体步骤如下:
26、步骤一)装样:将样品注射到所述样品池的腔室中,将样品池安装在棱镜下面,用所述样品固定压块固定样品池;
27、步骤二)打开激光产生全内反射光路:激发光通过所述光阑,然后被所述第一反射镜、第二反射镜反射至棱镜表面,被折射后传播至样品池上玻片下表面与样品界面处;此时全内反射角等于棱镜角,样品池上玻片下表面与样品界面处发生全内反射现象,产生的瞬逝波照亮附近荧光分子,相机接收信号,得到极高信噪比图像;
28、步骤三)定位追踪与分析:图像扣除背景平均光强,高斯拟合得到单分子质心点的xy方向位置,
29、进一步地,背景平均光强为视频所有帧光强的平均值,
30、进一步地,高斯拟合公式定义为下式:
31、
32、其中,i(x,y)是光强,a、δ、b是高斯拟合参数,x0和y0表示单分子坐标,
33、进一步地,提取距离质心点位置半径为d圆内的平均光强作为单分子光强i(h)(d根据单分子尺寸调整),利用i(h)随分离距离指数衰减公式计算z方向位置,
34、进一步地,具体地,公式如下:
35、i(h)=i0exp(-βh)
36、
37、其中,i0是追踪的单分子中的最大光强,具有最大光强的单分子所处的位置距离玻璃片表面最近,设置其z位置为零。i(h)是任意单分子的平均光强,h是距离零点的距离(即单分子的z位置),β是穿透深度的倒数。λ是入射光波长,θ是全内反射角度,n1和n2是玻璃和样品的折射率,
38、进一步地,根据每张图的x,y,z位置得到视野内每个分子连续的三维轨迹(上下两帧距离小于0.2-1.2μm可以连接成一个轨迹)。根据三维轨迹计算三维方向的均方末端距(mean square displacement,msd):
39、msd(δt)=<|r(t0+δt)-r(t0)|2>
40、其中,r(t0)和r(t0+δt)分别是t0和(t0+δt)时刻单分子的三维位置,
41、对每条具有至少100-500个点的轨迹进行拟合,公式如下:
42、msd(δt)=6dδtυ
43、其中,d为等效扩散因子,υ是msd指数,υ大于1时为主动运动,υ小于1时为受限运动,υ等于1时为扩散运动而此时的d为真实的扩散因子;此时可用einstein-stokes方程计算扩散系数,公式如下:
44、
45、其中,kb是玻尔兹曼常数,t是温度,η是流体剪切粘度,σ是分子直径,d是扩散系数,
46、进一步地,计算一段时间内每张图中处于一系列半径不断增大的同心球壳中的其他单分子的数量,计算描述单分子之间密度随距离变化的径向分布函数g(r),其定义为:
47、
48、其中,φ表示单分子半径r的球体范围内的局部密度,φ′表示系统中单分子的数量密度,其定义为:
49、
50、其中,n(r)是δr环中的单分子数。对于每个单分子周围的空间,统计处于一系列半径不断增大的同心球壳中的其他单分子的数量。当系统的浓度无限稀释时,g(r)可以通过波尔兹曼分布与相互作用能u(r)相关联。
51、u(r)=-kbtln[limn→0g(r)]
52、进一步地,由于无法无限稀释,我们可以在一系列梯度浓度下获得相应的表观势能uapp(r):
53、uapp(r)=-kbtlng(r)
54、其中,kb是玻尔兹曼常数,t是温度,得到uapp(r)后,通过数学拟合得到u(r)。
55、本发明与现有技术相比,本发明的技术方案的有益效果在于:
56、此发明采用棱镜式全内反射光路设计方案,保持了全内反射模式的高信噪比,搭建了独立于倒置显微镜的激发光路,载样台可直接安装在倒置显微镜位移台上,初次校准全内反射角度后,只需更换样品池,不需要调整光路就可实现确定角度、高信噪比的全内反射成像,可以兼容任一台倒置显微镜。此发明可以与其他显微镜同时观察,比如与数字全息显微镜联用;此发明结构简单,成本低;此发明的光线是直接由激光器出射的空间光,不需准直光源,操作简便且光线准直度高,定位结果更准确;此发明可以简单准确地校准全内反射角度,计算分子z轴位置精度高,还可以通过更换不同角度的棱镜实现不同角度的全内反射;此发明采用棱镜式全内反射模式,背景噪音是所有全内反射模式中最低的,具有极高的信噪比,能实现极高的定位精度;提出了基本的全内反射显微镜单分子三维定位算法,以及表征单分子三维扩散轨迹、扩散行为、扩散系数,以及单分子相互作用的算法。
- 还没有人留言评论。精彩留言会获得点赞!