一种基于线光谱共焦轮廓测量的样品高度获取方法及系统
本发明属于光学检测相关,更具体地,涉及一种基于线光谱共焦轮廓测量的样品高度获取方法及系统。
背景技术:
1、当今社会,高精度测量技术已经渗透到各行各业,成为促进科技进步和产业发展的重要驱动力。在半导体制造、医疗、科研等领域,对于非接触、大视场、高分辨、高速测量需求不断增长。
2、线光谱共焦轮廓测量传感器充分利用了光学共焦成像和光谱分析的优势,将传统的点光谱共焦扩展为线光谱共焦,通过光学色散原理建立距离与波长间的对应关系,利用光谱仪解码光谱信息获得待测样品表面形貌,在半导体、精密制造、3c电子、新能源、医疗等领域实现了对样件表面形貌的高精度快速测量。近年来,由于其具有自聚焦、测量范围大、测量范围广等优点,受到了广泛关注和应用。但由于其高速实时测量的特性,使得常常仅直接通过质心法进行峰值提取,从而造成峰值定位粗糙,影响了传感器的测量精度;另外,现有技术中测量样品精度极大依赖于峰值定位精度,峰值定位精度越高测量样品的精度就越高。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于线光谱共焦轮廓测量的样品高度获取方法及系统,解决样品高度检测精度低的问题。
2、为实现上述目的,按照本发明的一个方面,提供了一种基于线光谱共焦轮廓测量的样品高度获取方法,该方法包括下列步骤:
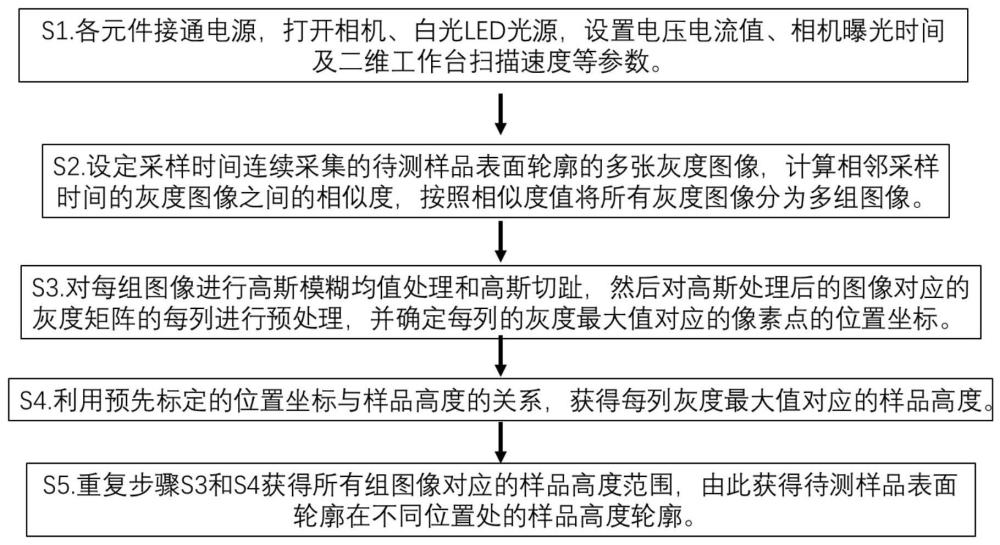
3、s1对于设定采样时间连续采集的待测样品表面轮廓的多张灰度图像,计算相邻采样时间的灰度图像之间的相似度,按照相似度值将所有灰度图像分为多组图像;
4、s2对每组图像进行高斯模糊均值处理和高斯切趾获得高斯处理后的图像,然后对高斯处理后的图像对应的灰度矩阵的每列进行预处理,由此获得该图像灰度矩阵中每列的灰度值与位置坐标之间的对应关系,并确定每列的灰度最大值对应的像素点的位置坐标;
5、s3利用已知的位置坐标与样品高度之间的关系,获得每列灰度最大值对应的样品高度,以此获得所述灰度矩阵每列对应的样品高度,由所有列对应的样品高度获得该组图像对应的样品高度轮廓;
6、s4重复步骤s2和s3获得所有组图像对应的样品高度轮廓,由此获得待测样品表面轮廓在不同位置处的样品高度轮廓。
7、进一步优选地,在步骤s2中,所述高斯模糊均值处理按照下列步骤进行:
8、s21将每组图像中的多幅图像划分为三个单元,分别为中间单元,第一单元和第三单元,第二单元为中间单元以前的图像,第三单元为中间单元以后的图像,中间单元中仅有一幅图像;
9、s22对第一单元和第三单元中的每幅图像进行高斯滤波;
10、s23对第一单元和第三单元中高斯滤波后的图像进行均值处理,以此分别获得第一单元和第三单元的高斯模糊均值后图像。
11、进一步优选地,在步骤s2中,所述高斯切趾处理按照下列方式进行:
12、i'=|i'2-(i'1+i'3)/2|
13、其中,i'是高斯切趾后的图像,i'1和i'3分别为第一单元和第三单元高斯模糊均值后的图像,i‘2是中间单元的图像。
14、进一步优选地,在步骤s22中,所述高斯滤波按照下列公式进行:
15、ga(x,y)=(1/(2πσ2))*exp(-((x2+y2)/(2σ2)))
16、其中,ga(x,y)是高斯滤波器在点(x,y)处的值,σ是控制高斯滤波器形状的参数,通常称为标准差,x和y分别是图像中点的坐标。
17、进一步优选地,在步骤s23中,所述均值处理是将第一单元或第三单元中的所有图像对应的高斯滤波值求平均值。
18、进一步优选地,在步骤s2中,所述预处理是对灰度图像进行降噪处理,降噪过程中按列提取灰度图像中的光谱数据,大于预设阈值的灰度值作为有效数据。
19、进一步优选地,在所述预处理过程中,当待测样品为对于透明多层介质时获得的灰度图像,还需将灰度图像中划分为多个光谱数据区间,然后将每个光谱数据区间作为一个灰度矩阵处理,分别获得每个灰度矩阵的每列灰度最大值与位置坐标的对应关系。
20、进一步优选地,在步骤s2中,所述灰度最大值采用质心平方算法计算获得。
21、进一步优选地,在步骤s1中,所述相似度的计算按照下列关系进行:
22、
23、其中,ssim(a,b)是a和b两幅图像的结构相似性指数,μa和μb是图像a和b的亮度的平均值,σa和σb是图像a和b的亮度的标准差,σab是图像a和b亮度之间的协方差,c1和c2是两个常数。
24、按照本发明的另一个方面,提供了一种上述所述的基于线光谱共焦轮廓测量的样品高度获取方法的测量系统,该系统包括图像采集模块、高斯模糊均值处理模块、高斯切趾模块、预处理模块和样品高度计算模块,其中,
25、所述图像采集模块用于采集待测样品的外轮廓灰度图像,并将采集的灰度图像分为多组图像;
26、所述高斯模糊均值处理模块用于多幅图像进行高斯模糊均值处理;
27、所述高斯切趾模块用于将高斯模糊均值处理后的图像进行高斯切趾处理;
28、所述预处理模块用于对图像进行降噪处理,同时获得灰度值与位置坐标的对应关系,并识别出灰度最大值;
29、所述样品高度计算模块用于将利用预先标定的位置坐标与样品高度的关系,获得灰度最大值对应的样品高度。
30、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
31、1.本发明中通过采用高斯模糊均值处理和高斯切趾的方式处理图像获得,减小轴向响应曲线的fwhm(半高峰宽),提高峰值定位精度,提升了系统的轴向分辨率,同时结合高斯模糊均值处理中的模糊滤波解决因实际加工误差、装配误差及环境因素等引起的系统信噪比低的问题;
32、2本发明针对批量测量待测样件的场景需求,采用对样件预处理的方式,调整cmos相机的幅面大小,使得通过质心平方算法提取峰值时,需要处理的数据量减少(cmos相机幅面减小使得所需算法处理像素减小),从而提升了三维形貌重建的速度。
技术特征:
1.一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,该方法包括下列步骤:
2.如权利要求1所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s2中,所述高斯模糊均值处理按照下列步骤进行:
3.如权利要求2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s2中,所述高斯切趾处理按照下列方式进行:
4.如权利要求2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s22中,所述高斯滤波按照下列公式进行:
5.如权利要求2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s23中,所述均值处理是将第一单元或第三单元中的所有图像对应的高斯滤波值求平均值。
6.如权利要求1或2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s2中,所述预处理是对灰度图像进行降噪处理,降噪过程中按列提取灰度图像中的光谱数据,大于预设阈值的灰度值作为有效数据。
7.如权利要求6所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在所述预处理过程中,当待测样品为对于透明多层介质时获得的灰度图像,还需将灰度图像中划分为多个光谱数据区间,然后将每个光谱数据区间作为一个灰度矩阵处理,分别获得每个灰度矩阵的每列灰度最大值与位置坐标的对应关系。
8.如权利要求1或2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s2中,所述灰度最大值采用质心平方算法计算获得。
9.如权利要求1或2所述的一种基于线光谱共焦轮廓测量的样品高度获取方法,其特征在于,在步骤s1中,所述相似度的计算按照下列关系进行:
10.一种权利要求1-9任一项所述的基于线光谱共焦轮廓测量的样品高度获取方法的测量系统,其特征在于,该系统包括图像采集模块、高斯模糊均值处理模块、高斯切趾模块、预处理模块和样品高度计算模块,其中,
技术总结
本发明属于光学精密测量相关技术领域,并公开了一种基于线光谱共焦轮廓测量的样品高度获取方法及系统。该方法包括下列步骤:S1采集待测样品表面轮廓的多张灰度图像,计算相邻采样时间的灰度图像之间的相似度并分多组;S2对每组图像进行高斯模糊均值处理和高斯切趾获得高斯处理后的图像,然后对高斯处理后的图像进行预处理获得灰度最大值对应的像素点的位置坐标;S3获取灰度最大值对应的样品高度,由所有列对应的样品高度获得该组图像对应的样品高度轮廓;S4重复步骤S2和S3获得所有组图像对应的样品高度轮廓,由此获得待测样品表面轮廓在不同位置处的样品高度轮廓。通过本发明,解决样品高度检测精度低的问题。
技术研发人员:王帅,韩昊轩,刘晓军
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!