一种用于两轮车的车速估计方法
本发明涉及车速估计领域,尤其涉及一种用于两轮车的车速估计方法。
背景技术:
1、在现有技术中,两轮车大多是基于前后两轮的轮速估计车速。然而,在紧急刹车触发车辆abs时,或是在低附着路面,例如冰雪、对开以及对接等路面,车轮打滑情况严重,使用轮速估计车速并不可靠。同时,若车把手发生轻微的转动,尤其在弯道转弯工况中,车轮和车身会产生侧偏角,也会造成车速估计不准确的问题,使得两轮机动车的车速估计成为车辆状态估计的难点。
技术实现思路
1、为了在触发车辆abs时、车轮打滑时或者车轮和车身产生侧偏角时,能准确估算出两轮机动车的车速,本发明提出了一种用于两轮车的车速估计方法,包括步骤:
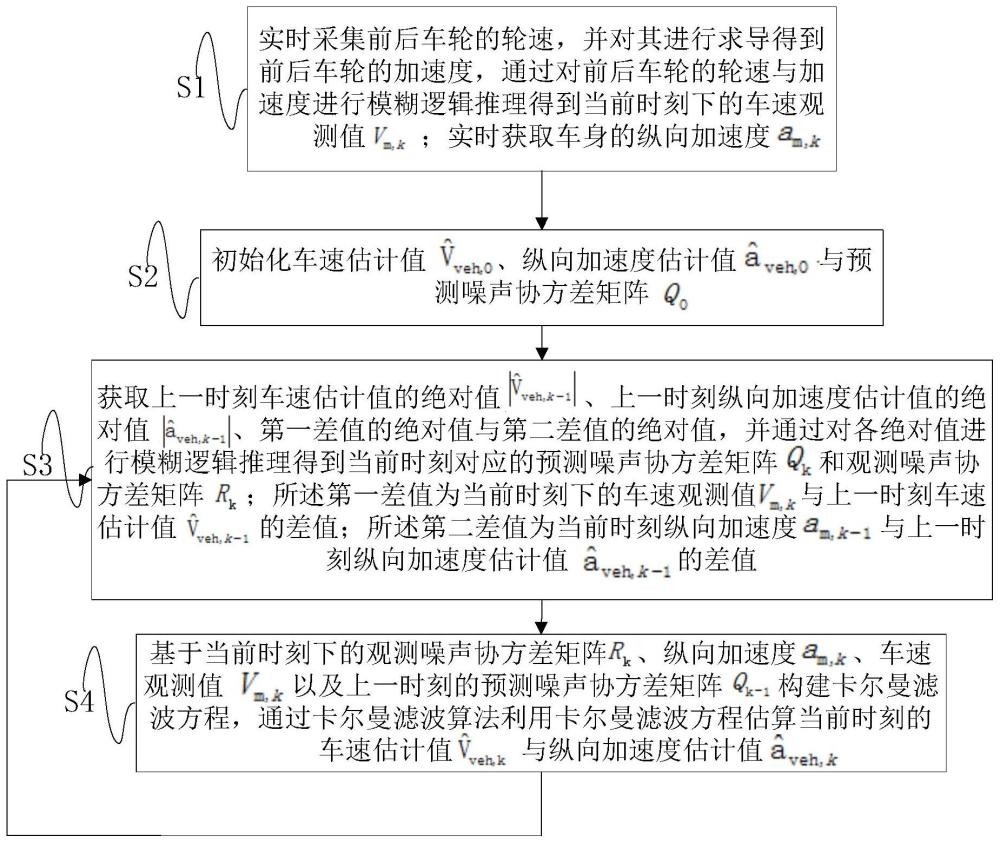
2、s1:实时采集前后车轮的轮速,并对其进行求导得到前后车轮的加速度,通过对前后车轮的轮速与加速度进行模糊逻辑推理得到当前时刻下的车速观测值vm,k;实时获取车身的纵向加速度am,k;其中,k表示当前时刻;
3、s2:初始化车速估计值纵向加速度估计值与预测噪声协方差矩阵q0;
4、s3:获取上一时刻车速估计值的绝对值上一时刻纵向加速度估计值的绝对值第一差值的绝对值与第二差值的绝对值,并通过对各绝对值进行模糊逻辑推理得到当前时刻对应的预测噪声协方差矩阵qk和观测噪声协方差矩阵rk;所述第一差值为当前时刻下的车速观测值vm,k与上一时刻车速估计值的差值;所述第二差值为当前时刻纵向加速度am,k-1与上一时刻纵向加速度估计值的差值;
5、s4:基于当前时刻下的观测噪声协方差矩阵rk、纵向加速度am,k、车速观测值vm,k以及上一时刻的预测噪声协方差矩阵qk-1构建卡尔曼滤波方程,通过卡尔曼滤波算法利用卡尔曼滤波方程估算当前时刻的车速估计值与纵向加速度估计值并返回s3步骤。
6、进一步地,所述卡尔曼滤波方程的公式表达式为:
7、
8、其中:
9、
10、ωk-1~n(0,qk-1)、rk~n(0,rk);
11、
12、式中,a表示状态转移矩阵,h表示观测矩阵,td表示离散步长,vm,k表示当前时刻下的车速观测值,am,k表示当前时刻下的纵向加速度,zk表示观测变量,vveh,k车速状态变量,aveh,k纵向加速度状态变量,xk表示状态变量,qv,k-1表示上一时刻的预测噪声协方差,qk-1表示上一时刻的预测噪声协方差矩阵,rv,k表示车速观测噪声协方差,ra,k表示纵向加速度观测噪声协方差,rk表示观测噪声协方差矩阵,ωk-1表示过程噪声,rk表示观测噪声。
13、进一步地,所述s4步骤中,通过卡尔曼滤波算法利用卡尔曼滤波方程估算当前时刻的车速估计值与纵向加速度估计值具体包括:
14、s41:根据上一时刻的状态变量后验估计值计算当前时刻的状态变量先验估计值根据上一时刻后验后的状态变量协方差矩阵pk-1与上一时刻的预测噪声协方差矩阵qk-1,计算当前时刻的状态变量协方差矩阵先验值
15、s42:根据当前时刻的状态变量协方差矩阵先验值与观测噪声协方差矩阵rk计算当前时刻的卡尔曼增益kk;
16、s43:获取当前时刻的观测变量zk,根据当前时刻的状态变量先验估计值卡尔曼增益kk与观测变量zk计算当前时刻的状态变量后验估计值通过当前时刻的状态变量协方差矩阵先验值卡尔曼增益kk计算后验后的状态变量协方差矩阵pk,并返回s3步骤;所述状态变量后验估计值中包含当前时刻下的车速估计值与纵向加速度估计值
17、进一步地,所述s2步骤还包括:
18、初始化后验后的状态变量协方差矩阵p0与状态变量后验估计值
19、进一步地,所述s41步骤中:
20、所述状态变量先验估计值的计算公式为:
21、所述状态变量协方差矩阵先验值计算公式为:
22、进一步地,所述s42步骤中:卡尔曼增益kk的计算公式为:
23、进一步地,所述s43步骤中:
24、所述状态变量后验估计值的计算公式为:
25、所述状态变量协方差矩阵pk的计算公式为:
26、与现有技术相比,本发明至少含有以下有益效果:
27、(1)本发明通过对前后车轮的轮速与加速度进行模糊逻辑推理得到当前时刻下的车速观测值vm,k;并实时获取车身的纵向加速度am,k;初始化车速估计值纵向加速度估计值与预测噪声协方差矩阵q0;获取上一时刻车速估计值的绝对值上一时刻纵向加速度估计值的绝对值第一差值的绝对值与第二差值的绝对值,并通过对各绝对值进行模糊逻辑推理得到当前时刻对应的预测噪声协方差矩阵qk和观测噪声协方差矩阵rk,基于当前时刻下的观测噪声协方差矩阵rk、纵向加速度am,k、车速观测值vm,k以及上一时刻的预测噪声协方差矩阵qk-1构建卡尔曼滤波方程,通过卡尔曼滤波算法利用卡尔曼滤波方程估算当前时刻的车速估计值与纵向加速度估计值即本发明基于根据实时的纵向加速度以及通过前后车轮的轮速与加速度计算得到的vm,k,计算出时变的预测噪声协方差矩阵和观测噪声协方差矩阵,通过时变的协方差矩阵实时并准确的估算当前时刻下的车速估计值与纵向加速度估计值,解决了在触发车辆abs时、车轮打滑时或者车轮和车身产生侧偏角时,不能准确估算出两轮机动车的车速的问题;
28、(2)由于采用轮速编码器测量的轮速不能直接代表车速,并且目前并没有其他可以直接测量车速的经济型传感器,因此本发明通过第一个模糊推理获取一个较为准确的车速观测值,提高了车速估算的准确性;
29、(3)传统的卡尔曼滤波中预测噪声协方差矩阵和观测噪声协方差矩阵取的是定值,本发明通过模糊逻辑实时计算这两个参数,使得q与r时变,极大的提高了估算的准确性。
技术特征:
1.一种用于两轮车的车速估计方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种用于两轮车的车速估计方法,其特征在于,所述卡尔曼滤波方程的公式表达式为:
3.根据权利要求2所述的一种用于两轮车的车速估计方法,其特征在于,所述s4步骤中,通过卡尔曼滤波算法利用卡尔曼滤波方程估算当前时刻的车速估计值与纵向加速度估计值具体包括:
4.根据权利要求3所述的一种用于两轮车的车速估计方法,其特征在于,所述s2步骤还包括:
5.根据权利要求4所述的一种用于两轮车的车速估计方法,其特征在于,所述s41步骤中:
6.根据权利要求5所述的一种用于两轮车的车速估计方法,其特征在于,所述s42步骤中:卡尔曼增益kk的计算公式为:
7.根据权利要求5所述的一种用于两轮车的车速估计方法,其特征在于,所述s43步骤中:
技术总结
本发明公开了一种用于两轮车的车速估计方法,其通过获取当前时刻下的车速观测值,并实时获取车身的纵向加速度;获取上一时刻的车速估计值与纵向加速度估计值以及第一差值与第二差值的绝对值,并通过对各绝对值进行模糊逻辑推理得到当前时刻对应的预测噪声协方差矩阵和观测噪声协方差矩阵,基于当前时刻下的观测噪声协方差矩阵、纵向加速度、车速观测值以及上一时刻的预测噪声协方差矩阵构建卡尔曼滤波方程,利用卡尔曼滤波方程估算当前时刻的车速估计值与纵向加速度估计值,即本发明通过计算出时变的预测噪声协方差矩阵和观测噪声协方差矩阵,估算当前时刻下的车速估计值与纵向加速度估计值,提高了估算的准确性。
技术研发人员:夏庆超,于雅雯,金波,单东升,陈赞
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!