雷达监测目标识别方法、装置、计算机设备及存储介质与流程
本发明涉及雷达信号处理领域,特别是涉及一种雷达监测目标识别方法、装置、计算机设备及存储介质。
背景技术:
1、毫米波雷达因其系统结构简单、体积小、重量轻以及可以满足全天候工作等特点,正在逐步应用于道路交通辅助监测领域,其具有对路面多目标实时跟踪、车流量统计、超速检测等诸多功能,为数智化交通系统提供技术支持与数据支撑。
2、在多目标实时跟踪的应用场景中,毫米波雷达在每个信号监测时间点会生成一帧雷达监测图,雷达监测图中具有由监测目标产生的正常数据点以及由噪声产生的噪声数据点。正常数据点一般情况下会聚集形成若干个聚落,聚落的数量即监测目标的数量,监测目标的中心即聚落的中心,噪声数据点则分布在聚落的外缘。
3、一般情况下,噪声数据点的分布较为稀疏,通过数据点在雷达监测图中的分布密度可以粗略筛选出噪声数据点,因此当不同监测目标之间距离较远时,可以忽略噪声数据点的影响,对不同聚落进行明显区分,从而确定监测目标数量和其尺寸参数。
4、但是当不同监测目标之间距离很近时,不同聚落周边的噪声点会在一个很小的空间内聚集,由此不同聚落之间的噪声数据点密度骤升,此时不同聚落之间可能会由于噪声数据点产生连接,此时由于噪声数据点密度较大,因此难以通过分布密度对噪声数据点和正常数据点进行明显区分,导致不同聚落之间无法进行分割被误认为是一个较大的聚落,导致使雷达对检测目标的数量造成误判。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种雷达监测目标识别方法、装置、计算机设备及存储介质。
2、一种雷达监测目标识别方法,包括:
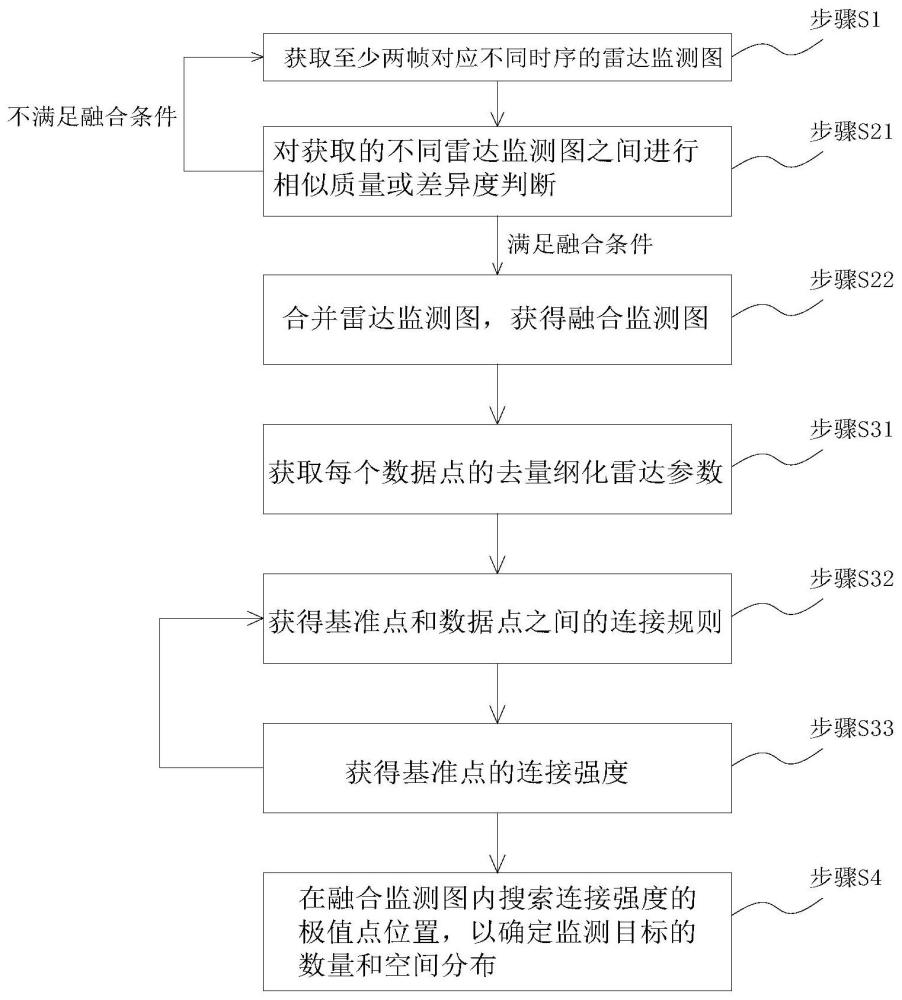
3、获取至少两帧对应不同时序的雷达监测图,所述雷达监测图中具有若干数据点;
4、从获取的所述雷达监测图中选取至少两帧进行合并,以获得融合监测图;
5、获取所述融合监测图中数据点对应的雷达参数,至少基于所述雷达参数获得所述融合监测图中数据点对应的连接强度;
6、在所述融合监测图内搜索连接强度的极值点位置,以确定监测目标的数量和空间分布。
7、本发明获取所述雷达监测图后,对所述雷达监测图进行网格化处理,确定所述雷达监测图中数据点占据的网格数量和分布;
8、基于获取的所述雷达监测图中数据点占据的网格数量和分布,确定不同雷达监测图之间的相似质量或差异度;
9、预设融合条件,选择相似质量或差异度满足融合条件的至少两帧所述雷达监测图进行合并,以获得融合监测图。
10、本发明对第f帧雷达监测图和第f+m帧雷达监测图进行比较,以获得第f帧雷达监测图和第f+m帧雷达监测图之间的相似质量sqf;
11、对第f+m帧雷达监测图和第f+2m帧雷达监测图进行比较,以获得第f+m帧雷达监测图和第f+2m帧雷达监测图之间的相似质量sqf+m;
12、至少基于sqf和sqf+m之间的比值,判断第f帧、第f+m帧和第f+2m帧雷达监测图是否满足融合条件;
13、当第f帧、第f+m帧和第f+2m帧雷达监测图满足融合条件时,对第f帧、第f+m帧和第f+2m帧雷达监测图进行合并,以获得融合监测图。
14、本发明至少基于所述雷达参数和雷达检测极限,获取去量纲化雷达参数;
15、在所述去量纲化雷达参数的空间中,选取其中一个数据点为基准点,至少基于所述基准点和其他所述数据点之间的加权欧氏距离,获得所述基准点和其他所述数据点之间的连接规则;
16、至少基于所述基准点和其他所述数据点之间的连接规则,获得所述基准点对应数据点的连接强度。
17、本发明所述基准点和所述数据点之间的加权欧氏距离为d,所述融合监测图中数据点的总数为n,所述基准点和所述数据点之间的连接规则fm∝exp(-d/2n2)。
18、本发明fm=exp(-d/2n2),雷达的监测范围为单向车道。
19、本发明连接强度的极值点搜索过程包括:
20、从所述融合监测图中随机选取数据点作为校验点;
21、基于校验点的位置以及监测目标的几何参数,在所述融合监测图中划分出校验区域,筛选出位于所述校验区域中的数据点;
22、将筛选得到的所述数据点和所述校验点进行连接强度比较,基于比较结果刷新校验点对应的数据点;
23、若校验点对应的数据点发生变化,则重复校验区域的划分、数据点的筛选以及连接强度比较过程,直至校验点对应的数据点不变;
24、当校验点对应的数据点不变时,此时校验点对应的数据点为连接强度的极值点。
25、一种雷达监测目标识别装置,包括:
26、第一图像获取模块,用于获取至少两帧对应不同时序的雷达监测图;
27、第一图像融合模块,用于对至少两帧对应不同时序的所述雷达监测图进行合并,以获得融合监测图;
28、第一计算模块,用于获取所述融合监测图中数据点对应的雷达参数,并至少基于所述雷达参数获得所述融合监测图中数据点对应的连接强度,以确定所述融合监测图中连接强度的极值点位置和极值点数量;
29、第一输出模块,用于根据所述连接强度的极值点位置和极值点数量输出监测目标的数量和空间分布。
30、一种雷达监测目标识别方法,包括:
31、获取雷达监测得到的至少两帧对应不同时序的数据流,所述数据流包括若干数据组,所述数据组具有空间坐标参数和雷达参数;
32、至少基于所述雷达参数获得所述数据组对应的连接强度;
33、在空间坐标系内确定连接强度的极值点位置,以确定监测目标的数量和空间分布。
34、本发明基于所述数据组内空间坐标参数确定所述数据组对应的空间网格;
35、对不同帧数据流中数据组对应的空间网格进行比较,以确定不同帧数据流之间的相似质量或差异度;
36、预设融合条件,从相似质量或差异度满足融合条件的至少两帧所述数据流中确定连接强度的极值点位置。
37、一种雷达监测目标识别装置,包括:
38、第一数据获取模块,用于获取雷达监测得到的至少两帧对应不同时序的数据流,所述数据流包括若干数据组,所述数据组具有空间坐标参数和雷达参数;
39、第二计算模块,用于至少通过雷达参数获得数据组对应的连接强度,并在空间坐标系内确定连接强度的极值点位置;
40、第二输出模块,用于输出监测目标的数量和空间分布。
41、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述的方法的步骤。
42、一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的方法的步骤。
43、本发明具有以下至少一个效果:
44、1.将不同帧雷达监测图合并形成融合监测图,使得融合监测图中数据点的数量相较单帧雷达监测图而言获得了极大提升,其中正常数据点的增加量远大于噪声数据点的增加量,由此融合监测图中正常数据点的分布密度增量高于噪声数据点的分布密度增量,有助于通过分布密度区分正常数据点和噪声数据点,由此当不同监测目标相距较近的时候,聚集群落之间可以进行粗略区分,降低监测目标数量误判情况的发生。
45、2.传统雷达监测图中监测目标的中心位置需要先进行噪声数据点和正常数据点的准确区分,然后再通过正常数据点形成的聚集群落的几何形状中心进行确定。该方法要求对噪声数据点进行高精度的识别,否则聚集群落的几何形状判断具有很高的不确定性。本发明基于雷达参数获得连接强度,然后基于连接强度的极值点位置确定监测目标的中心位置,不仅绕过了难度最大的针对噪声数据点进行精确识别过程,降低了对监测目标中心位置的识别难度,而且还绕过了具有很高结果不确定性的聚集群落几何形状判断,故而对本发明对监测目标中心位置的识别结果稳定性和准确都很高。
46、3.当监测目标距离较近的时候,利用噪声数据点的连接强度普遍低于监测目标中心位置处正常数据点的连接强度这一特性,通过采用连接强度极值点位置确定监测目标中心位置的方式,自动剔除了噪声数据点对监测目标中心位置识别过程的干扰,进一步提升了监测目标中心位置的识别准确性。
47、4.融合监测图中不同数据点的雷达参数由同一雷达采集获得,因此基于雷达参数获得连接强度的情况下,不同数据点的连接强度之间具有了更好的可比较性,由此减少对连接强度极值点位置误判情况的发生,从而更加准确地识别出监测目标的中心位置。
48、5.监测目标的体积有限,故而单帧雷达监测图中数据点的数量有限,且由于监测目标自身活动等原因,不同时序帧的雷达监测图中正常数据点并非始终对应监测目标的固定部位,故而对于单帧雷达监测图而言,其内部连接强度的极值点位置并不一定重合或者靠近监测目标的中心位置。而通过合并不同时序帧雷达监测图获得融合监测图,变相增加了对监测目标的监测数据点数量,使得连接强度的极值点位置更为靠近监测目标的中心位置,提升了连接强度的极值点位置为监测目标中心位置的概率。
- 还没有人留言评论。精彩留言会获得点赞!