雷达干扰信号识别方法、装置、计算机设备及存储介质与流程
本发明涉及雷达信号处理领域,特别是涉及一种雷达干扰信号识别方法、装置、计算机设备及存储介质。
背景技术:
1、毫米波雷达因其系统结构简单、体积小、重量轻以及可以满足全天候工作等特点,正在逐步应用于道路交通辅助监测领域,其具有对路面多目标实时跟踪、车流量统计、超速检测等诸多功能,为数智化交通系统提供技术支持与数据支撑。
2、在对车辆或其他监测目标进行监测的过程中,为了保证探测性能,一般会把雷达的性能调制成一个状态,满足雷达监测图对应监测目标所占据空间的位置会随机生成至少两个数据点,理论上,其中一个数据点对应于监测目标的中心或者靠近中心的部分,其余数据点则分布在该数据点的周围。基于这个特性,现阶段针对雷达监测图进行数据处理过程中,通常先采用聚类算法获取数据点形成的聚集群落的几何中心,然后找到最接近该几何中心位置的数据点,将该数据点所处的位置作为监测目标的中心位置。
3、上述监测目标的中心位置确定过程中,最重要的一环即雷达监测图中与监测目标对应的聚集群落的形状确定,聚集群落的形状确定越准确,则监测目标的中心位置识别准确度越高。而影响聚集群落形状确定的其中一个重要因素即干扰数据点的识别,干扰数据点以高斯分布的方式随机出现在整个雷达监测图中。一部分干扰数据点和监测目标所产生的数据点之间距离较远,因此通过计算数据点在空间上的分布密度,可以将这部分干扰数据点识别出来。但是,也有部分干扰数据点和监测目标所产生的数据点之间十分靠近,甚至混在一起,因此无法通过数据点的空间分布密度对这部分干扰数据点进行识别,在确定聚集群落形状的过程中,不可避免的会将这部分干扰数据点也作为聚集群落的一部分,导致聚集群落形状的判断失真,由此造成了监测目标的中心位置识别准确率降低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种雷达干扰信号识别方法、装置、计算机设备及存储介质。
2、一种雷达干扰信号识别方法,包括:
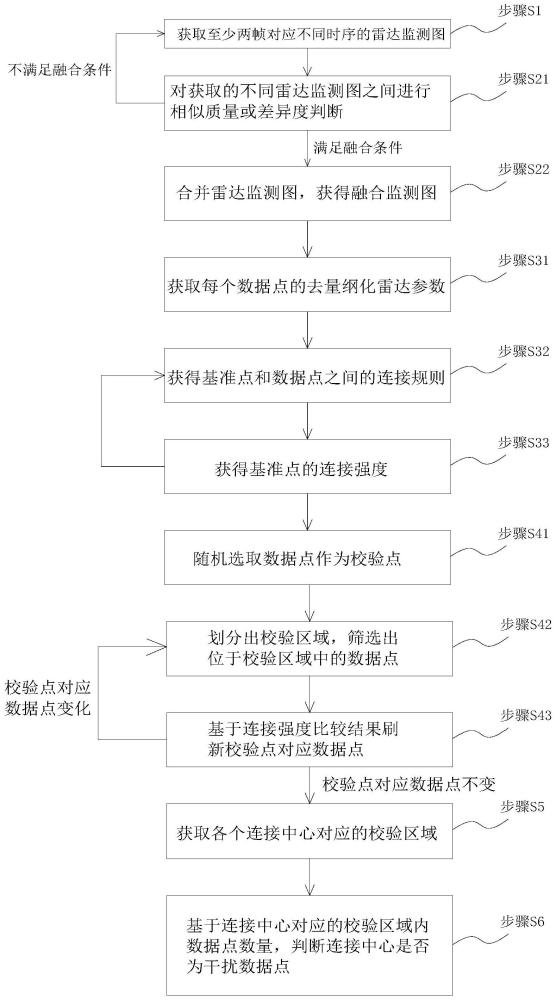
3、获取至少两帧对应不同时序的雷达监测图,所述雷达监测图中具有若干数据点;
4、从获取的所述雷达监测图中选取至少两帧进行合并,以获得融合监测图;
5、获取所述融合监测图中数据点对应的雷达参数,至少基于所述雷达参数获得所述融合监测图中数据点对应的连接强度;
6、在所述融合监测图内搜索连接强度极值点对应的数据点,以从所述融合监测图的数据点中筛选出连接中心;
7、至少基于监测目标的几何参数和所述连接中心的位置,从所述融合监测图中获取所述连接中心对应的校验区域;
8、基于所述连接中心对应的校验区域内数据点数量,判断所述连接中心是否为干扰数据点。
9、本发明所述连接中心为正常数据点时对应的校验区域为有效识别区域,基于所述有效识别区域和非连接中心的所述数据点之间的相对位置关系,判断非连接中心的所述数据点是否为干扰数据点。
10、本发明雷达的监测范围为车道,基于所述车道的方向、监测目标的几何参数和所述连接中心的位置,从所述融合监测图中获取所述连接中心对应的校验区域。
11、本发明至少基于所述雷达参数和雷达检测极限,获取去量纲化雷达参数;
12、在所述去量纲化雷达参数的空间中,选取其中一个数据点为基准点,至少基于所述基准点和其他所述数据点之间的加权欧氏距离,获得所述基准点和其他所述数据点之间的连接规则;
13、至少基于所述基准点和其他所述数据点之间的连接规则,获得所述基准点对应数据点的连接强度。
14、本发明所述基准点和所述数据点之间的加权欧氏距离为d,所述融合监测图中数据点的总数为n,所述基准点和所述数据点之间的连接规则fm=exp(-d/2n2)。
15、本发明获取所述雷达监测图后,对所述雷达监测图进行网格化处理,确定所述雷达监测图中数据点占据的网格数量和分布;
16、基于获取的所述雷达监测图中数据点占据的网格数量和分布,确定不同雷达监测图之间的相似质量或差异度;
17、预设融合条件,选择相似质量或差异度满足融合条件的至少两帧所述雷达监测图进行合并,以获得融合监测图。
18、本发明预设校验阈值κ,当所述连接中心对应的校验区域内数据点数量小于κ时,所述连接中心为干扰数据点,所述融合监测图通过合并τ帧雷达监测图获得,其中κ=φτ,φ为雷达监测系数。
19、一种雷达干扰信号识别装置,包括:
20、第一图像获取模块,用于获取至少两帧对应不同时序的雷达监测图;
21、第一图像融合模块,用于对至少两帧对应不同时序的雷达监测图进行合并,以获得融合监测图;
22、第一计算模块,用于获取所述融合监测图中数据点对应的雷达参数,并至少基于所述雷达参数获得所述融合监测图中数据点对应的连接强度,以从所述融合监测图的数据点中筛选出连接中心;
23、第一识别模块,至少基于监测目标的几何参数和所述连接中心的位置,从所述融合监测图中获取所述连接中心对应的校验区域,并基于所述连接中心对应的校验区域内数据点数量,判断所述连接中心是否为干扰数据点。
24、一种雷达干扰信号识别方法,包括:
25、获取雷达监测得到的至少两帧对应不同时序的数据流,所述数据流包括若干数据组,所述数据组具有空间坐标参数和雷达参数;
26、至少基于所述雷达参数获得所述数据组对应的连接强度;
27、在空间坐标系内连接强度极值点对应的数据组为中心数据组,至少基于监测目标的几何参数和所述中心数据组的空间坐标参数,确定所述中心数据组对应的校验空间范围;
28、获取所述校验空间范围对应的数据组数量,以判断所述中心数据组是否为干扰数据。
29、一种雷达干扰信号识别装置,包括:
30、第一数据获取模块,用于获取至少两帧对应不同时序的数据流,所述数据流包括若干数据组,所述数据组具有空间坐标参数和雷达参数;
31、第二计算模块,用于通过所述雷达参数获得所述数据组对应的连接强度,以从所述数据组中筛选获得连接强度极值点对应的中心数据组,并基于监测目标的几何参数和所述中心数据组的空间坐标参数,确定所述中心数据组对应的校验空间范围;
32、第二识别模块,用于获取所述校验空间范围对应的数据组数量,以判断所述中心数据组是否为干扰数据。
33、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述的方法的步骤。
34、一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的方法的步骤。
35、本发明具有以下至少一个效果:
36、1.通过合并雷达监测图获得融合监测图,使得正常数据点的数量获得显著增加,增加了监测目标中心产生的数据点在融合监测图中出现的概率,而后采用监测目标中心产生的数据点的连接强度在正常数据点形成的聚集群落中处于极大值这一特性,采用连接中心标定监测目标的中心位置,从而确定监测目标的数量和中心分布,避免了对聚集群落形状的判断,有效提升了监测目标的中心位置判断的准确度;
37、2.利用雷达监测图中干扰数据点数量少于正常数据点数量的这一特性,通过合并雷达监测图获得融合监测图,使得正常数据点的分布密度极大增加,而与正常数据点距离较远的干扰数据点分布密度少量增加,从而提升了正常数据点和干扰数据点的分布密度差距,从而有助于对远离监测目标的干扰数据点的识别;
38、3.利用干扰数据点分布密度相对稀疏的这一特性,结合具体应用场景和监测目标的几何参数划定校验区域,采用校验区域内数据点数量作为连接中心是否为干扰数据点的判断依据,避免干扰数据点连接强度偶发过大形成连接中心时被误认为监测目标中心,避免造成监测目标数量的误判,对靠近正常数据点的干扰数据点实现了精确识别;
39、4.监测目标中心位置的准确判断,无需确定正常数据点形成的聚集群落的具体形状,而是采用校验区域识别监测目标的占据空间,从而划定正常数据点可能出现范围,以对监测目标外侧的干扰数据点进行快速识别,提升了干扰数据点的识别速度。
- 还没有人留言评论。精彩留言会获得点赞!