基于LS-YOLO网络的遥感影像滑坡体检测方法
本发明属于图像处理,进一步涉及深度学习和数字图像处理技术,具体为一种基于ls-yolo网络的遥感影像滑坡体检测方法,其中涉及的滑坡目标检测网络ls-yolo(landslide-you only look once)是在现有单阶段目标检测网络yolov5基础上改进得到。本发明可用于光学遥感影像中滑坡的自动检测。
背景技术:
1、滑坡是山区最常见、破坏性最大的自然灾害之一,通常由地震或暴雨引发,严重威胁人民的生命财产安全和社会稳定。滑坡一旦发生不仅会破坏道路、桥梁和电线等基础设施,也会破坏植被和土壤,造成土地退化。精确、快速的定位滑坡发生的位置,将其告知相关部门对于灾害的预防、应对和救援至关重要。基于图像的滑坡目标检测技术依赖图像特征来判断是否存在滑坡,并定位滑坡所在的位置。随着遥感影像和深度学习技术的发展,将遥感影像批量的输入到深度学习模型中,模型使用训练好的权重可以自动的检测影像中的滑坡,提高了滑坡检测的准确率。
2、bo yu和chong xu等作者在其发表的论文“hadeennet:a hierarchical-attention multi-scaledeconvolution network for landslide detection”(international journal of applied earth observations and geoinformationpp.1569-8432,2022)中提出了一种基于hadeennet来检测遥感影像中滑坡的方法。然而,其中hadeennet将同一图像转换成两种不同分辨率的图像作为输入,包含了大量的卷积和反卷积操作,从而会导致网络参数量大,难以实时检测遥感影像中的滑坡,同时存在对不同尺寸的图像的滑坡检测能力不一,滑坡检测精度不足的问题。
3、杜宇峰和黄亮等作者在其发表的论文“基于detr的高分辨率遥感影像滑坡体识别与检测”(测绘通报2023年第5期16-20页)中提出了一种基于transformer的detr网络结构来检测遥感影像中滑坡的方法。该方法采用resnet-50网络对输入图片进行特征提取并输入transformer编解码器结构中进行训练,使用匈牙利匹配算法作为损失函数进行滑坡检测。刘学虎和欧鸥等作者在其发表的论文“融合注意力机制和空洞卷积的滑坡图像检测”(计算机与现代化2022年第4期45-51页)中提出了一种基于注意力机制cbam和空洞卷积的faster r-cnn算法检测遥感影像中的滑坡,首先使用resnet-50网络生成特征图并将其输入rpn模块生成候选区域,再一起输入到roi pooling层中生成候选区域特征图,最后使用全连接层进行softmax分类和bbox_pred候选区域位置回归,获得滑坡的位置。这两种方法虽然都在一定程度上提高了检测性能,但前者存在“同谱异物”的问题,易受裸地、矿场、云层等影响;后者涉及的faster r-cnn属于两阶段算法,在模型中需要生成大量的目标预选框;所以均会导致网络计算数据量大、训练时间成本高,模型检测速度慢,难以实时检测滑坡,并不能很好的应用到现实工业应用场景中。
技术实现思路
1、本发明目的在于针对上述现有技术的不足,提出一种基于ls-yolo网络的遥感影像滑坡体检测方法,用于解决遥感影像中滑坡的检测方法计算量大,检测多尺度滑坡的精度差、定位精度低,以及存在较多滑坡漏检和错检的问题。
2、本发明的技术思路是:针对滑坡的形状和尺寸在遥感影像中差异大的特点,首先基于有效通道注意力eca(efficient channel attention)、平均池化和空间可分离卷积设计多尺度特征提取模块;然后对现有的decoupled head进行改进,在decoupled head的回归任务分支中引入由不同空洞率的空洞卷积组成的上下文增强模块;最后在yolov5网络的neck中引入多尺度特征提取模块并使用改进后的decoupled head替换yolov5网络的head,对yolov5网络实现改进,得到改进后的用于检测的ls-yolo网络模型,利用该模型有效提升网络对遥感影像中滑坡的检测准确度。
3、本发明实现上述目的具体步骤如下:
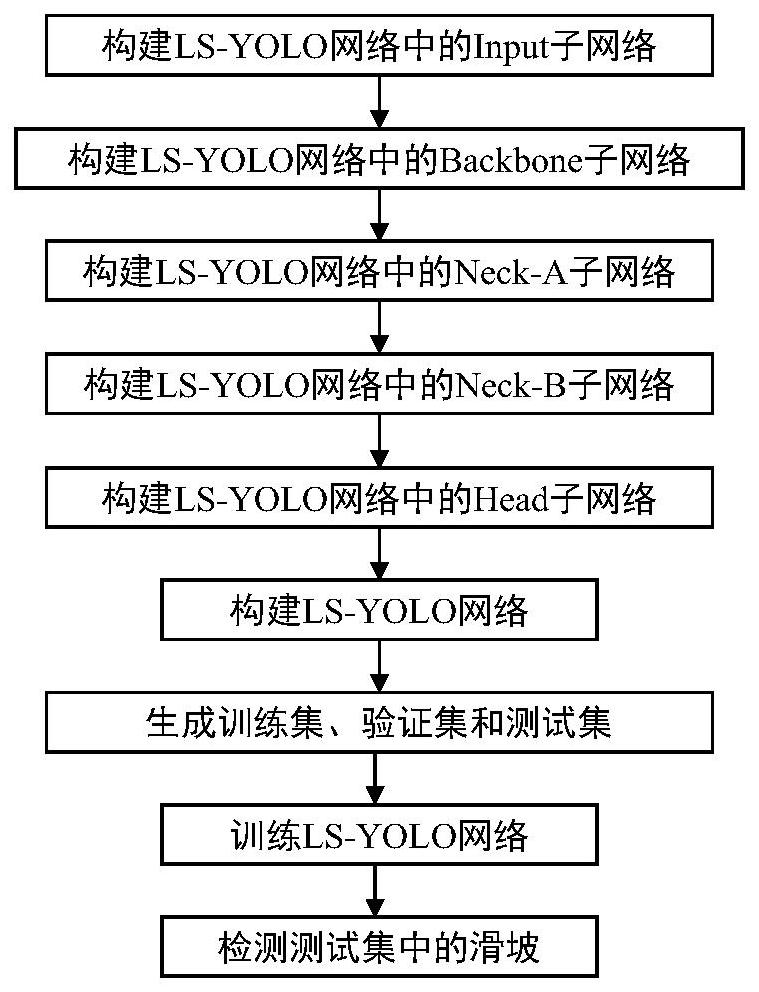
4、(1)构建由input子网络、backbone子网络、neck子网络和head子网络组成的滑坡目标检测ls-yolo网络模型:
5、(1.1)将现有单阶段目标检测yolov5网络中的输入网络和主干网络分别作为input子网络和backbone子网络;
6、(1.2)设计由neck-a和neck-b两部分网络构成的neck子网络:
7、(1.2.1)构建依次包括多尺度特征提取层、第一上采样层、第一拼接层、c3层、卷积层、第二上采样层和第二拼接层的neck-a网络;
8、(1.2.2)构建依次包括第一c3层、第一卷积层、第一拼接层、第二c3层、第二卷积层、第二拼接层和第三c3层的neck-b网络;
9、(1.2.3)将neck-a中的第二拼接层与neck-b中的第一c3层串联,将neck-a中的多尺度特征提取层与neck-b中的第二拼接层级联,将neck-a中的卷积层与neck-b中的第一拼接层级联,得到neck子网络;
10、(1.3)使用三个检测层并联组成head子网络,设置每个检测层的检测类别nc=1,且每个检测层均设置3个锚框尺寸,分别为{(10,13),(16,30),(33,23)},{(30,61),(62,45),(59,119)}和{(116,90),(156,198),(373,326)};所述检测层包含第一卷积层、第二卷积层、第一卷积模块层、上下文增强层、第二卷积模块层、第三卷积模块层以及拼接层;其中第二卷积层和第一卷积模块层组成分类任务分支,上下文增强层、第二卷积模块层和第三卷积模块层组成回归任务分支;第一卷积层的输出经过级联的分类任务分支和回归任务分支,拼接层将分类任务分支和回归任务分支的输出沿着通道方向拼接起来作为检测层的输出;
11、(1.4)将input子网络的增强层与backbone子网络的第一卷积层串联;
12、(1.5)将backbone子网络中的第二c3层和第三c3层分别与neck-a子网络中的第二拼接层和第一拼接层级联,将backbone子网络中的sppf层与neck-a子网络中的多尺度特征提取层串联;将neck-a中的卷积层与neck-b中的第一拼接层进行级联,将neck-a中的多尺度特征提取层与neck-b中的第二拼接层进行级联;
13、(1.6)将neck-b中的第一c3层、第二c3层和第三c3层分别与head子网络中的第一检测层、第二检测层和第三检测层级联;
14、(1.7)得到由input子网络、backbone子网络、neck子网络和head子网络组成的滑坡目标检测ls-yolo网络模型;
15、(2)收集包含滑坡的图像和不包含滑坡的图像组成多尺度滑坡数据集,并将该数据集划分为训练集、验证集和测试集;
16、(3)训练滑坡目标检测ls-yolo网络模型:
17、(3.1)设置训练参数batch-size为n,每次从训练集中随机且不重复的选择n张图像输入到网络模型中,权重参数文件使用yolov5s.pt,分类损失函数和置信度损失函数均使用二分类交叉熵损失函数;边界框损失函数使用ciou损失函数;
18、(3.2)将训练集和验证集依次输入到ls-yolo网络模型,使用图片自适应缩放算法对输入input子网络的图像的尺寸进行转换,并使用增强算法中的mosaic函数和mixup函数对图像进行增强;
19、(3.3)利用adam优化器和随机梯度下降法,迭代更新ls-yolo网络模型中的参数权值,然后在验证集上验证训练的效果,直到损失函数收敛为止,得到训练好的ls-yolo神经网络;
20、(4)检测测试集中的滑坡:
21、(4.1)将测试集数据输入到训练好的ls-yolo神经网络中,加载训练好的ls-yolo网络参数文件;
22、(4.2)对测试集中的图像进行滑坡检测,获得滑坡边界框的中心点位置、宽度、高度以及滑坡的置信度;
23、(4.3)输出滑坡检测结果并保存。
24、本发明与现有技术相比具有以下优点:
25、第一、由于本发明在构建检测模型时,基于eca、平均池化和空间可分离卷积设计了多尺度特征提取模块,并在yolov5网络的neck中引入了多尺度特征提取模块,使得网络模型提取多尺度滑坡特征的能力增强,从而提高了网络检测遥感影像中滑坡的精度。
26、第二、本发明在现有的decoupled head的回归任务分支上引入由不同空洞率的空洞卷积组成的上下文增强模块,并使用改进的decoupled head替换yolov5网络中的head部分,增大网络对滑坡的感受野,能够有效提高网络对多尺度滑坡的定位精度。
- 还没有人留言评论。精彩留言会获得点赞!