基于巡检机器人的仪表智能读数方法及系统
本发明涉及巡检机器人领域,具体为一种基于巡检机器人的仪表智能读数方法及系统。
背景技术:
1、随着工业自动化和智能化的快速发展,巡检机器人在工业生产和设施维护中扮演着重要角色。巡检机器人能够在工厂、仓库、发电厂等环境中执行巡检任务,收集关键的仪表数据以确保设备正常运行并及时发现潜在的故障。
2、传统的巡检方法主要以人工方式为主,主要是通过人工的观察、听觉和使用相关设备进行相关测试。该方法由于人为主观因素的影响不仅会导致检测结果的不稳定,而且通常厂区设备复杂、处于高温高压的危险环境,对工作人员安全造成一定程度的威胁。可以预见,传统的人工巡检的方式已经不能适应现阶段电力系统的高速发展,智能化无人值守电厂将成为未来的发展方向。替代人工实现全天候巡检、全自动定位、实时通讯、压力表、温度表和噪声自动采集等功能,在降低人工成本的同时提高了巡检工作的效率。因此,研发能够替代人工的机器人巡检技术具有重要的现实意义。
3、巡检机器人已成为工业领域的重要产品,为完成整个巡检任务需要多种技术的融合,包含诸多传感器的信息融合技术、自主导航与定位技术、智能控制技术、机器视觉技术以及网络通讯技术等。为保证工业生产设备的正常运行,采用各类仪表测量各项指标,从而监测设备状态,机器视觉技术在仪表识别扮演着重要角色,通过计算机视觉方法对机器人采集的仪表图像进行处理,最终计算仪表读数。诸多技术的应用将不断推动巡检机器人的迭代和发展,针对巡检机器人的智能仪表读数技术的研究具有重要的实用价值和意义。
4、传统巡检方式难以应对仪表类型多、分布广的挑战,需要建立固定轨道限制机器人移动范围。同时,人工操作图像采集存在准确性和效率低的问题,仪表读数依赖人工进行且存在人为误差和延迟。通过无轨化导航、智能图像采集与传输以及实时计算与监测,提高了巡检的灵活性、采集准确性和实时性。机器人能自由移动适应多种仪表,自动采集高质量图像,并实时计算仪表读数,提高巡检效率和准确性。可见,自动巡检在工业生产中具有更高效和优质的应用前景。
技术实现思路
1、针对现有技术中存在的问题,本发明提供一种基于巡检机器人的仪表智能读数方法及系统,该方法大大提高设备维护的效率和可靠性,降低操作员的工作负担。
2、本发明是通过以下技术方案来实现:
3、一种基于巡检机器人的仪表智能读数方法,包括以下步骤:
4、步骤1、根据巡检区域的图像以及巡检区域中各仪表位置,并结合自主导航方法,规划最优巡检路径;
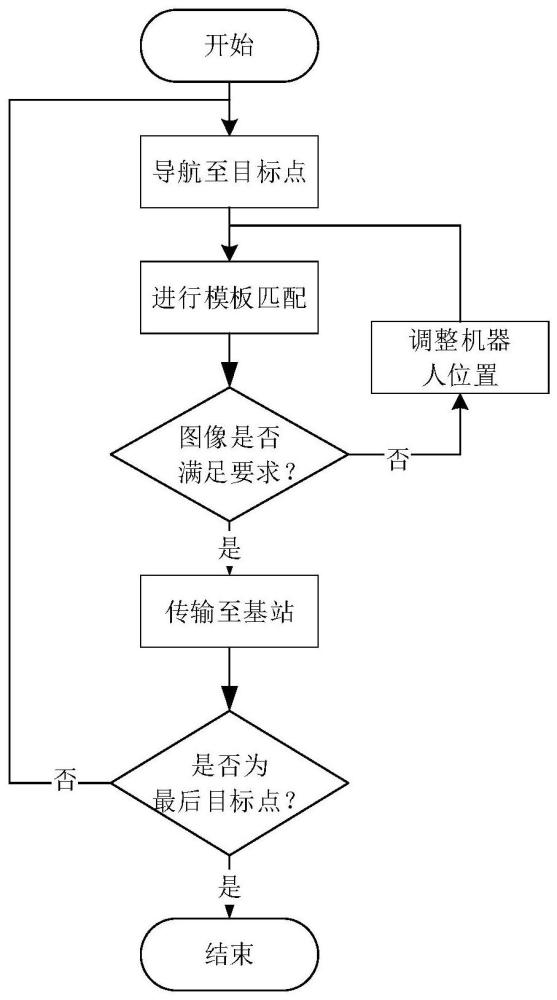
5、步骤2、巡检机器人根据最优巡检路径导航至各仪表位置,根据模板匹配算法调整机器人的姿态,获取清晰的仪表所在区域图像;
6、步骤3、基于目标检测网络模型提取仪表所在区域图像中的仪表图像;
7、步骤4、对仪表图像中的数值区域进行分割,根据分割的图像确定仪表的数值。
8、2.根据权利要求1所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,步骤1中所述规划最优巡检路径的方法如下:
9、根据巡检区域的图像以及对应图像的定位,采用基于视觉的rtabmap同步定位与建图算法,构建巡检区域的环境地图;
10、在环境地图中标注仪表位置点,并以巡检机器人的当前位置为初始节点,利用a*全局规划算法规划初始最优巡检路径;
11、采用局部dwa算法对路径进行平滑处理和路径优化,得到最优巡检路径。
12、优选的,步骤2中根据最优巡检路径生成导航指令,巡检机器人根据导航指令沿最优规划路径移动至各仪表位置,通过模板匹配算法计算模板图像和子图的匹配结果,根据匹配结果控制巡检机器人的姿态,以获取清晰度最优的仪表所在区域图像。
13、优选的,所述巡检机器人姿态的控制方法如下:
14、根据模板匹配结果确定仪表的中心,计算仪表的中心与巡检机器人的相机中心的误差,根据误差调整巡检机器人的姿态,使仪表的中心与相机的中心误差,以及仪表面积占视野面积比例小于设定范围。
15、优选的,步骤3中提取仪表图像的方法如下:
16、构建目标检测网络yolov4-tiny,并采用仪表图像训练集进行训练,根据训练后的目标检测网络yolov4-tiny获取仪表所在区域图像中的仪表图像。
17、优选的,步骤4中根据仪表的图像确定仪表的类型,仪表的类型包括数显式仪表和指针式仪表。
18、优选的,所述指针式仪表的数值确定方法如下:
19、采用u-net分割网络对仪表图像进行分割,得到指针图像和刻度盘图像,确定刻度盘的圆心,并根据圆心对刻度盘进行极坐标展开,将指针进行垂直投影,根据垂直投影结果的峰值确定指针位置,根据指针中心线与刻度盘按极坐标展开后的位置关系,确定指针式仪表的数值。
20、优选的,所述数显式仪表的数值确定方法如下:
21、采用投影法将数显区域分割出来,然后利用crnn网络对数显区域的字符串进行识别,得到数显式仪表的数值。
22、一种基于巡检机器人的仪表智能读数方法的系统,包括,
23、路径规划模块,用于根据巡检区域的图像以及巡检区域中各仪表位置,并结合自主导航方法,规划最优巡检路径;
24、区域图像采集模块,用于巡检机器人根据最优巡检路径导航至各仪表位置,根据模板匹配算法调整机器人的姿态,获取清晰的仪表所在区域图像;
25、仪表图像提取模块,用于基于目标检测网络模型提取仪表所在区域图像中的仪表图像;
26、识别模块,用于对仪表图像中的数值区域进行分割,根据分割的图像确定仪表的数值。
27、与现有技术相比,本发明具有以下有益的技术效果:
28、本发明公开了一种基于巡检机器人的仪表智能读数方法,根据巡检区域的环境图像以及仪表的位置对巡检机器人的巡检路径进行规划,使巡检机器人以最短的时间完成对各个仪表的巡查,在执行仪表巡检任务时,巡检机器人获取各个仪表所在区域的图像,然后通过目标检测网络模型获取图像中的仪表图像,在对仪表图像的数值区域进行分割,根据分割的图像确定仪表的数值,该方法采用无轨化导航技术,使巡检机器人能够自由移动并适应多种类型和分布广泛的工业仪表。相较于传统的固定轨道巡检方式,无轨化导航提供了更大的灵活性和适应性,能够有效应对复杂工厂环境中仪表分布的多样性。
技术特征:
1.一种基于巡检机器人的仪表智能读数方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,步骤1中所述规划最优巡检路径的方法如下:
3.根据权利要求1所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,步骤2中根据最优巡检路径生成导航指令,巡检机器人根据导航指令沿最优规划路径移动至各仪表位置,通过模板匹配算法计算模板图像和子图的匹配结果,根据匹配结果控制巡检机器人的姿态,以获取清晰度最优的仪表所在区域图像。
4.根据权利要求3所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,所述巡检机器人姿态的控制方法如下:
5.根据权利要求1所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,步骤3中提取仪表图像的方法如下:
6.根据权利要求1所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,步骤4中根据仪表的图像确定仪表的类型,仪表的类型包括数显式仪表和指针式仪表。
7.根据权利要求6所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,所述指针式仪表的数值确定方法如下:
8.根据权利要求6所述的一种基于巡检机器人的仪表智能读数方法,其特征在于,所述数显式仪表的数值确定方法如下:
9.一种实现权利要求1-8任一项所述基于巡检机器人的仪表智能读数方法的系统,其特征在于,包括,
技术总结
本发明公开了一种基于巡检机器人的仪表智能读数方法及系统,根据巡检区域的环境图像以及仪表的位置对巡检机器人的巡检路径进行规划,使巡检机器人以最短的时间完成对各个仪表的巡查,在执行仪表巡检任务时,巡检机器人获取各个仪表所在区域的图像,然后通过目标检测网络模型获取图像中的仪表图像,在对仪表图像的数值区域进行分割,根据分割的图像确定仪表的数值,该方法采用无轨化导航技术,使巡检机器人能够自由移动并适应多种类型和分布广泛的工业仪表。相较于传统的固定轨道巡检方式,无轨化导航提供了更大的灵活性和适应性,能够有效应对复杂工厂环境中仪表分布的多样性。
技术研发人员:辛菁,雷升,刘伟,焦尚彬,尚治龙,陈凯,任春彧,贾元成
受保护的技术使用者:西安理工大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!