管道气体泄漏的检测方法、装置、飞行设备及存储介质与流程
本技术涉及气体检测,尤其涉及一种管道气体泄漏的检测方法、装置、飞行设备及存储介质。
背景技术:
1、当下,管道气体(如燃气)的泄漏事故并不少见,为了对管道气体泄漏进行检测,通常需要对管道进行人工巡检,但管道数量较多且长度较长,人工巡检的方式极其浪费人力资源,因此,为了实现管道气体泄漏的自动化检测,通常需要在管道周围每隔一段距离安装气体检测仪,以在管道气体发生气体泄漏时,确定管道的泄漏位置,但由于成本问题,气体检测仪的安装密度不能太高,所以泄漏位置的检测准确性也较低。
技术实现思路
1、本技术实施例公开了一种管道气体泄漏的检测方法、装置、飞行设备及存储介质,能够提高泄漏位置的检测准确性。
2、本技术实施例公开了一种管道气体泄漏的检测方法,应用于飞行设备,所述飞行设备包括图像采集装置以及激光传感器,所述方法包括:
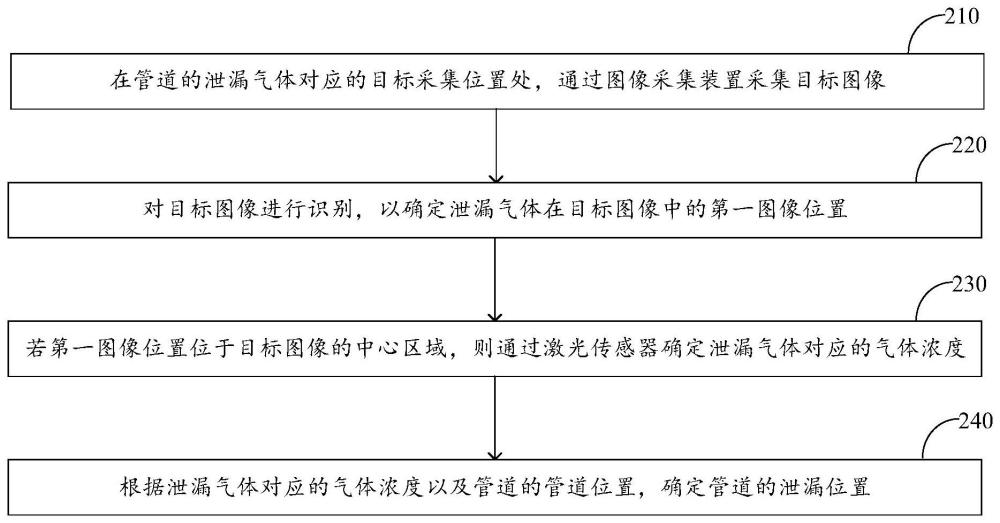
3、在管道的泄漏气体对应的目标采集位置处,通过所述图像采集装置采集目标图像;
4、对所述目标图像进行识别,以确定所述泄漏气体在所述目标图像中的第一图像位置;
5、若所述第一图像位置位于所述目标图像的中心区域,则通过所述激光传感器确定所述泄漏气体对应的气体浓度;
6、根据所述泄漏气体对应的气体浓度以及所述管道的管道位置,确定所述管道的泄漏位置。
7、在一个实施例中,在所述在管道的泄漏气体对应的目标采集位置处,通过所述图像采集装置采集目标图像之前,所述方法还包括:
8、在控制所述飞行设备按照管道位置进行移动的过程中,通过所述图像采集装置采集巡检图像;
9、若根据所述巡检图像检测到存在管道的泄漏气体,则控制所述飞行设备移动至所述泄漏气体对应的目标采集位置。
10、在一个实施例中,所述在控制所述飞行设备按照管道位置进行移动的过程中,通过所述图像采集装置采集巡检图像,包括:
11、在控制所述飞行设备按照管道位置进行移动的过程中,控制所述图像采集装置的采集方向为所述飞行设备的前方,通过所述图像采集装置采集巡检图像;
12、所述在管道的泄漏气体对应的目标采集位置处,通过所述图像采集装置采集目标图像,包括:
13、在管道的泄漏气体对应的目标采集位置处,控制所述图像采集装置的采集方向为向下且与地面垂直,通过所述图像采集装置采集目标图像;
14、所述通过所述激光传感器确定所述泄漏气体对应的气体浓度,包括:
15、控制所述激光传感器的采集方向向下且与为地面垂直,通过所述激光传感器确定所述泄漏气体对应的气体浓度。
16、在一个实施例中,所述控制所述飞行设备移动至所述泄漏气体对应的目标采集位置,包括:
17、确定所述泄漏气体在目标巡检图像中的第二图像位置;所述目标巡检图像为检测到存在所述泄漏气体的巡检图像;
18、根据所述第二图像位置以及所述飞行设备对应的设备位置,确定在所述泄漏气体的上方的目标采集位置;所述飞行设备对应的设备位置为所述图像采集装置采集到所述目标巡检图像时,所述飞行设备所处的位置;
19、控制所述飞行设备移动至所述目标采集位置。
20、在一个实施例中,所述根据所述第二图像位置以及所述飞行设备对应的设备位置,确定在所述泄漏气体的上方的目标采集位置,包括:
21、根据所述飞行设备对应的设备位置以及转换矩阵,对所述第二图像位置进行坐标转换,得到所述泄漏气体在世界坐标系中对应的气体位置;
22、根据所述气体位置进行三维形状预测,得到所述泄漏气体的三维形状;
23、根据所述泄漏气体的三维形状以及气体扩散模型,分析得到所述泄漏气体对应的至少一个扩散源位置;
24、确定所述至少一个扩散源位置在所述泄漏气体的上方分别对应的采集位置;
25、从所述至少一个扩散源位置分别对应的采集位置中,确定与所述设备位置最近的采集位置,作为目标采集位置。
26、在一个实施例中,所述方法还包括:
27、若所述第一图像位置不位于所述目标图像的中心区域,则根据所述第一图像位置以及所述飞行设备与所述目标采集位置,确定新的目标采集位置;
28、控制所述飞行设备移动至所述新的目标采集位置,并重新执行通过所述图像采集装置采集目标图像的步骤,直至所述泄漏气体在所述目标图像中的第一图像位置位于所述目标图像的中心区域。
29、在一个实施例中,所述通过所述激光传感器确定所述泄漏气体对应的气体浓度,包括:
30、通过所述激光传感器,确定所述泄漏气体在多个区域分别对应的气体浓度,所述多个区域是根据所述激光传感器的采集范围确定的;
31、在所述通过所述激光传感器,确定所述泄漏气体在多个区域分别对应的气体浓度之后,所述方法还包括:
32、根据各个所述区域分别对应的气体浓度以及对应的区域范围,确定泄漏气体总量;
33、根据所述泄漏气体总量,确定所述管道的泄漏程度。
34、本技术实施例公开了一种管道气体泄漏的检测装置,应用于飞行设备,所述飞行设备包括图像采集装置以及激光传感器,所述装置包括:
35、图像采集模块,用于在管道的泄漏气体对应的目标采集位置处,通过所述图像采集装置采集目标图像;
36、图像识别模块,用于对所述目标图像进行识别,以确定所述泄漏气体在所述目标图像中的第一图像位置;
37、浓度检测模块,用于若所述第一图像位置位于所述目标图像的中心区域,则通过所述激光传感器确定所述泄漏气体对应的气体浓度;
38、位置确定模块,用于根据所述泄漏气体对应的气体浓度以及所述管道的管道位置,确定所述管道的泄漏位置。
39、在一个实施例中,检测装置还包括管道巡检模块,用于在控制所述飞行设备按照管道位置进行移动的过程中,通过所述图像采集装置采集巡检图像;若根据所述巡检图像检测到存在管道的泄漏气体,则控制所述飞行设备移动至所述泄漏气体对应的目标采集位置。
40、在一个实施例中,所述管道巡检模块,还用于在控制所述飞行设备按照管道位置进行移动的过程中,控制所述图像采集装置的采集方向为所述飞行设备的前方,通过所述图像采集装置采集巡检图像;所述图像采集模块,还用于在管道的泄漏气体对应的目标采集位置处,控制所述图像采集装置的采集方向为向下且与地面垂直,通过所述图像采集装置采集目标图像;所述浓度检测模块,还用于控制所述激光传感器的采集方向为向下且与地面垂直,通过所述激光传感器确定所述泄漏气体对应的气体浓度。
41、在一个实施例中,所述管道巡检模块,还用于确定所述泄漏气体在目标巡检图像中的第二图像位置;所述目标巡检图像为检测到存在所述泄漏气体的巡检图像;根据所述第二图像位置以及所述飞行设备对应的设备位置,确定在所述泄漏气体的上方的目标采集位置;所述飞行设备对应的设备位置为所述图像采集装置采集到所述目标巡检图像时,所述飞行设备所处的位置;控制所述飞行设备移动至所述目标采集位置。
42、在一个实施例中,所述管道巡检模块,还用于根据所述飞行设备对应的设备位置以及转换矩阵,对所述第二图像位置进行坐标转换,得到所述泄漏气体在世界坐标系中对应的气体位置;根据所述气体位置进行三维形状预测,得到所述泄漏气体的三维形状;根据所述泄漏气体的三维形状以及气体扩散模型,分析得到所述泄漏气体对应的至少一个扩散源位置;确定所述至少一个扩散源位置在所述泄漏气体的上方分别对应的采集位置;从所述至少一个扩散源位置分别对应的采集位置中,确定与所述设备位置最近的采集位置,并作为目标采集位置。
43、在一个实施例中,所述图像采集模块,还用于若所述第一图像位置不位于所述目标图像的中心区域,则根据所述第一图像位置以及所述飞行设备与所述目标采集位置,确定新的目标采集位置;控制所述飞行设备移动至所述新的目标采集位置,并重新执行通过所述图像采集装置采集目标图像的步骤,直至所述泄漏气体在所述目标图像中的第一图像位置位于所述目标图像的中心区域。
44、在一个实施例中,所述浓度检测模块,还用于通过所述激光传感器,确定所述泄漏气体在多个区域分别对应的气体浓度,所述多个区域是根据所述激光传感器的采集范围确定的;所述检测装置还包括程度确定模块,用于根据各个所述区域对应的气体浓度以及对应的区域范围,确定泄漏气体总量;根据所述泄漏气体总量,确定所述管道的泄漏程度。
45、本技术实施例公开了一种飞行设备,包括:
46、存储有可执行程序代码的存储器;
47、与所述存储器耦合的处理器;
48、所述处理器调用所述存储器中存储的所述可执行程序代码,执行上述任一实施例所述的方法。
49、本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行上述任一实施例所述的方法。
50、通过本技术实施例公开的管道气体泄漏的检测方法、装置、飞行设备及存储介质,飞行设备可以在管道的泄漏气体对应的目标采集位置处,通过图像采集装置采集目标图像,并对目标图像进行识别,以确定泄漏气体在目标图像中的第一图像位置,若第一图像位置位于目标图像的中心区域,则飞行设备可以通过激光传感器确定泄漏气体对应的气体浓度,根据该泄漏气体对应的气体浓度以及管道的管道位置,确定管道的泄漏位置。实施本技术实施例,通过在管道的泄漏气体对应的目标采集位置处图像采集装置采集的目标图像,能够确定泄漏气体在目标图像中的第一图像位置,若该第一图像位置位于目标图像的中心区域,则说明在目标采集位置处,飞行设备能够准确使用激光传感器来测量泄漏气体对应的气体浓度,从而提高了激光传感器进行气体浓度测量的准确性,因此飞行设备再根据该泄漏气体对应的气体浓度以及管道的管道位置,就能够更准确地确定管道的泄漏位置,提高了泄漏位置的检测准确性。
- 还没有人留言评论。精彩留言会获得点赞!